

3. Работа силы тяжести, силы упругости и силы тяготения
Работа силы тяжести. Предположим, что на материальную точку М действует сила тяжести (рис. 9.10). Вычислим работу этой силы на перемещении М1M2, величина которого мала по сравнению с радиусом Земли. В этом случае модуль и направление силы тяжести постоянны. Проведем оси координат, направив ось z вверх по вертикали, и воспользуемся аналитическим выражением работы (8):
![]() .
.
Проекции силы на оси координат будут
Х=0; Y'=0; Z= - G.
Подставим эти значения в (9.8):
![]() .
.
Суммируем элементарные работы и переходим к пределу:
 .
.
Здесь z1-z2=H - величина вертикального перемещения точки М.
Если z1>z2, т. е. точка M1 расположена выше точки M2, работа силы тяжести положительна.
Если z1<z2, т. е. точка M1 расположена ниже точки М2, работа силы тяжести отрицательна.
Таким образом, окончательно
![]() ,
(9.18)
,
(9.18)
где знак плюс соответствует перемещению точки вниз, а знак минус -перемещению точки вверх.
Выражение (9.18) показывает, что работа силы тяжести равна взятому со знаком плюс или минус произведению силы тяжести на вертикальное перемещение точки ее приложения.
Работа силы тяжести не зависит от вида траектории, по которой перемещается точка ее приложения, а зависит лишь от расстояния между горизонтальными плоскостями, проходящими через начальное и конечное положения точки.
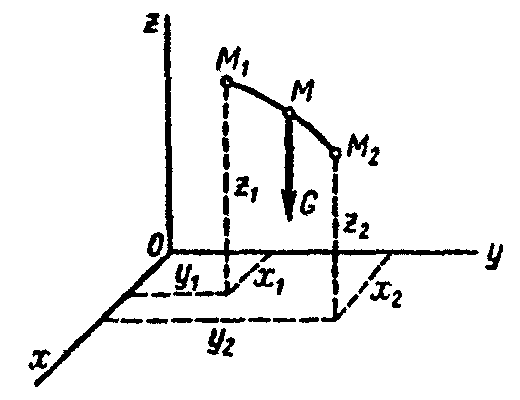
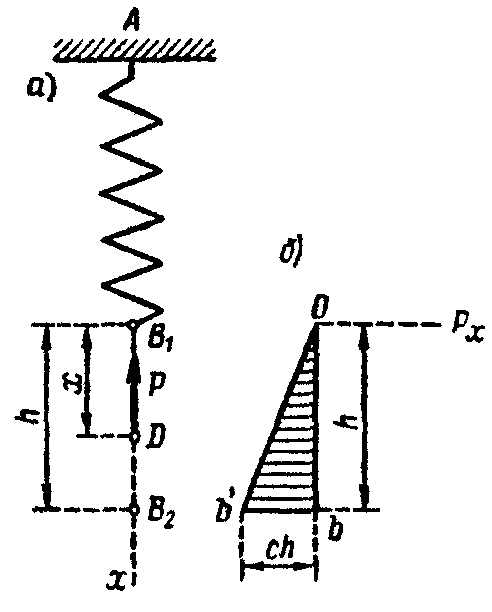
Рис. 9.10 Рис. 9.11
Работа силы упругости. Рассмотрим пружину АВ1, конец А которой закреплен неподвижно (рис. 9.11, а). При растяжении пружины в ней возникают силы упругости и на тело, вызывающее растяжение, действует реакция пружины . Эта сила направлена противоположно перемещению свободного конца пружины, а ее модуль пропорционален удлинению пружины:
![]() ,
,
где с - коэффициент жесткости пружины.
Направим ocь х по оси пружины, приняв за начало координат конец недеформированной пружины B1. Проекция силы упругости на ось х
![]() .
.
Вычислим работу силы упругости на перемещении с помощью формулы (9.8):
.
Проекции силы упругости, направленной по оси х, на оси координат
![]() .
.
Элементарная работа силы упругости.
![]() .
.
Работа силы упругости на перемещении B1B2 =h
![]() .
(9.19)
.
(9.19)
Наибольшей деформации пружины B1B2 соответствует наибольшее значение силы упругости Рmax= ch, а потому
![]() .
(9.20)
.
(9.20)
Работа силы упругости отрицательна в том случае, когда деформация увеличивается, т.е. когда сила упругости направлена противоположно перемещению ее точки приложения, и положительна, когда деформация уменьшается.
Работа силы на перемещении В1B2
![]() .
(9.21)
.
(9.21)
На рис. 9.11, б показан график изменения проекции силы упругости Рх, в зависимости от перемещения конца пружины х. Так как Рх= -сх, то линия графика Ob' — прямая. Работа силы упругости определяется площадью треугольника Оbb':
![]() .
.
т.е. имеем тот же результат, который был получен аналитически.
Если начальная деформация пружины не равна нулю, а равна хо, то работа силы упругости на дополнительной деформации (х1 – хо)
 .
(9.22)
.
(9.22)
Формулы (9.19)-(9.22) имеют большое применение в технических расчетах. Эти формулы используют для вычисления работы сил упругости во всех случаях, когда имеется пропорциональность между силами и деформацией, т. е. когда справедлив закон Гука.
Работа силы тяготения. Допустим, что на материальную точку М массой т, расположенную в пространстве на расстоянии r от неподвижного притягивающего центра С массой тo, действует сила тяготения
![]() .
.
Определим работу этой силы на перемещении точки из положения M1 в положение M2 (рис. 9.12). Проведем через неподвижный центр С оси декартовых координат. Элементарную работу силы вычислим с помощью формулы (9.8):
![]() .
.
Здесь
![]() .
.
Аналогично,
![]() .
.
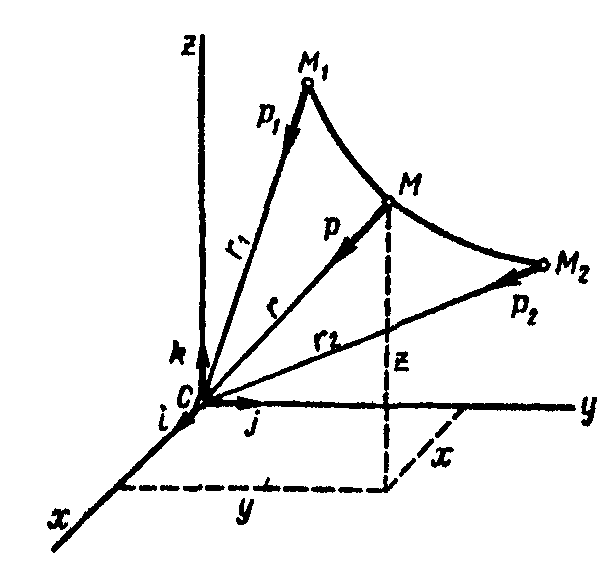
Рис. 9.12
Поэтому
![]() .
.
Так как
![]() ,
,
то
![]() .
.
Работа силы тяготения при перемещении точки из M1 в М2
 .
(9.23)
.
(9.23)
Как видно из (9.23), робота силы ньютонова притяжения не зависит от формы траектории точки.