

2. Теоремы о работе силы.
Т е о р е м а I. Работа равнодействующей силы на некотором перемещении равна алгебраической сумме работ cоcmавляющих сил на том же перемещении.
Предположим,
что на точку М
действуют силы
![]() (рис. 9.6).
Равнодействующая этих сил
(рис. 9.6).
Равнодействующая этих сил
![]() .
.
Если точка М получает элементарное перемещение , то элементарная работа равнодействующей силы на этом перемещении
![]()
Для вычисления работы равнодействующей силы на конечном участке пути M1M2 воспользуемся формулой (9.12):
 .
.
полученная сумма криволинейных интегралов представляет собой сумму работ отдельных сил на конечном участке пути M1M2. Таким образом,
![]() .
.
Т е о р е м а 2. Работа постоянной по модулю и направлению силы на результирующем перемещении равна алгебраической сумме работ этой силы на составляющих перемещениях.
Предположим,
что точка приложения постоянной по
модулю и направлению силы
получает совокупность последовательных
перемещений
![]() (рис. 7
выполнен для n=
3). Результирующее перемещение точки М
(рис. 7
выполнен для n=
3). Результирующее перемещение точки М
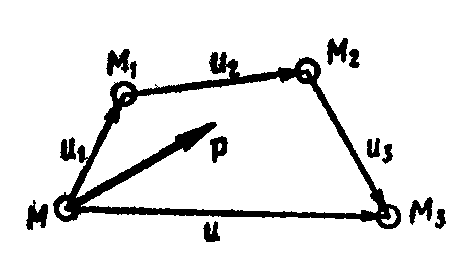
Рис. 9.7
![]() .
.
Работа силы на этом перемещении определяется по формуле (9.2):
![]() .
.
Полученная сумма представляет собой сумму работ силы на составляющих перемещениях. Таким образом,
![]() .
.
На основании этой теоремы при вычислении работы постоянной силы на криволинейном перемещении криволинейное перемещение можно заменить прямолинейным. При и= 0, т. е. в случае замкнутого контура, работа постоянной силы равна нулю.
Изображение работы в виде площади. Установлено, что работа переменной силы на конечном перемещении М1М2 определяется криволинейным интегралом, взятым вдоль дуги М1М2 траектории, которую описывает точка приложения силы.
Криволинейный интеграл, определяющий работу силы, вычисляется обычно аналитически с помощью формулы (9.13) или графически на основе формулы (9.11).
Для графического определения работы силы на перемещении М1М2 (см. рис. 9.3) используется график (рис. 9.8). По оси абсцисс этого графика отложены значения дуговой координаты точки s, а по оси ординат - соответствующие значения проекции силы на касательную . Построенная кривая изображает зависимость от s. Элементарная работа силы согласно (9.6)
![]() .
.
На
рис. 9.8 эта величина изображается
площадью элементарного прямоугольника,
имеющего основание ds
и высоту
![]() .
Работа силы
на перемещении М1М2
изобразится площадью фигуры acdb,
ограниченной осью абсцисс, кривой
=f(s)
и ординатами aс
и bd,
соответствующими точкам M1
и М2:
.
Работа силы
на перемещении М1М2
изобразится площадью фигуры acdb,
ограниченной осью абсцисс, кривой
=f(s)
и ординатами aс
и bd,
соответствующими точкам M1
и М2:
А = пл. acdb.
Если проекция силы на касательную отрицательна, то соответствующая площадь расположится ниже оси абсцисс и работа силы будет отрицательна. Для примера рассмотрим проводимое в механических лабораториях графическое вычисление работы, затрачиваемой на разрыв образца. На рис. 9.9 изображена полученная опытным путем диаграмма растяжения образца. По оси ординат отложена величина растягивающей
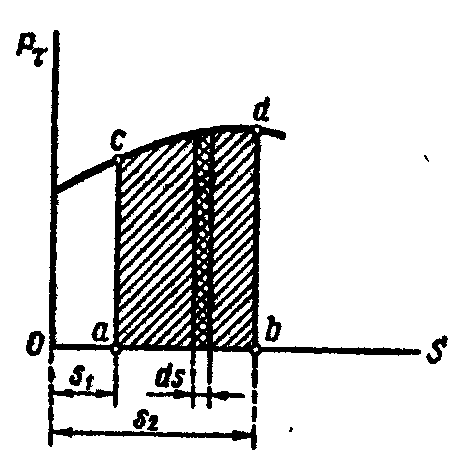

Рис. 9.8 Рис. 9.9
силы, а по оси абсцисс - производимое ею абсолютное удлинение образца, т. е. перемещение точки приложения силы. Точка В обозначает предел пропорциональности, С - предел текучести, D — наибольшую нагрузку, воспринимаемую образцом, К - нагрузку и момент разрыва образца. Работа, затрачиваемая на растяжение образца до предела пропорциональности, определяется площадью треугольника OBO1. Площадь obcdko3 определяет всю работу, затрачиваемую на разрыв испытуемого образца. Величину этой площади находят обычно с помощью планиметра или путем вычислений.
За единицу работы в системе МКС принимается 1 джоуль (Дж), т.е. работа силы, равной 1 Н на перемещении в 1 м по направлению силы; в системе СГС - 1 эрг, т. е. работа силы, равной 1 д на перемещении в 1 см по направлению силы; в системе МКГСС за единицу работы принимается 1 кгсм, т. е. работа силы, равной 1 кгс на перемещении в 1 м по направлению силы.
1 джоуль = 107 эрг =0,102 кг∙см, 1 кг∙см= 9,81 Дж.
Изменение
работы силы, отнесенное к единице
времени, называется мощностью
силы. Если
в течение малого промежутка времени dt
сила
совершает работу
![]() ,
то мощность этой силы
,
то мощность этой силы
![]() .
(9.14)
.
(9.14)
Таким образом, мощность силы равна скалярному произведению векторов силы и скорости ее точки приложения.
Аналитическое выражение мощности силы имеет вид
![]() ,
(9.15)
,
(9.15)
где — проекции скорости точки приложения силы на оси координат. Из формулы (9.14) имеем
![]() .
(9.16)
.
(9.16)
Если направления силы и скорости совпадают, то
![]() .
(9.17)
.
(9.17)
За единицу мощности в системе МКС принимается 1 ватт (Вт)=1 Дж/с = 0.102 кг∙см/с, а в системе СГС - 1 эрг/с.
В системе МКГСС за единицу мощности принимается 1 кг∙см/с.
Кроме того, применяются следующие единицы мощности: 1 киловатт (кВт)=103 Вт=102 кг∙см/с = 1,36 лошадиной силы (л. с.); 1 лошадиная сила= 75 кг∙см/с = 736 Вт. В технике часто за единицу работы принимается 1 киловатт-час (кВтч), т.е. работа, совершаемая в течение одного часа движущей сило машины, мощность которой равна 1 киловатту; 1 киловатт-час=1000∙3600 ватт-секунд = 36∙105 джоуль.