

Формулу (г) можно представить в виде: .
Дифференцируя это выражение по t, получаем необходимое для решения задачи четвертое уравнение:
![]() .
(д)
.
(д)
Из
уравнения (д) имеем
![]() .
.
Момент
инерции цилиндра относительно оси Сζ,
![]() .
.
Подставим эти значения в уравнение (в):
![]() или
или
![]() .
.
Решив
это уравнение совместно с уравнением
(а), найдем
![]() и
и
![]() ,
,
откуда
![]() .
.
Полученный
результат показывает, что центр масс
цилиндра движется равноускоренно с
ускорением
![]() ,
не зависящим от веса цилиндра.
,
не зависящим от веса цилиндра.
Для определения угла наклона плоскости, при котором начинается скольжение цилиндра, воспользуемся известным положением из статики:
![]() .
.
Подставим значения и N:
![]() откуда
откуда
![]() .
.
Таким
образом, скольжение начнется при
![]() .
.
3. Дифференциальные уравнения сферического движения твердого тела
Кинетический момент твердого тела, совершающего сферическое движение относительно неподвижное точки (рис. 8.5), определяется по общей формуле:
![]() .
(8.5)
.
(8.5)
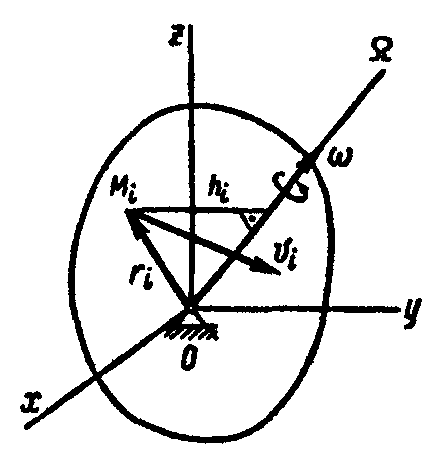
Рис. 8.5
После преобразований формулы (8.5), получим кинетический момент тела относительно точки О в виде
![]() .
(8.6)
.
(8.6)
Спроецируем правую и левую части уравнения (8.6) на оси х,у,z, проходящие через точку О,, получаем формулы для вычисления кинетических моментов тела, совершающего сферическое движение относительно осей х, у и z:
![]() (8.7)
(8.7)
Если за оси координат приняты главные оси инерции в неподвижной точке О, то центробежные моменты инерции тела относительно этих осей равны нулю, т. е.
![]()
тогда формулы (8.7) принимают вид
![]() .
(8.8)
.
(8.8)
Дифференциальные
уравнения сферического движения твердого
тела (динамические уравнения Эйлера).
При сферическом
движении твердого тела его кинетический
момент
![]() относительно неподвижной точки О
изменяется согласно уравнению:
относительно неподвижной точки О
изменяется согласно уравнению:
![]() .
.
Свяжем
с движущимся телом подвижные оси
координат ξ,η,ζ,
обозначив орты этих осей
![]() (рис. 8.6). Разложим вектор
на составляющие, имеющие направление
осей ξ,η,ζ :
(рис. 8.6). Разложим вектор
на составляющие, имеющие направление
осей ξ,η,ζ :
![]() ,
(8.9)
,
(8.9)
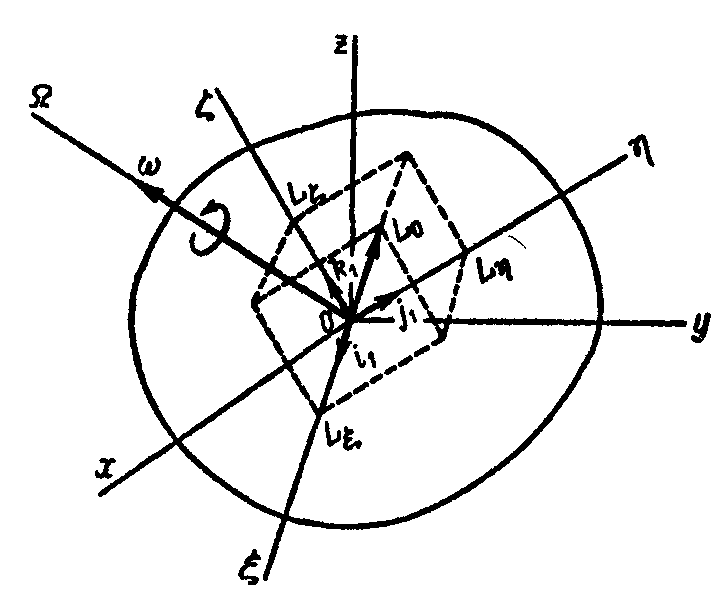
Рис. 8.6
Проекции
![]() вектора
на оси ξ,η,ζ
представляют собой кинетические
моменты тела относительно этиx осей.
Определим производную d
/dt,
учитывая, что орты
—
переменные векторы:
вектора
на оси ξ,η,ζ
представляют собой кинетические
моменты тела относительно этиx осей.
Определим производную d
/dt,
учитывая, что орты
—
переменные векторы:
![]() .
(а)
.
(а)
После соответствующих преобразований получим равенство:
Этому векторному равенству соответствуют три равенства в проекциях на подвижные оси ξ,η,ζ:
![]() (8.10)
(8.10)
Если за подвижные координатные оси приняты главные оси инерции тела в точке О, то кинетические моменты тела относительно этих осей определяются по формулам (8.8):
![]()
В этом случае уравнения (8.11) принимают вид
![]() (8.11)
(8.11)
где
![]() — моменты
инерции тела относительно его осей
инерции в точке О;
— моменты
инерции тела относительно его осей
инерции в точке О;
![]() — главные
моменты внешних сил, приложенные к телу,
относительно этих осей;
— главные
моменты внешних сил, приложенные к телу,
относительно этих осей;
![]() — проекции вектора угловой скорости
тела и на оси
— проекции вектора угловой скорости
тела и на оси
![]() .
Эти проекции можно определить по формулам
Эйлера:
.
Эти проекции можно определить по формулам
Эйлера:
где
![]() - углы Эйлера,
определяющие положение тела при,
сферическом движении.
- углы Эйлера,
определяющие положение тела при,
сферическом движении.
Дифференциальные уравнения (8.11) сферического движения твердого тела называются динамическими уравнениями Эйлера.
Интегрирование динамических уравнений Эйлера связано с большими трудностями. Поэтому исследователи этого вопроса рассматривали лишь частные случаи сферического движения твердого тела.