

2. Дифференциальные уравнения плоского движения твердого тела
Предположим, что твердое тело совершает плоское движение. Совместим с плоскостью чертежа плоскость, в которой движется центр масс тела, показав плоскую фигуру, полученную от сечения тела этой плоскостью (рис. 8.3). В динамике за полюс принимают не произвольную точку фигуры, а центр масс тела. Тогда уравнения движения плоской фигуры имеют вид
![]() .
.
Если известны внешние силы , действующие на тело, то два дифференциальных уравнения движения плоской фигуры можно получить из дифференциальных уравнений:
![]() ,
,
где т — масса тела; XЕ и УЕ — проекции главного вектора внешних сил, приложенных к телу, на оси х и у.
Третье дифференциальное уравнение движения плоской фигуры получают из уравнения :
![]() .
.
Здесь
Lζr
- кинетический
момент тела относительно оси ζ
в относительном
движении тела по отношению к центру
масс (ось ζ проходит через центр масс
тела перпендикулярно чертежу);
![]() -
главный момент внешних сил, приложенных
к телу, относительно той же оси ζ.
-
главный момент внешних сил, приложенных
к телу, относительно той же оси ζ.
Так
как относительное движение тела по
отношению к центру
масс,
т. е. по
отношению к подвижной системе осей Сξηζ
, является вращением вокруг оси ζ, то
кинетический момент
![]() определяется по формуле (8.1):
определяется по формуле (8.1):
![]() .
.
Дифференцируем по t:
![]() .
.
Подставляем это значение в уравнение:
![]() .
.
Таким образом, дифференциальные уравнения плоского движения твердого тела имеют следующий вид:
![]() .
(8.3)
.
(8.3)
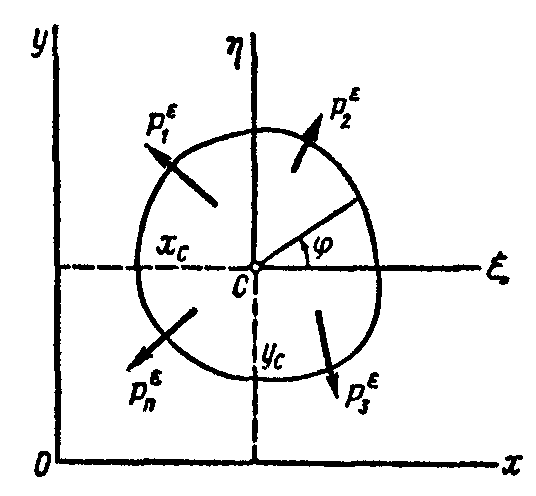
Рис. 8.3
Интегрируя
эти уравнения,
можно
определить xC,
уC
, zC
как функции времени. Для определения
шести постоянных интегрирования
используются начальные условия движения:
координаты центра масс
![]() и угол
поворота тела
и угол
поворота тела
![]() в начальный момент to=
0, а также проекции начальной скорости
центра масс на оси координат
в начальный момент to=
0, а также проекции начальной скорости
центра масс на оси координат
![]() и начальная угловая скорость тела
и начальная угловая скорость тела
![]() .
.
При определении движения несвободного твердого тела наряду с задаваемыми внешними силами учитываются и неизвестные реакции связей. В этом случае для решения задачи используются дополнительные уравнения, определяющие ограничения движения тела имеющимися связями.
В том случае, когда траектория центра масс задана, удобно пользоваться дифференциальными уравнениями движения точки С в проекциях на касательную и главную нормаль к этой траектории.
Тогда дифференциальные уравнения плоского движения твердого тела имеют вид
![]() .
(8.4)
.
(8.4)
Здесь sc - дуговая координата центра масс, vc - его скорость и ρ - радиус кривизны его траектории.
Пример.
Однородный цилиндр весом G
и радиусом r
катится без скольжения по наклонной
плоскости, составляющей с горизонтом
угол а.
Коэффициент сцепления равен
![]() (рис. 8.4). Определить: 1) ускорение движения
центра масс цилиндра и 2) угол наклона
плоскости, при котором начинается
скольжение цилиндра, без учета
сопротивления качению.
(рис. 8.4). Определить: 1) ускорение движения
центра масс цилиндра и 2) угол наклона
плоскости, при котором начинается
скольжение цилиндра, без учета
сопротивления качению.
Решение. Движение цилиндра совершается под действием трех внешних: силы тяжести , нормальной реакции плоскости и силы сцепления . Направим оси х и у, как указано на рисунке. Через центр масс цилиндра С проведем оси ξ и η и ось ζ, перпендикулярную плоскости чертежа и направленную вверх. Момент силы относительно оси Сζ будет положителен, если сила стремится вращать плоскость чертежа вокруг точки С в направлении против вращения часовой стрелки, и отрицателен - в противоположном случае.
Составим дифференциальные уравнения (8.3) плоского движения тела:
![]() ,
(а)
,
(а)
![]() ,
(б)
,
(б)
![]() .
(в)
.
(в)
Так
как за рассматриваемый промежуток
времени
![]() ,
то
,
то
![]() ,
а потому
из уравнения (б)
,
а потому
из уравнения (б)
![]() ,
откуда
,
откуда
![]() .
.
Дифференциальные
уравнения (а) и (в) содержат три неизвестные
величины:
![]()
![]() и
и
![]() .
Для определения
этих
неизвестных к двум составленным
уравнениям добавим еще одно.
.
Для определения
этих
неизвестных к двум составленным
уравнениям добавим еще одно.
Так как цилиндр катится без скольжения, то точка Р соприкасания среднего сечения цилиндра с плоскостью является мгновенным центром скоростей среднего сечения. Поэтому
![]() .
(г)
.
(г)
Проекция
скорости точки С
на ось х:
![]() .
.
Алгебраическая
величина угловой скорости
![]() отрицательна, так как цилиндр вращается
по вращению часовой стрелки, т. е.
отрицательна, так как цилиндр вращается
по вращению часовой стрелки, т. е.
![]() ,
где |ω|
— абсолютное значение угловой скорости.
,
где |ω|
— абсолютное значение угловой скорости.
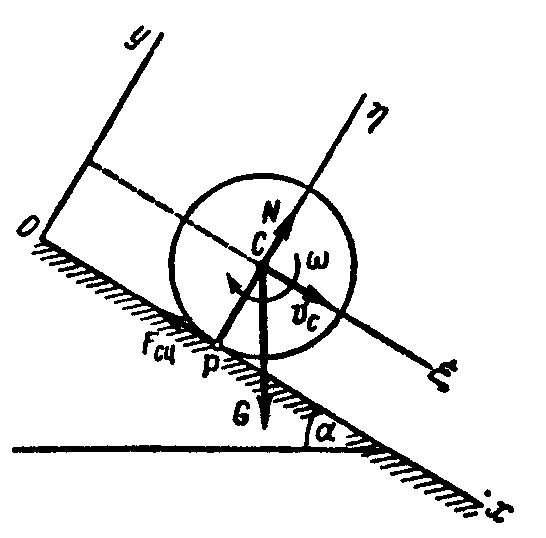
Рис. 8.4