

Кинетический момент механической системы относительно центра о
![]() .
(7.11)
.
(7.11)
Кинетическим моментом (или главным моментом количеств движения механической системы относительно оси) называется алгебраическая сумма моментов количеств движения всех материальных точек системы относительно этой оси.
Момент
количества движения
![]() каждой точки
системы (рис. 7.1, б)
относительно оси Оz
определяется
согласно (7.3). Кинетический момент системы
относительно оси (рис. 7.5) определяется
по зависимости:
каждой точки
системы (рис. 7.1, б)
относительно оси Оz
определяется
согласно (7.3). Кинетический момент системы
относительно оси (рис. 7.5) определяется
по зависимости:
![]() .
(7.12)
.
(7.12)
Кинетические моменты механической системы относительно некоторого центра О и какой-либо оси z, проходящей через этот центр, связаны такой же зависимостью, как и главные моменты системы сил относительно центра и оси, т. е.
![]() .
(7.13)
.
(7.13)
Таким образом, проекция кинетического момента механической системы относительно некоторого центра О на ось, проходящую через этот центр, равна кинетическому моменту системы относительно этой оси.
Теорема
об изменения кинетического момента
механической системы. Пусть
система материальных точек
![]() ,
движется под действием некоторой системы
сил, которые разделим на внешние силы
,
движется под действием некоторой системы
сил, которые разделим на внешние силы
![]() и внутренние силы
и внутренние силы
![]() .
.
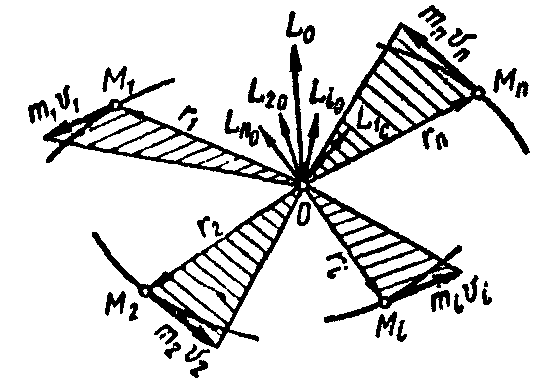
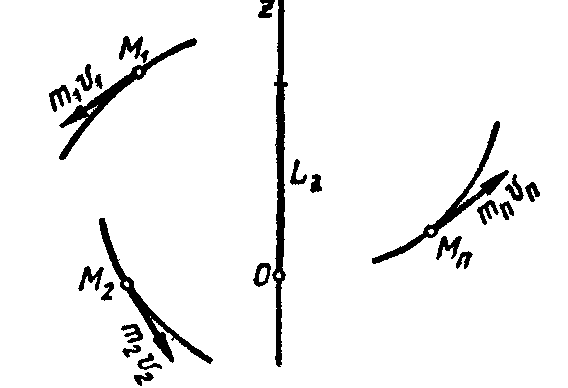
Рис. 7.4 Рис. 7.5
Выберем некоторый неподвижный центр О и определим изменение момента количества движения каждой точки относительно этого центра по уравнению (7.7):
![]() .
.
Просуммируем полученные n уравнений:
![]() .
(a)
.
(a)
Как
указывалось ранее, геометрическая сумма
моментов всех внутренних сил относительно
любого центра равна нулю, т. е.
![]() .
Преобразуем левую часть равенства (а),
учитывая (7.11):
.
Преобразуем левую часть равенства (а),
учитывая (7.11):
![]() .
.
Тогда уравнение (а) принимает вид
![]() .
(7.14)
.
(7.14)
Уравнение (7.14) выражает теорему об изменении кинетического момента механической системы: производная по времени от кинетического момента механической системы относительно некоторого неподвижного центра геометрически равна главному моменту внешних сил, действующих на эту систему относительно того же центра.
Векторному равенству (7.14) соответствуют три равенства в проекциях на оси координат:
![]() (7.15)
(7.15)
Здесь
согласно (7.13)
— кинетические моменты механической
системы относительно осей координат,
а
![]() — главные моменты внешних сил относительно
этих осей.
— главные моменты внешних сил относительно
этих осей.
Уравнения (7.15) показывают, что производная по времени от кинетического момента механической системы относительно некоторой оси равна главному моменту внешних сил относительно этой оси.
Следствия из теоремы. 1. Если главный момент внешних сил относительно некоторого неподвижного центра остается все время равным нулю, то кинетический момент механической системы относительно этого центра остается постоянным.
Из
уравнения (7.14) следует, что если
![]() ,
то
,
то
![]() .
(7.16)
.
(7.16)
2. Если главный момент внешних сил относительно некоторой оси остается все время равным нулю, то кинетический момент механической системы относительно этой оси остается постоянным.
Из
уравнения (7.15) следует, что если, например,
![]() ,
то
,
то
. (7.17)
Следствия из теоремы об изменении кинетического момента механической системы выражают закон сохранения кинетического момента механической системы.
Пример.
Шарик М
привязан к нити МВА,
часть ВА
которой продета сквозь вертикальную
трубку (рис. 7.6). В момент, когда шарик
находится на расстоянии
![]() от оси z
трубки, ему сообщают начальную скорость
от оси z
трубки, ему сообщают начальную скорость
![]() ,
перпендикулярную плоскости МВА.
Одновременно нить начинают медленно
втягивать в трубку. Найти, какую скорость
,
перпендикулярную плоскости МВА.
Одновременно нить начинают медленно
втягивать в трубку. Найти, какую скорость
![]() будет иметь шарик, когда его расстояние
от оси z
станет равно
будет иметь шарик, когда его расстояние
от оси z
станет равно
![]() .
.

Рис. 7.6
Решение.
На шарик действуют сила тяжести
и реакция
нити
![]() .
Моменты этих сил относительно оси z
равны нулю, так как сила
параллельна оси z,
а сила
эту
ось пересекает. Тогда по уравнению
теоремы моментов относительно центра
.
Моменты этих сил относительно оси z
равны нулю, так как сила
параллельна оси z,
а сила
эту
ось пересекает. Тогда по уравнению
теоремы моментов относительно центра
![]()
находим
![]() ,
,
откуда
![]() .
Так как масса т
постоянна, то отсюда следует, что при
движении шарика
.
Так как масса т
постоянна, то отсюда следует, что при
движении шарика
![]() .
Следовательно,
.
Следовательно,
![]() .
.
По мере приближения шарика к оси его скорость растет.
Лекция 8
ДИНАМИКА ВРАЩАТЕЛЬНОГО
ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
1. Дифференциальное уравнение вращения твердого
тела вокруг неподвижной оси
Рассмотрим твердое тело, вращающееся вокруг неподвижной оси z с угловой скоростью ω (рис. 8.1). Вычислим кинетический момент этого тела относительно оси его вращения. Момент количества движения точки Mi тела относительно оси z:
![]() .
(а)
.
(а)
где ri - радиус окружности, описываемой точкой Мi; vi= riω - алгебраическая величина вращательной скорости точки Мi. Подставляя в (а) это значение vi, получаем
![]() .
.
Кинетический момент твердого тела относительно оси z
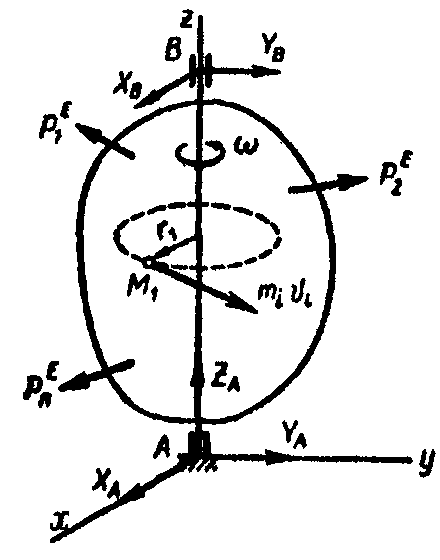
Рис. 8.1
![]()
Здесь
![]() - момент инерции твердого тела
относительно оси z.
- момент инерции твердого тела
относительно оси z.
Таким образом,
![]() ,
(8.1)
,
(8.1)
т. е. кинетический момент вращающегося твердого тела относительно неподвижной оси его вращения равен произведению момента инерции тела относительно той же оси на угловую скорость тела.
Рассмотрим изменение кинетического момента тела относительно оси z под действием приложенных к нему задаваемых внешних сил . Теорема об изменении кинетического момента механической системы выражается уравнением:
![]() .
.
Реакции подшипника В и подпятника А являются внешними силами, но при отсутствии трения их моменты относительно оси z равны нулю и правая часть уравнения содержит только сумму моментов задаваемых внешних сил. При наличии трения эта сумма содержит также момент сил трения. Так как по (8.1)
![]() ,
,
то
![]() ,
,
а потому уравнение принимает вид
![]() .
(8.2)
.
(8.2)
Уравнение (8.2) представляет собой дифференциальное уравнение вращения твердого тела вокруг неподвижной оси.
Сравним уравнение (8.2) с дифференциальным уравнением поступательного прямолинейного движения твердого тела:
![]() .
.
Очевидно, что момент инерции твердого тела при вращательном движении имеет то же значение, что и масса тела при его поступательном движении: момент инерции является характеристикой инертности тела при вращательном движении.
Если
вращение тела происходит в одном
направлении, то это направление считают
положительным. В этом случае моменты
движущих сил положительны, моменты
сил сопротивления отрицательны, а
главный момент внешних сил может иметь
тот или другой знак. Если
![]() ,
т.е. тело вращается ускоренно. Если
,
т.е. тело вращается ускоренно. Если
![]() ,
т. е. вращение тела равномерное (по
инерции). Если
,
т. е. вращение тела равномерное (по
инерции). Если
![]() ,
т. е. тело вращается замедленно.
,
т. е. тело вращается замедленно.
По дифференциальному уравнению (8.2) можно решать следующие задачи:
- по заданному уравнению вращения тела φ=f(t) и его моменту инерции Jz определять главный момент внешних сил, действующих на тело:
![]() ;
;
- по заданным внешним силам, приложенным к телу, по начальным условиям вращения φо и ωо и по моменту инерции тела Jz находить уравнение вращения тела φ=f(t);
3)
определять момент инерции тела Jz
относительно оси вращения, зная величины
![]() и
и
![]() .
.
Пример. Натяжения ветвей ремня, приводящего во вращение шкив, равны 20 и 40 Н. Шкив имеет вес 80 Н, радиус 30 см и радиус инерции относительно оси вращения 25 см. Составить уравнение вращения шкива из состояния покоя, пренебрегая трением.
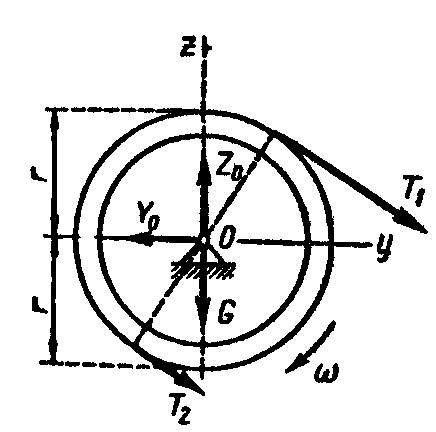
Рис. 8.2
Решение. Дифференциальное уравнение вращения шкива вокруг неподвижной оси Ох (рис. 8.2) имеет вид (8.2):
![]() .
.
К
шкиву приложены внешние силы: реакции
ветвей ремня
![]() и
и
![]() ,
вес шкива
и составляющие
реакции опоры
,
вес шкива
и составляющие
реакции опоры
![]() и
и
![]() .
.
Направление вращения тела принимают всегда за положительное. Тогда моменты сил, направленных в сторону вращения, положительны, а моменты сил, направленных противоположно, отрицательны. Главный момент внешних сил
![]()
(моменты сил , , относительно оси Ох равны нулю). Момент инерции шкива определяем по радиусу инерции:
![]()
Подставляем
числовые значения Jx
и
![]() в уравнение (8.2):
в уравнение (8.2):
![]() Отсюда
находим угловое ускорение:
Отсюда
находим угловое ускорение:
![]() .
.
Интегрируем
дважды по t:
![]() .
.
По
начальным условиям
![]() находим С1
= 0 и C2=0.
Таким образом, уравнение вращения шкива
имеет вид
находим С1
= 0 и C2=0.
Таким образом, уравнение вращения шкива
имеет вид
![]() .
.