

Импульс силы
Импульс
силы.
Если постоянная
по модулю и направлению сила
действует в течение промежутка времени
![]() ,
то ее импульсом за этот промежуток
времени является вектор
,
то ее импульсом за этот промежуток
времени является вектор
![]() .
(6.5)
.
(6.5)
Направление этого вектора совпадает с направлением силы.
Импульс силы характеризует передачу материальной точке механического движения со стороны действующих на нее тел за данный промежуток времени.
Единицами
импульса являются: в системе МКС
- импульс силы в 1 Н
за время в 1 с,
т. е. 1 Нс
(кг∙м/с),
в системе СГС
- 1 дин∙с
(г∙см/с),
а в системе МКГСС
-1 кгс∙с.
Чтобы найти импульс переменной силы
![]() за промежуток времени
за промежуток времени
![]() этот промежуток разбивают на п
элементарных промежутков
этот промежуток разбивают на п
элементарных промежутков
![]() и определяют элементарные импульсы
силы за эти промежутки, модуль элементарного
импульса
и определяют элементарные импульсы
силы за эти промежутки, модуль элементарного
импульса
![]() ,
равен произведению модуля силы в момент
tк
на
,
a
направление совпадает с направлением
силы в этот момент (рис. 6.4):
,
равен произведению модуля силы в момент
tк
на
,
a
направление совпадает с направлением
силы в этот момент (рис. 6.4):
![]() .
(6.6)
.
(6.6)
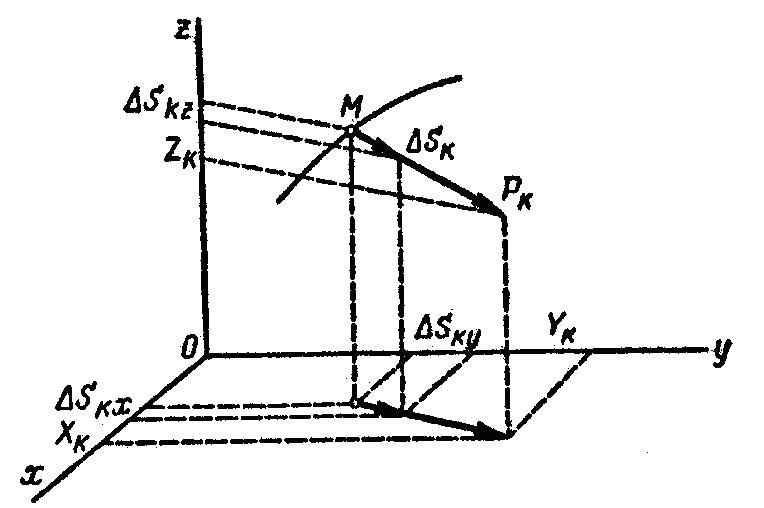
Рис. 6.4
Импульс
силы
![]() за промежуток
за промежуток
![]() определяется как предел геометрической
суммы элементарных импульсов при n→∞
и при
определяется как предел геометрической
суммы элементарных импульсов при n→∞
и при
![]() →0:
→0:
![]() .
.
Предел
векторной суммы бесчисленного множества
бесконечно малых слагаемых
![]() Δtк
при Δtк→0
называется векторным интегралом от
вектора
по скалярному аргументу t
и обозначается
Δtк
при Δtк→0
называется векторным интегралом от
вектора
по скалярному аргументу t
и обозначается
 .
Таким образом,
.
Таким образом,
 .
(6.7)
.
(6.7)
Модуль
и направление импульса переменной силы
можно определить по способу проекций.
Импульс
![]() переменной
силы за промежуток времени
представляет собой предел геометрической
суммы элементарных импульсов
переменной
силы за промежуток времени
представляет собой предел геометрической
суммы элементарных импульсов
![]() .
Поэтому проекция импульса
.
Поэтому проекция импульса
![]() на каждую
координатную ось раина пределу
алгебраической суммы проекций элементарных
импульсов
на каждую
координатную ось раина пределу
алгебраической суммы проекций элементарных
импульсов
![]() на эту ось. Проекции элементарного
импульса
=
на эту ось. Проекции элементарного
импульса
=
![]() на оси координат (рис. 6.4):
на оси координат (рис. 6.4):
![]()
аналогично,
![]()
где Xк,Yк,Zк – проекция силы к на оси координат.
Просуммировав проекции элементарных импульсов и прейдя к пределу, получим определенные интегралы по переменной l, представляющие собой проекции импульса на оси координат:
 (6.8)
(6.8)
Здесь
![]() - проекции переменной силы
- проекции переменной силы
![]() на оси координат. Модуль и направление
импульса
определяются по его проекциям:
на оси координат. Модуль и направление
импульса
определяются по его проекциям:
 (6.9)
(6.9)
Для постоянной по модулю и направлению силы , действующей в течение промежутка времени τ, формулы (6.8) имеют вид:
![]() (6.10)
(6.10)
где X,Y,Z - проекции силы на оси координат.
Импульс
равнодействующей. Если
к точке М
приложено несколько сил
![]() ,
то равнодействующая этих сил
,
то равнодействующая этих сил
![]() .
Умножим обе части этого равенства на
dt
и проинтегрируем в пределах от t1
до
t2:
.
Умножим обе части этого равенства на
dt
и проинтегрируем в пределах от t1
до
t2:
Так как каждый из членов этого равенства представляет собой импульс соответствующей силы, то
![]() ,
(6.11)
,
(6.11)
т.е. импульс равнодействующей нескольких сил за некоторый промежуток времени равен геометрической сумме импульсов составляющих сил за этот же промежуток времени.