

3 Теорема о моментах инерции твердого тела относительно параллельных осей
Момент инерции твердого тела относительно некоторой оси равен моменту инерции тела относительно параллельной оси, проходящей через его центр масс, сложенному с произведением массы тела на квадрат расстояния между осями.
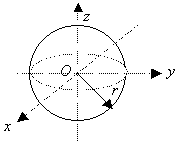
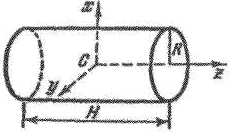
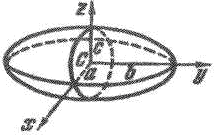
Допустим, что задана ось Oz1. Для доказательства теоремы проведем через центр масс тела С три взаимно перпендикулярные оси, из которых ось Сz параллельна заданной оси Oz1, а ось Су лежит в плоскости параллельных осей Сz и Oz1 (рис. 5.3, а, 6). Обозначим d расстояние между осями Сz и Oz1. Для вычисления моментов инерции тела относительно осей Сz и Oz1 опустим из каждой точки Мi рассматриваемого тела перпендикуляры ri и hi на оси Сz и Oz1. Выразим длины этих перпендикуляров через координаты этих точек:
![]() (a)
(a)
Определим моменты инерции тела относительно осей Сz и Oz1:
![]()
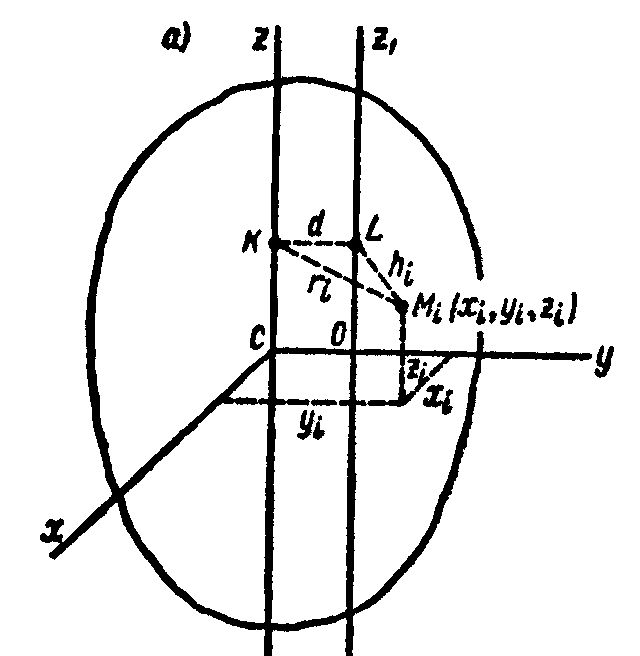
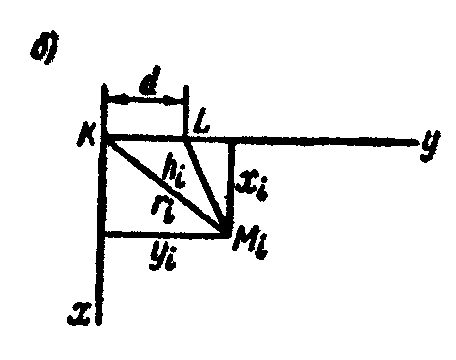
Рис. 5.3
Применим зависимость (а):
![]()
или
![]() (б)
(б)
Здесь
![]() — масса
тела. Из
формулы (6), определяющей координату ус
центра масс тела, получим
— масса
тела. Из
формулы (6), определяющей координату ус
центра масс тела, получим
![]()
Так как ус=0, то
![]()
Подставляя это значение в равенство (б), получаем зависимость, установленную теоремой:
![]() (5.15)
(5.15)
Формула (5.15) показывает, что из совокупности параллельных осей ось, проходящая через центр масс тела, характеризуется наименьшим моментом инерции. Полярный момент инерции твердого тела относительно центра масс согласно (5.12)
![]()
Отсюда следует, что центр масс тела является noлюсом, относительно которого полярный момент инерции тела имеет наименьшее возможное значение.
Воспользуемся формулой (5.15) для установления зависимости между радиусами инерции твердого тела iСz и iz1 относительно осей Сz и Oz1. Согласно (5.14),
![]()
тогда
![]()
откуда
![]() .
(5.16)
.
(5.16)
4. Примеры определения моментов инерции масс тел простейшей формы
Вычислим моменты инерции некоторых однородных симметричных тел относительно осей, проходящих через центры масс тел и являющихся осями симметрии. Ось, проходящая через центр масс тела, называется центральной осью.
Моменты инерции некоторых тел
Наименование |
Схема тела |
Момент инерции |
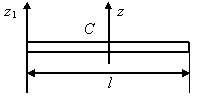
Тонкий прямолинейный стержень |
|
|
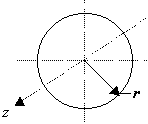
Кольцо (материальная окружность) |
|
|
Тонкий круглый диск |
|
|
Шар |
|
|
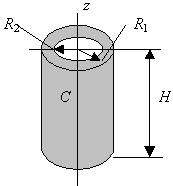
Полый цилиндр |
|
|
Однородный круглый конус |
|
|
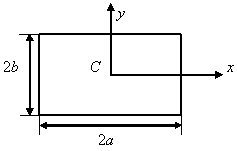
Сплошная прямоугольная пластина |
|
|
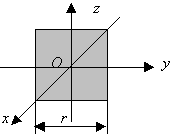
Сплошной квадрат |
|
|
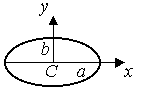
Площадь эллипса |
|
|
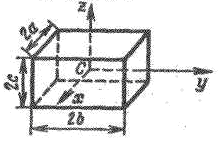
Прямоугольный параллелепипед
|
|
|
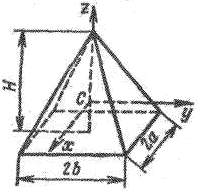
Прямоугольная пирамида |
|
|
Прямой круглый цилиндр |
|
|
Тор |
|
|
Эллипсоид |
|
|




Понятие о центробежных моментах инерции, главные оси. Проведем через некоторую точку О тела три взаимно перпендикулярные оси х, у, z и произвольно направленную ось v, составляющую с этими осями углы α, β и γ (рис. 5.4). Определим момент инерции Jv данного тела относительно оси v. Разобьем все тело на множество материальных точек Мi (i= 1,2, ..., n). Опустим из каждой точки Мi (хi,yi,zi) перпендикуляры на ось v: (MiKi =hi) и составим выражение момента инерции данного тела относительно оси v:
![]() .
(5.25)
.
(5.25)
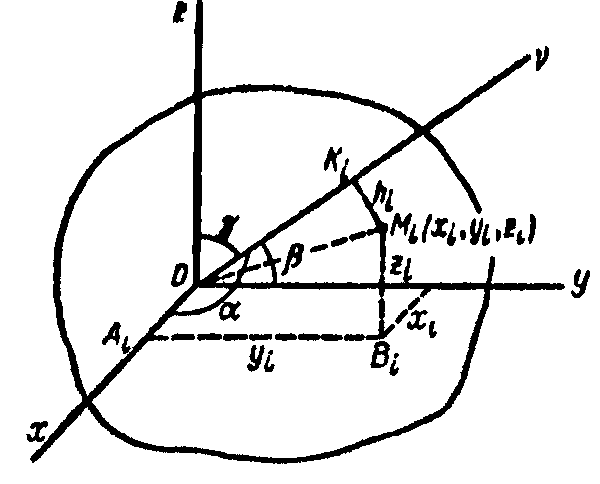
Рис. 5.4
Соединив
точку
![]() с началом координат О,
получим треугольник ОМiКi,
из которого найдем
с началом координат О,
получим треугольник ОМiКi,
из которого найдем
![]() .
(а)
.
(а)
где
![]() ,
,
а отрезок ОКi - проекция отрезка ОМi на ось v. Заметим, что
![]() .
.
Проецируем векторы левой и правой частей этого равенства на ось v: ОКi= ОAicos a + AiBi cos β + ВiМi cos γ, или ОКi =xi cos a + yi cos β +zi cos γ.
Подставим значения OMi и OKi в выражение (а):
![]() .
.
Умножим
сумму
![]() в правой части равенства на величину
(cos2а
+ cos2
β
+ cos2
γ),
равную единице:
в правой части равенства на величину
(cos2а
+ cos2
β
+ cos2
γ),
равную единице:
![]() .
.
Подставим
это
значение
![]() в формулу (5.25):
в формулу (5.25):
![]()
В первые три слагаемых правой части входят множителями выражения (5.9), определяющие моменты инерции данного тела относительно координатных осей. Обозначим их следующим образом:
![]()