

2. Синтез эвольвентной зубчатой передачи.
2.1. Анализ исходных данных.
Модуль зубчатых
колёс:
![]() .
.
Угол наклона
зубьев:
![]() .
.
Числа зубьев: ![]() .
.
Ориентировочное межосевое расстояние:
![]() .
Принимаем:
.
Принимаем:
![]() .
.
2.2. Геометрический расчёт эвольвентной зубчатой передачи.
Наименьший коэффициент смещения на меньшем колесе, обеспечивающий отсутствие подреза:
![]() .
.
Коэффициент изменения межцентрового расстояния:
![]() .
.
Угол зацепления корригированной передачи:
 ,
,
![]() .
.
Необходимый коэффициент суммарного смещения на оба колеса:
![]() .
.
Принимаем:
![]() ,
тогда коэффициент смещения на большем
колесе:
,
тогда коэффициент смещения на большем
колесе:
![]() .
.
Коэффициент уменьшения высоты зубьев:
![]() .
.
Высота зубьев:
![]() .
.
Диаметры окружностей:
— делительных: |
|
|
|
— начальных: |
|
|
|
— основных: |
|
|
|
— вершин: |
|
|
|
— впадин: |
|
|
|
Угловой шаг зубьев шестерни:
![]() .
.
Угловой шаг зубьев колеса:
![]() .
.
Шаги по хордам делительных окружностей колес:
![]()
![]()
Толщины зубьев по делительным окружностям колёс:
![]() ,
,
![]() .
.
Угловые толщины зубьев по делительным окружностям:
![]()
![]()
Толщины зубьев по хордам делительных окружностей:
![]()
![]()
![]()
Угол давления на окружности вершин меньшего колеса:
![]() .
.
Угол давления на окружности вершин большего колеса:
![]() .
.
Проверка зуба на заострение:
Значит, условие отсутствия заострения выполняется.
Здесь условие отсутствия заострения также выполняется.
Коэффициент перекрытия зубчатой передачи:

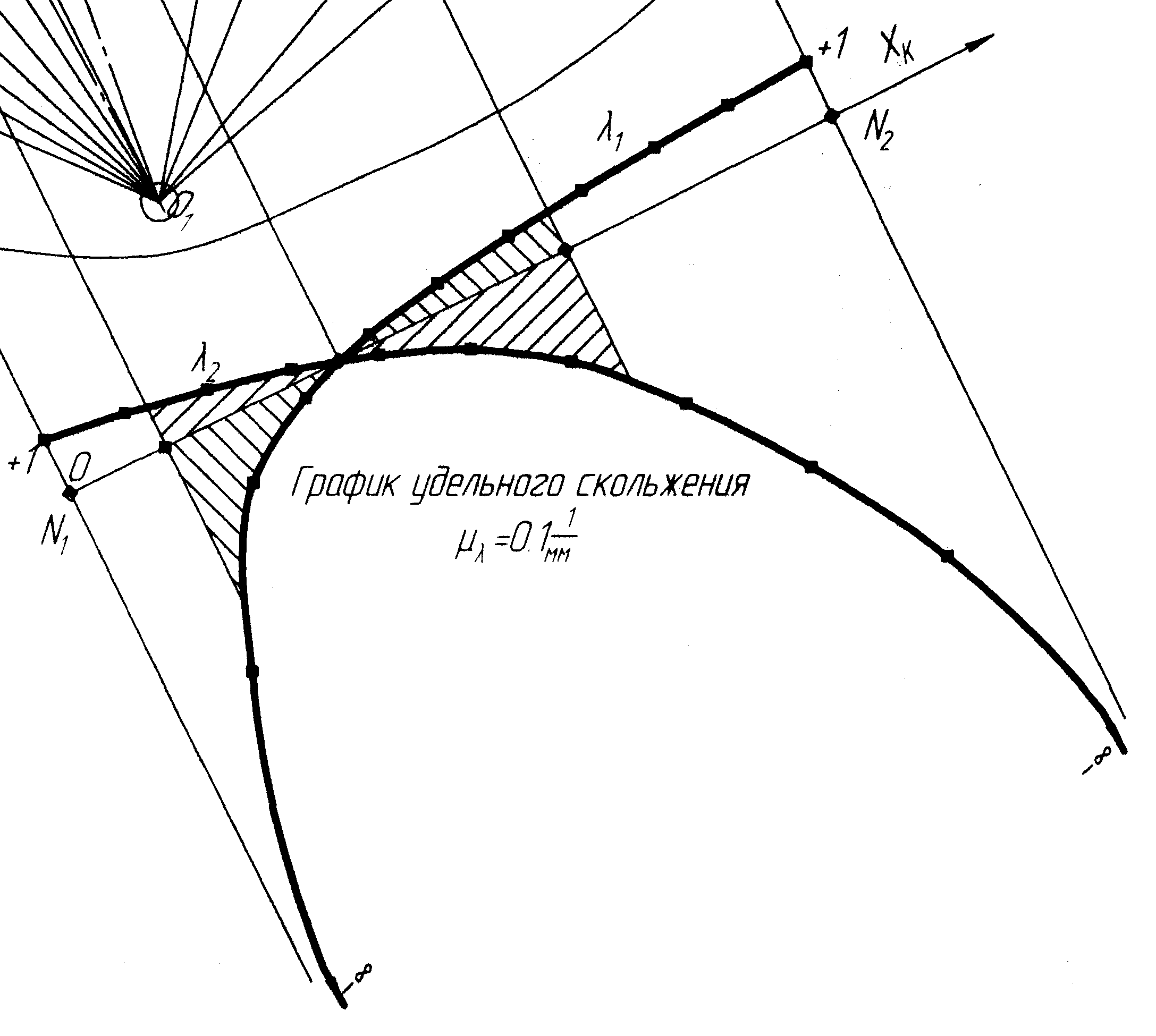
2.3. Построение графика удельного скольжения.
График строим в системе λOxk, в которой ось ординат проводим как продолжение линии O1N1, а ось абсцисс — параллельно линии зацепления N1N2. Обозначим абсциссу произвольной точки K на линии зацепления через xk. Тогда удельные скольжения будут равны
![]() ,
,
![]() .
.
Здесь
![]() .
.
Определив значения
λ1 и λ2, строим
их графики. При
![]()
![]() ,
,
![]() ;
при
;
при
![]()
![]() ,
,
![]() .
.
Рис. 8. График удельного скольжения.
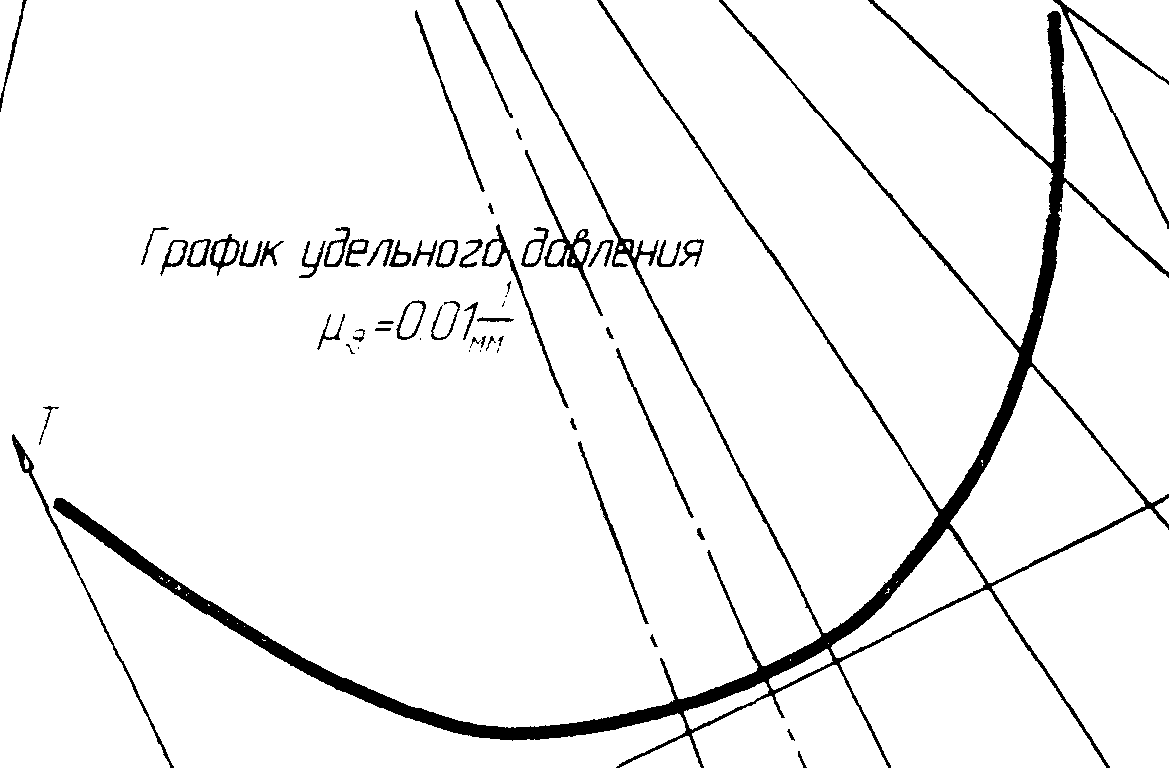
2.4. Построение графика удельного давления.
График строим в системе λOxk, в которой ось ординат проводим как продолжение линии O1N1, а ось абсцисс — параллельно линии зацепления N1N2. Обозначим абсциссу произвольной точки K на линии зацепления через xk. Тогда удельные скольжения будут равны
![]() .
.
Определив значения
υ, строим его график. При
и
![]() .
.
Рис. 9. График удельного давления.
3. Синтез планетарного редуктора.
Планетарные редукторы, являясь передаточными механизмами, соединены последовательно с двигателем и рабочей машиной и служат для изменения частоты вращения и крутящего момента двигателя. Планетарные редукторы, как правило, проектируются соосными и многосателитными, что обеспечивает разгрузку центральных валов механизма от усилий. Такие конструкции компактны и удобны в сборке, бесшумны и надежны в работе. Основное преимущество планетарных редукторов заключается в том, что они позволяют осуществлять большое передаточное число (отношение) при меньших, чем у рядных механизмов габаритах и обладают достаточно высоким к.п.д.
3.1 Требуемое
передаточное число планетарного
механизма
![]()
![]()
Откуда:
![]()
3.2 Считаем числа зубьев колес
Предположим, что z3=85, тогда
![]()
![]()
Условие соосности
![]()
3.3 Считаем количество сателлитов

к=4,3,2,1.
к=4,3,2,1.
![]()
к=3
к=3
Так как получилось целое число, то условие сборки выполняется.
![]()
Примем z4=12, тогда z5=1,812=22.
3.4 Определяем диаметры начальных окружностей колёс.
![]() ,
,
![]()
![]()
![]()
![]()
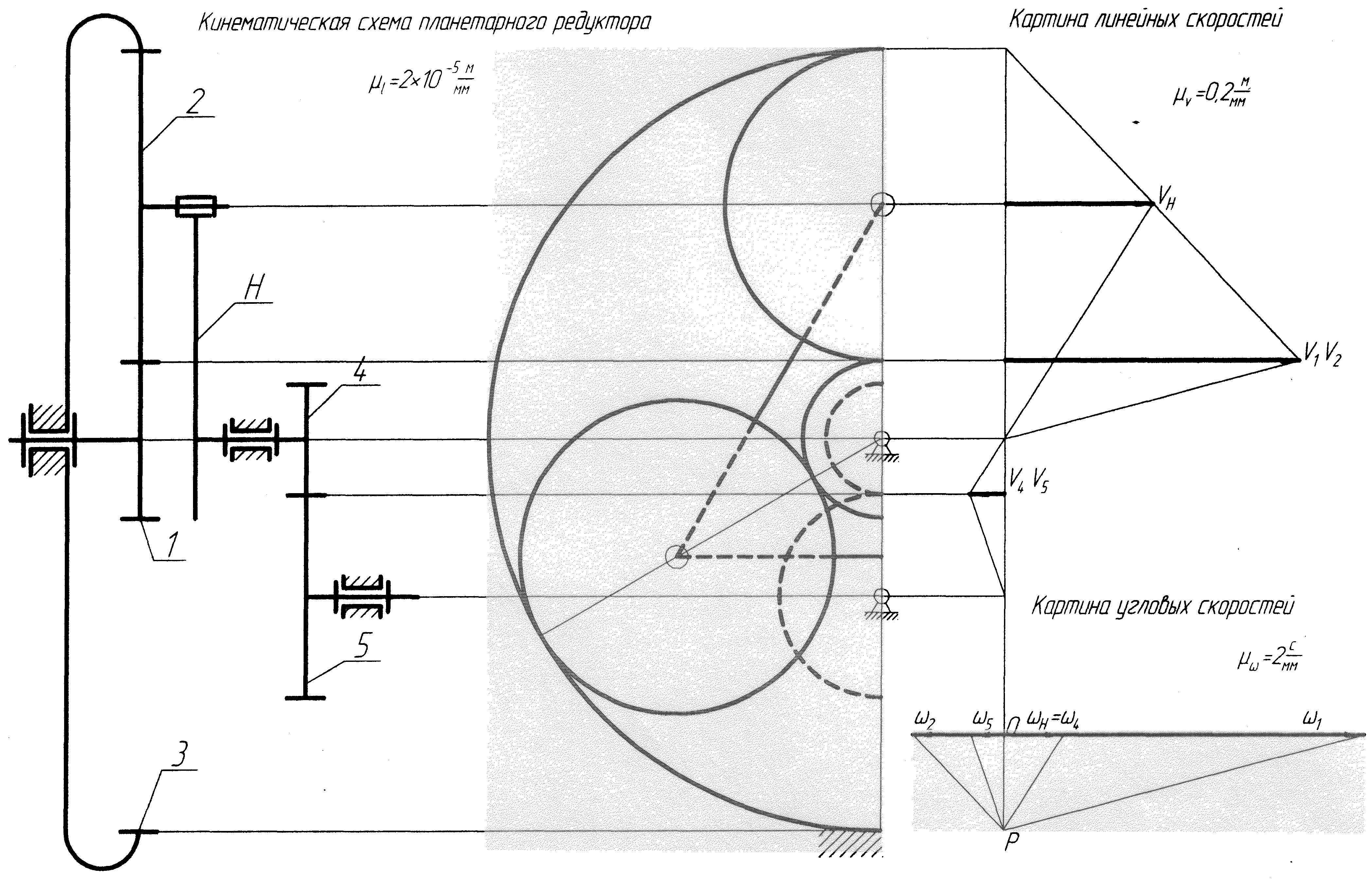
Вычерчиваем схему редуктора, приняв диаметры начальных окружностей колёс 1 и 2
![]() ,
,
![]() .
.
на основании геометрического расчёта. Масштабом построения зададимся из условия размещения схемы на листе
![]() .
.
Далее строим картину линейных скоростей и картину угловых скоростей, приняв масштабные коэффициенты соответственно:
![]() ,
,
![]() .
.
3.5 Проверка передаточного отношения
Полученная погрешность меньше 5%, зубья подобраны правильно.
Рис. 10. Схема планетарного редуктора, картина линейных скоростей, картина угловых скоростей.
Число подвижных звеньев: n=4.
Число кинематических пар V-го класса: p5=4.
Число кинематических пар IV-го класса: p4=3.
Число степеней подвижности механизма (по формуле Чебышева):
![]()
3.6 Считаем угловые скорости зубчатых колес:
![]()
![]()
![]()
![]()
![]()