

-
Выбор регулятора
Приведем сравнительную характеристику регуляторов.
Сравнительная характеристика ЛАЧХ системы с регуляторами и системы без регулятора изображена на рис. 13.

Рис. 14. Сравнительная характеристика ЛАЧХ системы с регуляторами и системы без регулятора.
Сравнительная характеристика реакции на ступенчатое воздействие системы с регуляторами и системы без регулятора изображена на рис. 15.
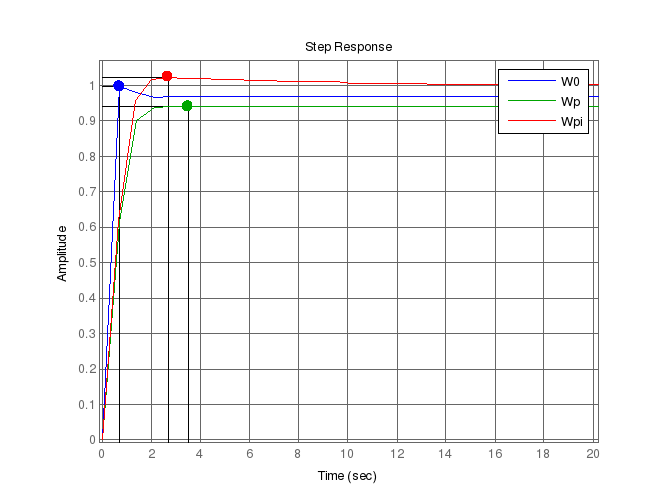
Рис. 15. Сравнительная характеристика реакции на ступенчатое воздействие системы с регуляторами и системы без регулятора.
Сравнительная характеристика ошибок при реакции на ступенчатое воздействие системы с регуляторами и системы без регулятора изображена на рис. 16.

Рис. 16. Сравнительная характеристика ошибок при реакции на ступенчатое воздействие системы с регуляторами и системы без регулятора.
Сведем показатели качества в таблицу для наглядности (Таблица 4).
Таблица 4. Сравнение системы без регулятора, с п-регулятором и пи-регулятором.
|
|
|
|
|
|
|
|
Система без регулятора |
16,4 |
60,2 |
0,62 |
6 |
0,031 |
|
Система с п-регулятором |
22,4 |
76,7 |
1,34 |
0 |
0,06 |
|
Система с пи-регулятором |
22,2 |
71,2 |
1,34 |
2 |
0 |
Из сравнения параметров системы без регулятора, с п-регулятором и пи-регулятором следует, что наилучшим показателям качества системы удовлетворяет пи-регулятор.
-
Моделирование и исследование системы
Проведем моделирование в среде МАТLАВ/SIMULINK. Компьютерная модель системы регулирования представлена на рисунке 17.

Рис. 17. Компьютерная модель системы регулирования.
Компьютерная модель построена на основе математической модели системы. В системе предусмотрены наличие возмущения, нелинейности, различные входные сигналы. Возможен просмотр управляющего сигнала, сигналов ошибки и реакции системы на воздействие.
3.1 Моделирование системы по задающему воздействию
Графики переходных процессов ε(t), у(t), хi(t) на входе НЭ при ступенчатом воздействии представлены на рис. 18.

Рис. 18. Графики переходных процессов ε(t), у(t), хi(t) на входе НЭ при ступенчатом воздействии.
εmax= 1; ymax= 1,02; хimax= 5.
εуст= 0; yуст= 1; хiуст= 0.0016.
Графики переходных процессов ε(t), у(t), хi(t) на входе НЭ при линейно нарастающем воздействии изображены на рис. 19.

Рис. 19. Графики переходных процессов ε(t), у(t), хi(t) на входе НЭ при линейно нарастающем воздействии.
εmax= 0,62; ymax= ∞; хimax= ∞.
εуст= 0,455; yуст= ∞; хiуст= ∞.
Рассчитаем ошибку установившуюся ошибку с использованием теоремы о конечном значении оригинала во временной области.
ПФ разомкнутого контура системы с ПИ-регулятором:
![]()
ПФ задающего линейно нарастающего воздействия в s-области:
![]() ;
;
![]() .
.
Определим изображение переменной ошибки:
![]() ;
;
 ;
;
![]()
![]()
![]() .
.
 .
.
Значение рассчитанной ошибки соответствует значению на графике.