

Содержание
Введение.........................................................................................................................3
-
Задание на курсовое проектирование................................................................3
-
Предварительный расчет ЛСУ...........................................................................5
-
Предварительный расчет параметров ЛСУ...........................................5
-
Выбор элементной базы............................................................................7
-
Анализ системы без регулятора....... .......................................................9
-
П-регулятор..............................................................................................11
-
ПИ-регулятор...........................................................................................13
-
Выбор регулятора....................................................................................17
-
-
Моделирование и исследование системы ......................................................19
-
Моделирование системы по задающему воздействию........................19
-
Моделирование системы по возмущающему воздействию................21
-
Анализ чувствительности ......................................................................23
-
Моделирование системы с нелинейным элементом ...........................26
-
Моделирование системы с учетом запаздывания......................................... 28
-
Заключение.........................................................................................................30
-
Список литературы .....................................................................................................31
Введение
Целью курсового проекта является приобретение практических навыков расчёта и компьютерного моделирования типовых локальных систем автоматического управления (САУ). В данной курсовой работе в качестве примера такой системы приведена система автоматического регулирования разрежения газа в газопламенной печи.
Выполнение курсовой работы делится на два этапа. Первый этап представляет собой предварительный расчет САУ и включает в себя:
-
составление обобщённой структурной схемы объекта регулирования (ОР), с включением в неё регулирующего органа (РО), датчика, измерительного преобразователя и модели возмущения;
-
построение структурной схемы САУ по заданной функциональной схеме;
-
предварительный расчет параметров настройки САУ по заданным показателям качества. В качестве изменяемой части системы выступает типовой ПИ- или ПИД-регулятор.
На втором этапе выполняется компьютерное моделирование САУ:
-
исследуются ее динамические свойства при входных управляющих и возмущающих воздействиях;
-
оценивается влияние нелинейности одного из элементов системы и малых изменений параметров этого элемента относительно расчетных значений на показатели качества системы;
-
уточняются параметры настроек регулятора (“вторичная” оптимизация ЛСУ);
-
анализ результатов расчёта и моделирования.
-
Задание на курсовое проектирование
Описание системы:
Объект регулирования (ОР): магистраль газопровода (топливная магистраль). Регулируемая величина y: расход газа Q [м3 /с], измеряемый с помощью диафрагмы Д (рис.1, поз.а) и датчика расхода FT. С помощью автоматического регистрирующего устройства FIR осуществляется индикация и запись величины расхода Q.
Систему измерения расхода газа
необходимо дополнить системой
автоматического регулирования (рис.1.1,
поз.б) и рассчитать параметры
регулятора. Информация о перепаде
давления с диафрагмы 001 поступает
на датчик разности давления
![]() 010 и с его выхода в виде
унифицированного токового сигнала I
поступает на коренатор 015.
Выходной сигнал коренатора, пропорциональный
расходу Q, подается на регистрирующий
автоматический потенциометр 031 и
дифференциатор 040. С выхода
дифференциатора сигнал поступает на
вход регулятора 050. Регулятор
выдает сигнал управления
на электропневматический серводвигатель
EPS 060, с помощью которого измеряется
проходное сечение регулирующего вентиля
070 (регулирующего органа системы).
Все устройства системы питаются от
источника 012 (пунктирные линии) и
трансформатора 011.
010 и с его выхода в виде
унифицированного токового сигнала I
поступает на коренатор 015.
Выходной сигнал коренатора, пропорциональный
расходу Q, подается на регистрирующий
автоматический потенциометр 031 и
дифференциатор 040. С выхода
дифференциатора сигнал поступает на
вход регулятора 050. Регулятор
выдает сигнал управления
на электропневматический серводвигатель
EPS 060, с помощью которого измеряется
проходное сечение регулирующего вентиля
070 (регулирующего органа системы).
Все устройства системы питаются от
источника 012 (пунктирные линии) и
трансформатора 011.

Рис. 1. Система автоматического регулирования
Исходные данные для расчета системы приведены в табл.1.
Таблица 1. Исходные данные для расчета системы.
|
Позиция |
Элементы системы |
Передаточные функции |
Параметры |
|
000 |
Топливная магистраль (ОР) |
|
|
|
001 |
Диафрагма (Д) |
|
|
|
010 |
Датчик разности давлений |
|
|
|
015 |
Коренатор |
|
|
|
Позиция |
Элементы системы |
Передаточные функции |
Параметры |
|
040 |
Дифференциатор (P) |
|
|
|
050 |
Регулятор (R) |
1. П-регулятор
2. ПИ-регулятор
|
|
|
060 |
Серводвигатель (EPS) |
|
|
|
070 |
Регулирующий орган (РВ) |
|
|

-
Предварительный расчет лсу
-
Предварительный расчет параметров лсу.
Структурная схема системы представлена на рис. 2.
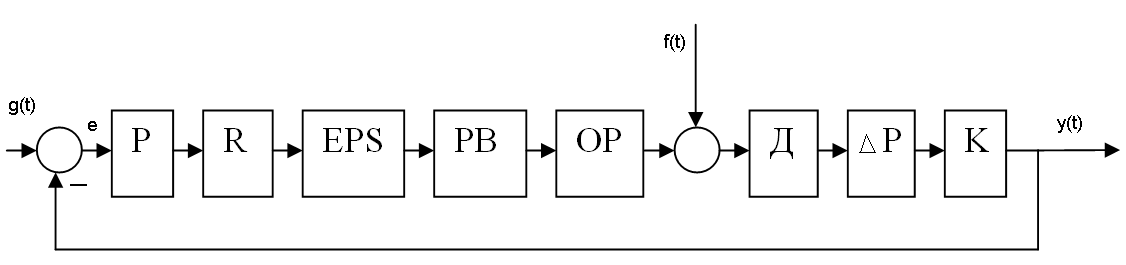
Рис. 2. Структурная схема системы регулирования.
Обозначения принятые на схеме:
Р – дифференциатор;
R – регулятор;
EPS – серводвигатель;
РВ – регулирующий вентиль;
ОР – объект регулирования (топливная магистраль);
Д – диафрагма;
∆P – датчик разности давлений;
K - коренатор.
На основе структурной схемы построим математическую модель системы регулирования, которая изображена на рис. 3.

Рис. 3. Математическая модель системы регулирования.
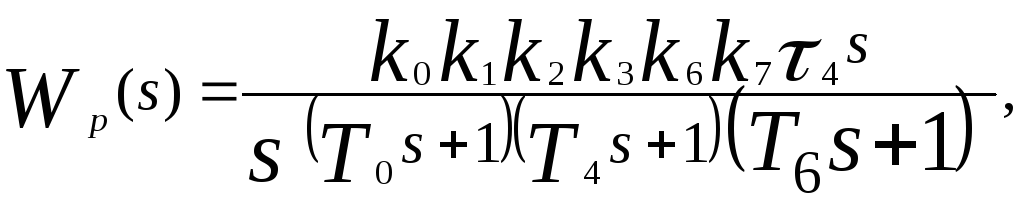
Передаточная функция разомкнутой системы Wp(s) в общем виде:
Передаточная функция замкнутой системы Wз(s)в общем виде:
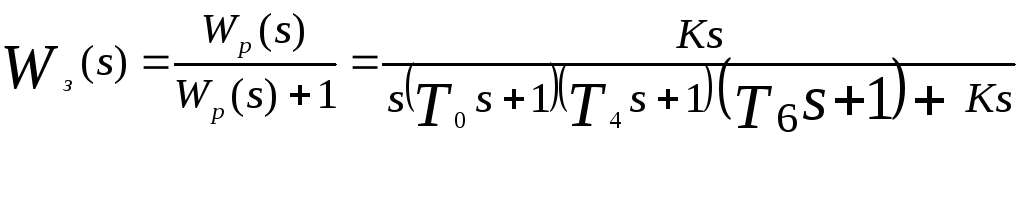 , где
, где
![]()
Переведем параметры диафрагмы в систему СИ.
![]() =
=![]()
Выбор постоянных времени проводим с учетом того, что еще на этапе построения будем стремиться к хорошим показателям качества. Следовательно, постоянные времени должны быть маленькими. Проведя ряд экспериментов по варьированию постоянных времени, убеждаемся, что увеличение постоянной времени ОР Т0 и уменьшение постоянных времени Т4 и Т6 ведет к увеличению критического коэффициента усиления. Большой коэффициент усиления позволит снизить ошибки в системе.
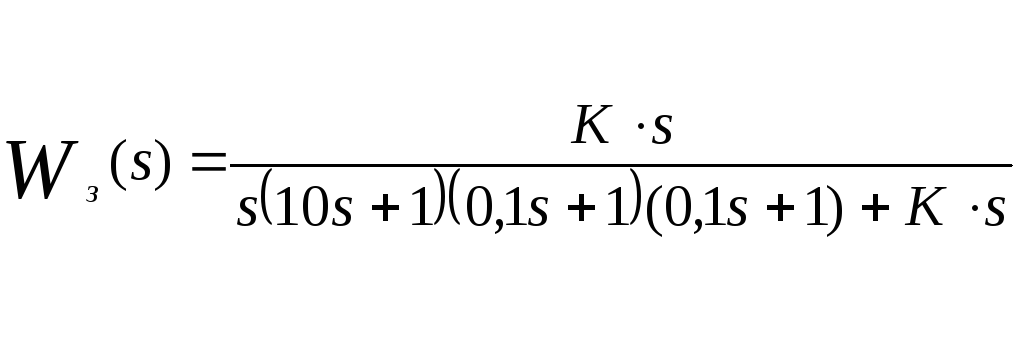
С учетом выбора постоянных времени запишем:
 ,
где
,
где
![]()
 ,
где
,
где
![]()
Для выбора элементной базы необходимо найти критический коэффициент усиления, при котором система находится на границе устойчивости.
По критерию Гурвица для устойчивости системы четвертого порядка требуется выполнение следующих условий:
1. Все коэффициенты характеристического уравнения должны быть положительными.
2.
Должно быть справедливо неравенство
![]() ,
где
,
где
![]() коэффициенты при степенях характеристического
полинома.
коэффициенты при степенях характеристического
полинома.
ХП замкнутой системы:
![]()
![]()
Решив неравенство получим:
К<204
Ккр=204
Значение К большое, благодаря чему существует запас по усилению и замкнутая система будет устойчива даже при сильных вариациях коэффициентов усиления. Следовательно, что выбранные постоянные времени нам подходят.