

2.2.1. Определение положений
План положений механизма – это графическое изображение взаимного расположения звеньев, соответствующее выбранному расчетному положению начального звена.
План положений
механизма для угла
=
показан на рис.
2.1. Масштабный коэффициент плана положений
![]() определяется как
определяется как
![]() (2.22)
(2.22)
где
![]() - действительная длина звена 1;
- действительная длина звена 1;
![]() - длина отрезка, изображающего звено 1
на плане положений.
- длина отрезка, изображающего звено 1
на плане положений.
Тогда отрезок
![]() ,
соответствующий длине звена 2, будет
,
соответствующий длине звена 2, будет
![]() (2.23)
(2.23)
План положений
позволяет определить угол
и координаты точек
![]() и
:
и
:
![]() (2.24)
(2.24)
Для рассматриваемого примера численные значения приведенных параметров будут следующие:
![]() м/мм;
м/мм;
![]() мм;
мм;
![]() ;
;![]() м;
м;
![]() м;
м;
![]() м.
м.
Значения
![]() ,
,
![]() ,
,
![]() ,
,
![]() с большой степенью точности приближены
к значениям, полученным аналитическим
способом.
с большой степенью точности приближены
к значениям, полученным аналитическим
способом.
2.2.2. Определение скоростей
Метод основан на
графическом решении векторных уравнений
движения. Для построения плана скоростей
должна быть известна кинематическая
схема механизма, построенная в масштабе
(рис. 2.2, а), и задан закон движения
начального звена (например,
![]() ).
).
Требуется найти
линейные скорости точек
![]() ,
и
,
а также угловую скорость звена 2.
,
и
,
а также угловую скорость звена 2.
Построение плана скоростей начинается с определения скорости точки кривошипа
![]() (2.25)
(2.25)
Вектор скорости
точки
направлен перпендикулярно кривошипу
![]() в направлении его вращения.
в направлении его вращения.
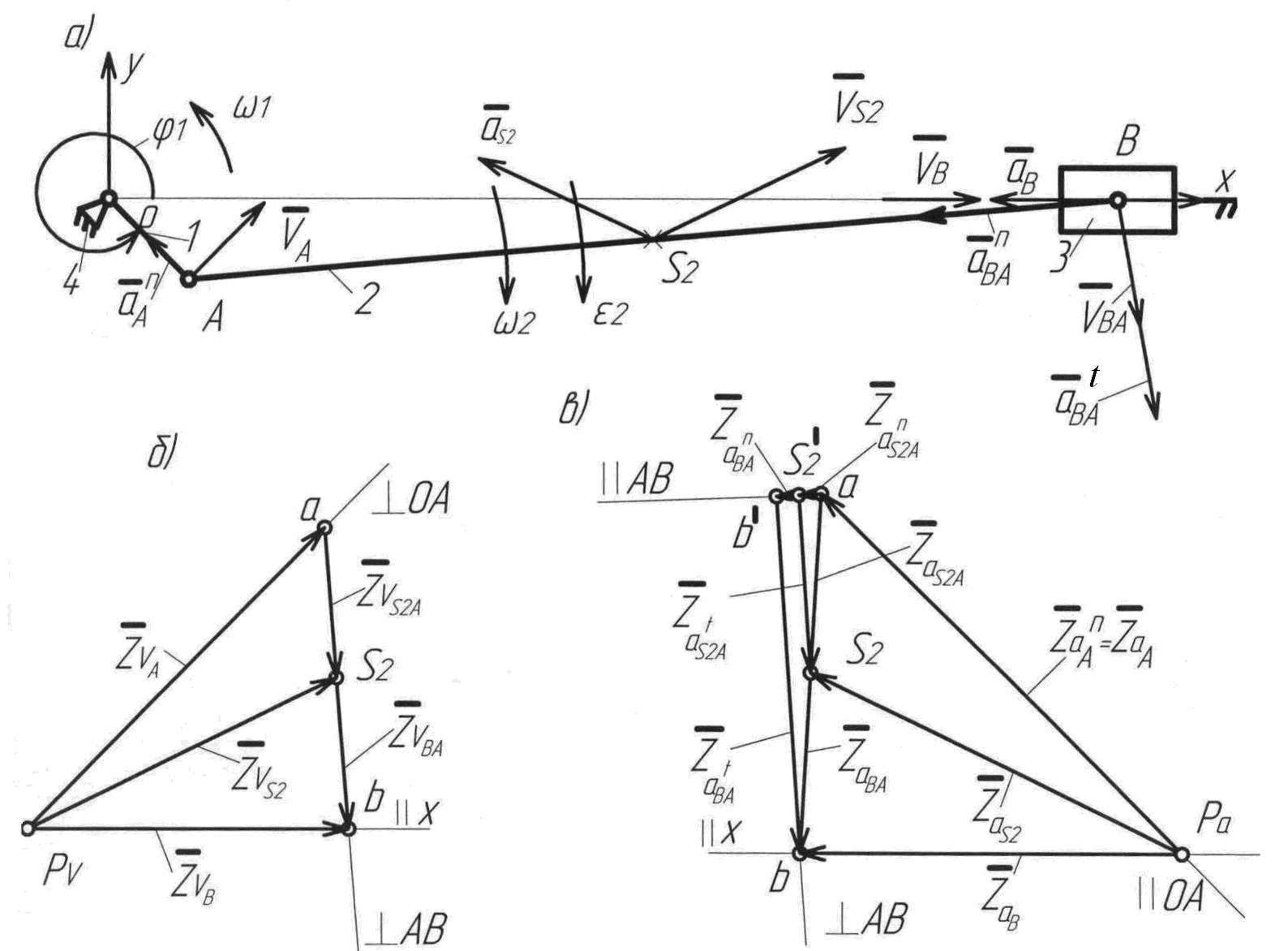
Рис.2.2. Схема механизма, планы скоростей и ускорений
Скорость точки
,
принадлежащей звену 2, можно представить
как векторную сумму скоростей переносного
![]() и относительного
и относительного
![]() движений
движений
![]() (2.26)
(2.26)
Переносным движением звена 2 является поступательное движение его со скоростью точки
![]()
а относительным
– вращательное движение звена 2 вокруг
точки А. Если обозначить относительную
скорость через
![]() ,
то
,
то
![]()
Окончательно векторное уравнение для скорости точки В будет иметь вид
![]() (2.27)
(2.27)
В этом уравнении векторы скоростей, известные по величине и направлению, подчеркнуты двумя чертами, а известные лишь по направлению – одной чертой.
Для определения
указанных неизвестных величин строим
план скоростей с выбранным масштабным
коэффициентом
![]()
 (2.28)
(2.28)
Здесь
![]() - длина отрезка,
изображающего на плане скорость
- длина отрезка,
изображающего на плане скорость
![]() .
.
Из произвольной
точки полюса плана скоростей
![]() (рис. 2.2, б) проведем вектор
,
перпендикулярный кривошипу ОА,
соответствующий на плане скоростей
абсолютной скорости
(рис. 2.2, б) проведем вектор
,
перпендикулярный кривошипу ОА,
соответствующий на плане скоростей
абсолютной скорости
![]() .
Из конца вектора
(точка а) проводим линию в направлении
относительной скорости
.
Из конца вектора
(точка а) проводим линию в направлении
относительной скорости
![]() ,
перпендикулярную
,
перпендикулярную
![]() ,
а из полюса
- линию в направлении скорости
,
а из полюса
- линию в направлении скорости
![]() ,
параллельную
,
параллельную
![]() .
В пересечении указанных линий находим
точку b. Вектор
.
В пересечении указанных линий находим
точку b. Вектор
![]() изображает скорость
точки В, а вектор
изображает скорость
точки В, а вектор
![]() - скорость
.
Величины действительных скоростей
определяют по формулам
- скорость
.
Величины действительных скоростей
определяют по формулам
![]()
Направление
скорости
![]() определяется при параллельном переносе
вектора
в точку В механизма (рис. 2.2, а).
Т.к. вектор
в точке В механизма направлен в сторону
положительной полуоси
,
знак скорости
будет положительным.
определяется при параллельном переносе
вектора
в точку В механизма (рис. 2.2, а).
Т.к. вектор
в точке В механизма направлен в сторону
положительной полуоси
,
знак скорости
будет положительным.
Модуль угловой скорости звена 2 будет
![]() (2.29)
(2.29)
Направление
![]() находится по вектору
находится по вектору
![]() .
На рис. 2.2, а
направлена по часовой стрелке.
.
На рис. 2.2, а
направлена по часовой стрелке.
Скорость точки определяется с помощью векторного уравнения:
![]() (2.30)
(2.30)
![]()
Здесь скорость
относительного движения точки
![]() находится методом пропорционального
деления отрезка ав
на плане скоростей, изображающего
относительную скорость
находится методом пропорционального
деления отрезка ав
на плане скоростей, изображающего
относительную скорость
![]()
![]() (2.31)
(2.31)
Действительная скорость определяется как
![]() (2.32)
(2.32)
Для рассматриваемого
примера численное значение скорости
![]() равно
равно
![]() =12,56*0,175=2,198
м/с
=12,56*0,175=2,198
м/с
![]() 2,2 м/с.
2,2 м/с.
Если на плане
скоростей (рис.2.2,б) известную скорость
![]() изобразить отрезком длиной 66 мм, то
получим:
изобразить отрезком длиной 66 мм, то
получим:
 =51
мм;
=47
мм;
=51
мм;
=47
мм;
![]() м/с.
м/с.
Так как вектор в точке В механизма направлен в сторону положительной полуоси ,знак будет положительным:
=1,7 м/с
![]() м/с;
м/с;
![]()
![]() .
.
Угловая скорость направлена по часовой стрелке, поэтому имеет знак «минус»:
![]() 1/с;
1/с;
![]() мм;
мм;
![]() м/с.
м/с.
Сравнение с результатами аналитического метода расчета дает ошибку не более 3%.