

2.4 Контрольные вопросы
1. Области применения терморезисторов.
2. Металлические терморезисторы, особенности, применение.
3. Полупроводниковые терморезисторы.
4. Что такое температурный коэффициент сопротивления?
5. Статическая характеристика металлических терморезисторов.
6. Статическая характеристика полупроводниковых терморезисторов.
7. Вольтамперная характеристика терморезисторов.
8. Пример конкретного использования терморезистора в устройствах автоматики
контроля.
9. Использование терморезисторов для термоанемометров.
10. Использование терморезисторов в схемах температурной компенсации .
11. Экспериментальные определения постоянных коэффициентов для аналитического выражения
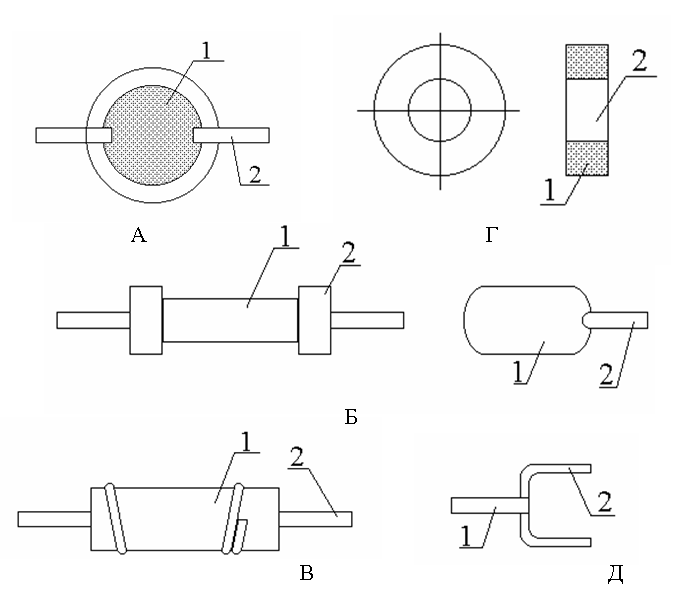
Рис. 2.4 Типичная конструкция терморезистора:
А – бусинковый, Б,В – стерженьковые,
Г – шайбовые, Д – таблеточный.
1 – Рабочее тело, 2 – выводы.
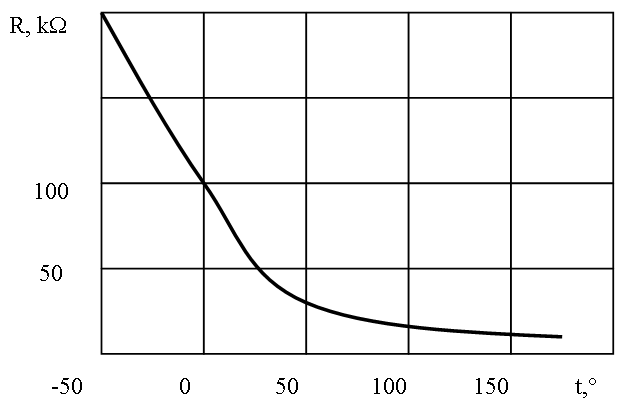
Рис. 2.5 Температурная (статическая) характеристика термистора

А) Вольтамперные характеристики терморезисторов типа ММТ-1 (I), ММТ-4 (II)
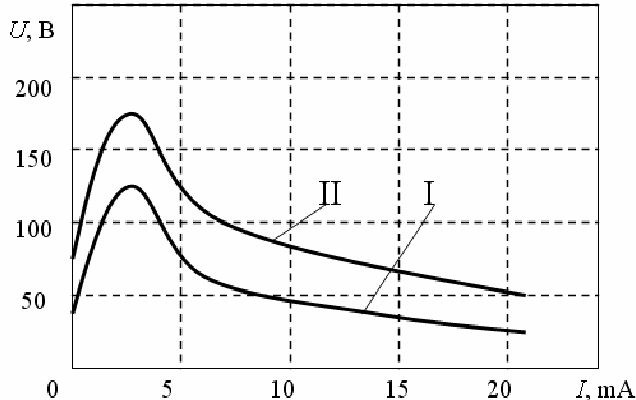
Б) Вольтамперные характеристики терморезисторов типа КМТ-1 (I), КМТ-4 (II)
Рис 2.6 Вольтамперные характеристики терморезисторов различных модификаций
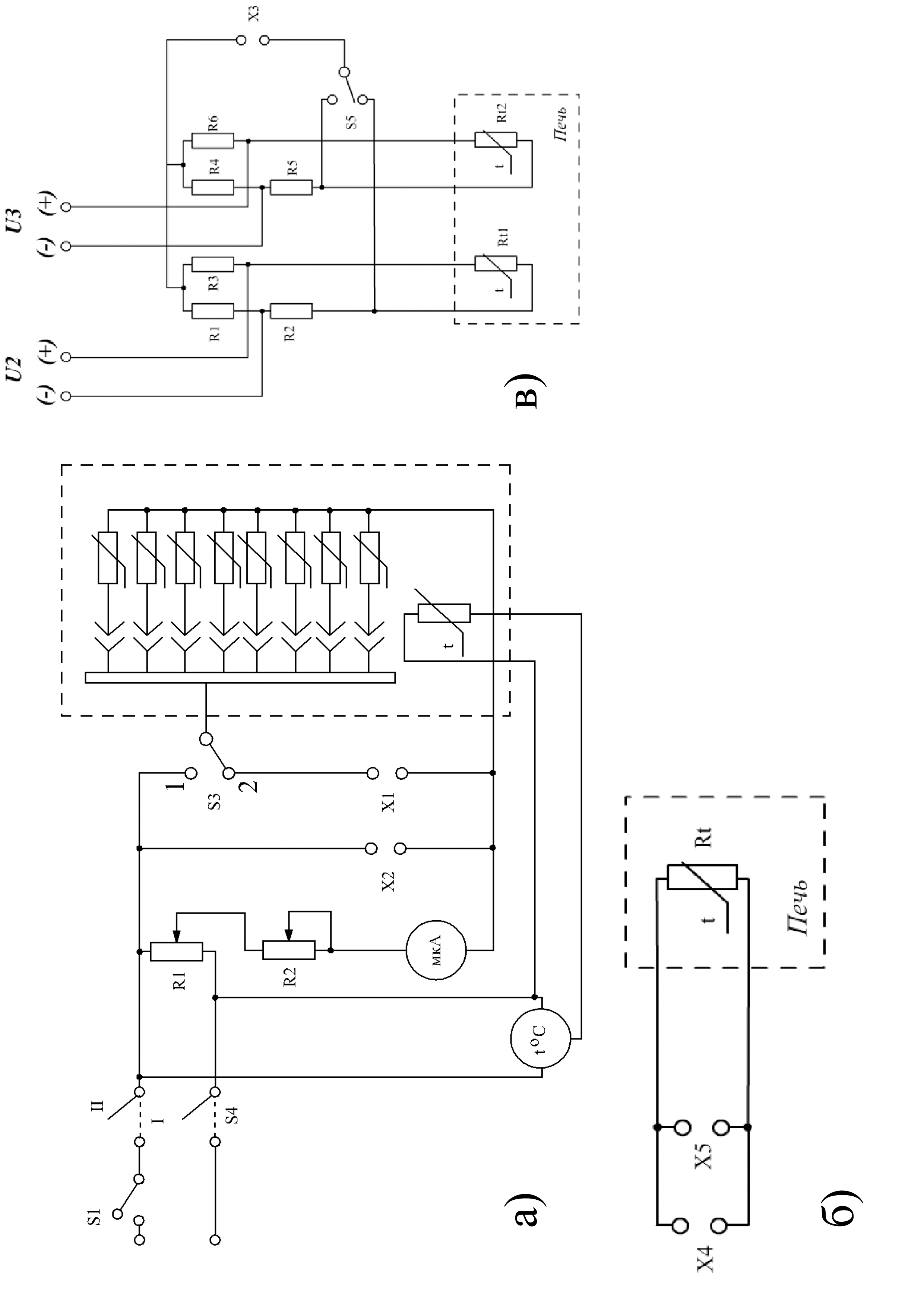
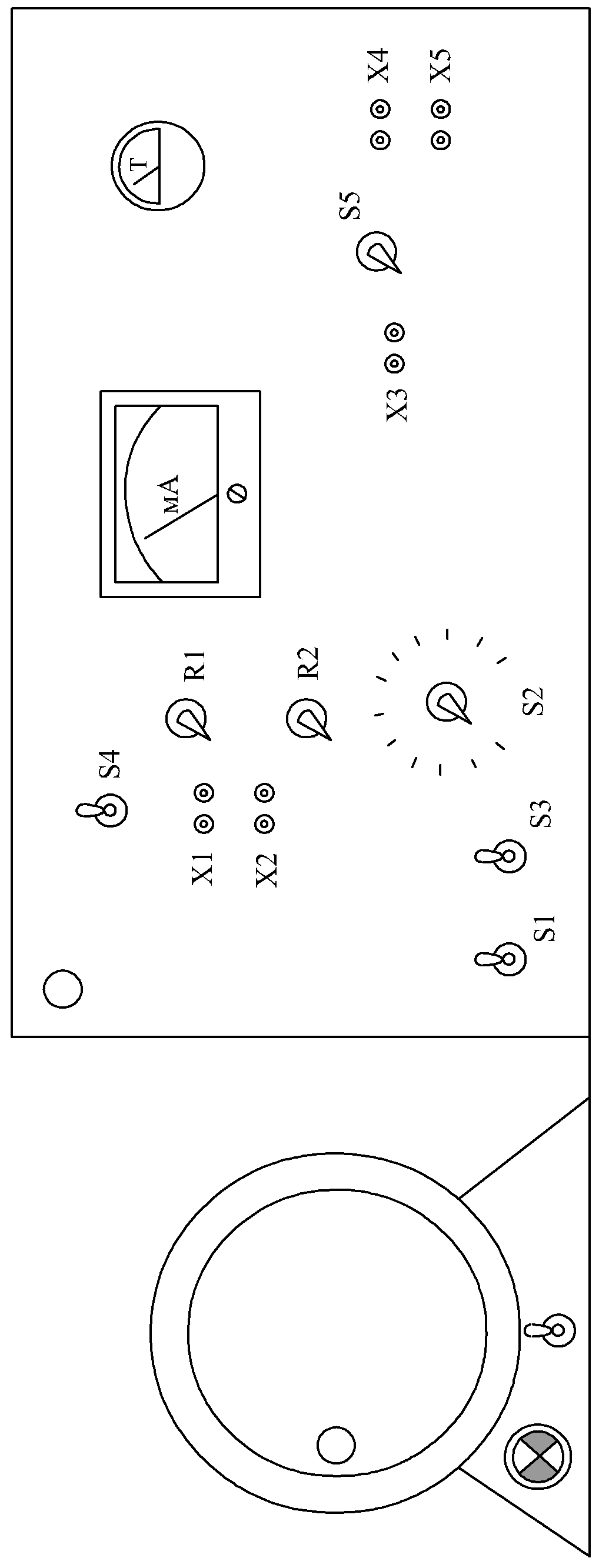
Рис. 2.7 Электрическая принципиальная схема стенда:
|
|
Рис 2.8 Лабораторный стенд «Исследование
полупроводниковых терморезисторов»
|
Лабораторная работа № 3
Исследование индуктивных измерительных преобразователей.
3.1 Цель работы
Целью лабораторной работы является: изучение принципа действия, схем и конструкций индуктивных преобразователей механических перемещений (угловых и линейных); экспериментальные исследования основных характеристик индуктивных преобразователей.
3.2 Общие сведения
Индуктивные преобразователи (ИП) относятся к классу параметрических [2, 6, 7]. Используются в системах автоматики в качестве датчиков перемещений (угловых и линейных), в дефектоскопии, для контроля расхода жидкостей и газов. В авиаприборостроении индуктивные преобразователи перемещения находят широкое применение в датчиках высоты и скорости, корректорах высоты. Используются также в системах измерения воздушных параметров полета [8].
Широкое применение преобразователей объясняется: простотой конструкции, надежностью в работе, возможностью подключения к источникам промышленной частоты, достаточно большой мощностью выходного сигнала, значительной чувствительностью.
К недостаткам следует отнести влияние колебаний частоты питающего напряжения.
Принципы действия ИП заключаются в изменении индуктивности при перемещении подвижного элемента (якоря) за счет изменения сопротивления магнитной цепи.
Конструктивно различают ИП с переменной шириной зазора, соленоидные (плунжерные), трансформаторные.
Основные характеристики ИП:
Рабочий диапазон ИП;
Чувствительность (коэффициент передачи);
Зона чувствительности;
Выходная мощность.
Схема простейшего индуктивного преобразователя приведена на рис. 3.1. Якорь 1 и магнитопровод 2 образуют магнитную цепь преобразователя с переменным зазором X. Входной параметр преобразователя – перемещение якоря (величина зазора X); выходной параметр - напряжение Uвых, снимаемое с сопротивления нагрузки RН.
Величина напряжения Uвых равна [6]:
![]() (3.1)
(3.1)
где:
U~ – напряжение
питания; Rдр –
сопротивление нагрузки; rдр
– активная составляющая сопротивления
катушки; L – индуктивность
катушки;
![]() –
круговая частота, RH
– сопротивление нагрузки.
–
круговая частота, RH
– сопротивление нагрузки.
Для большинства конструкций индуктивных преобразователей характерно выполнение условия:
(Rн + rдр)>> L (3.2)
Индуктивность катушки определяется по формуле:
![]() (3.3)
(3.3)
где: 0 = 410-7 Гн/м – магнитная постоянная; S – площадь сечения магнитопровода; W – количество витков обмотки; 2Х – величина зазоров, соответствующая перемещению якоря; S0 – чувствительность индуктивного преобразователя.
Выражение (2.3.) получено на основе следующих допущений: сопротивление магнитопровода пренебрежимо мало по сравнению с сопротивлением зазора; потери на гистерезис и вихревые токи пренебрежимо малы.
С учетом (2.2.) и (2.3.) можно записать:
![]() (3.4.)
(3.4.)
где
![]() - чувствительность ИП.
- чувствительность ИП.
Выражение (3.4.) используется для построения статической характеристики преобразователя. На рис. 3.2 приведена схема простейшего индуктивного преобразователя с выходом на постоянном токе.
На рис. 3.3 изображена идеальная (расчетная, 1) и реальная (экспериментальная, 2) характеристики ИП.
Простейшие преобразователи имеют ряд существенных недостатков: нелинейность реальной статической характеристики; наличие напряжения холостого хода при нулевом положении якоря.
Особо следует отметить нереверсивность статической характеристики, которая проявляется в отсутствии зависимости фазы выходного сигнала от направления перемещения. Этот недостаток не позволяет использовать такие ИП в системах автоматики.
Реверсивные преобразователи представляют совокупность двух нереверсивных с общим якорем (рис 3.4). Статическая характеристика (рис. 3.6) построена путем алгебраического суммирования ординат выходных характеристик каждого из нереверсивных ИП (1 и 2). Из рисунка видно, что при изменении направления перемещения якоря изменяется фаза выходного сигнала.
Датчик соленоидного типа (рис. 3.5) используют для измерения больших перемещений. Это позволяет применять его, например, в цепи обратной связи автопилотов. Якорь может быть связан с рулевой тягой самолета для выдачи сигнала в цепь обратной связи.
Принцип действия трансформаторных индукционных преобразователей (рис. 3.7, рис 3.8) основан на использовании изменения взаимной индуктивности между входными обмотками W1 и выходными W2 при перемещении подвижного якоря.
В лабораторной работе исследуются два индуктивных преобразователя: дифференциальный с поворотным якорем и дифференциальный с изменением площади перекрытия полюсов магнитопровода.