

Лабораторная работа № 2 Радиолокационные сканирования профиля поверхности материала
Цель: Определить профиль поверхности материала.
Теоретические сведения
Принципиально новые возможности контроля процессов, происходящих в металлургических агрегатах, открываются при сканировании радиолучом рельефа сложной поверхности сыпучего материала. Например, можно получить профиль насыпи шихты на колошнике доменной печи.
Исследования на натурных стендовых установках показали, что для основных шихтовых материалов доменного производства (кокса, агломерата, железорудных окатышей) отраженный сигнал устойчиво регистрируется даже при больших углах падения радиоволн, а отличие от истинного профиля определяется практически только размерами кусков материала.
На учебно-опытном стенде радиолокационного зондирования можно выполнять сканирование поверхности имитатора насыпи материалов. С помощью электропривода РДУ может отклоняться от вертикали на угол до 38 градусов.
Тумблер «ПОВОРОТ» включения электропривода находится на щите возле рабочего места.
Ход выполнения работы
1. Проведите 10 измерений расстояния до поверхности насыпи, поворачивая радиолокатор каждый раз на угол около 4 градусов. Примечание: Для определения угла поворота следует показания прибора умножить на 1,40.
2. Используя лазерный указатель, убедитесь, что луч радиолокатора направлен на поверхность насыпи. Снимите с видеокадра данные по расстоянию (дальности) D (м).
3. Полученные данные занесите в таблицы 6.1 и 6.2.
Таблица 6.1
Данные сканирования профиля поверхности
№ опыта |
Угол поворота α, град |
Расстояние D, м |
1 |
4 |
|
2 |
8 |
|
3 |
12 |
|
4 |
16 |
|
5 |
20 |
|
6 |
24 |
|
7 |
28 |
|
8 |
32 |
|
9 |
36 |
|
10 |
38 |
|
4. Для того, чтобы построить профиль засыпки материала, необходимо вычислить ординаты Hрі и абсциссы Xрі зондируемой точек поверхности.
Р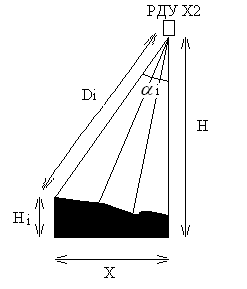 ис
6.1 - Измерение расстояния во время
поворота радара
ис
6.1 - Измерение расстояния во время
поворота радара
На Рис 6.1 изображена схема измерения. Величины Хi и Hi определите по следующим формулам и результаты занесите в таблицу 6.2.
Xрi = sin(αi) · Di ; (15)
Hрi = H – cos(αi) · Di , (16)
где H - высота установки радара относительно пола;
αi - угол поворота радара;
Di - расстояние, измеряемое радаром.
5. Для проверки полученных данных постройте профили поверхности по данным радиолокационного зондирования и метрических измерений (табл. 6.2).
Таблица 6.2
Построение профиля поверхности
№ опыта |
Радиолокационный профиль |
Метрический профиль |
||
Xрi |
Hрi |
Xмi |
Hмi |
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
7 |
|
|
|
|
8 |
|
|
|
|
9 |
|
|
|
|
10 |
|
|
|
|
6. Сделайте выводы.
Контрольные вопросы:
1. Как влияет состояние поверхности на измерение расстояния до объекта?
2. Какая погрешность измерения неровной поверхности РДУ-Х2?
3. Как влияет пыль на измерения радиолокатором?