

2.1.1. Алгоритмы автоматического регулирования
Под алгоритмом автоматического регулирования частоты вращения понимается аналитическая зависимость между положением регулировочного элемента направляющего аппарата, гидравлической или регулировочных клапанов паровой турбин и отклонением частоты вращения от предписанной Δω =ωпр-ω.
Способностью поддерживать регулируемый параметр — частоту вращения на неизменном уровне — обладает астатический регулятор (характеристика регулирования 1 — зависимость частоты вращения ω от мощности нагрузки Р на рис. 2.1). Он функционирует по интегральному (И), пропорционально интегральному (ПИ) или пронорционально- интегрально-дифференциальному (ПИД) алгоритмам автоматического регулирования. Интегрирование отклонения частоты вращения Δω; обеспечивает изменение состояния регулировочного элемента турбины н фиксирование его изменившегося состояния после исчезновения Δω . Этим и обеспечивается астатическая характеристика регулирования.
Рис.
3.1.
Характеристики регулирования: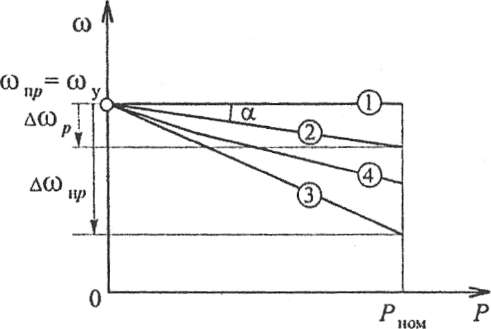
1
— астатическая; 2 — статическая; 3 —
характеристика при отсутствии
автоматического регулирования;
4
— с изменяемым статизмом
Однако в процессе разворота турбины и подготовки генератора к синхронизации и для необходимого взаимодействия с автоматическим регулятором активной мощности АРЧВ должен обеспечивать статическую характеристику регулирования 2. Статическим является регулятор, функционирующий на основе пропорционального (П) или пропорционально-дифференциального (ПД) алгоритмов регулирования. Пропорциональная зависимость между положением регулировочного элемента турбины и отклонением частоты вращения Δω означает невозможность полного устранения возникшего ∆ω,
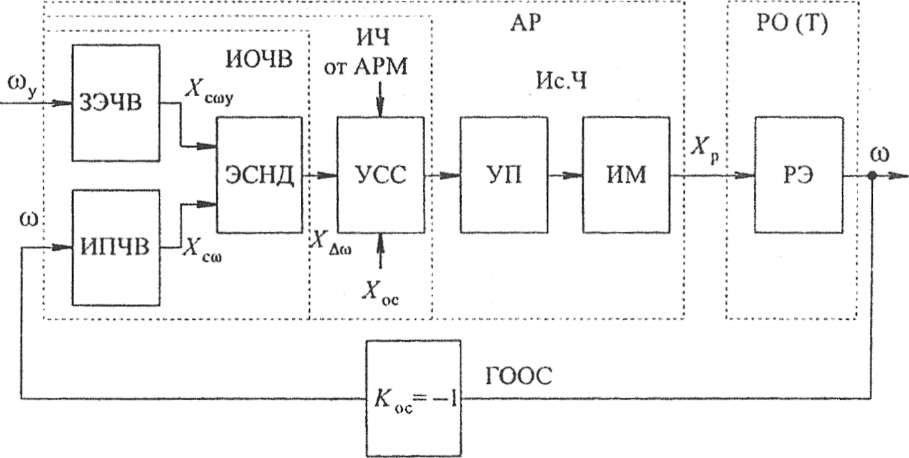
Рис 2.2. Функциональная схема АСРЧВ
поскольку именно его отличие от нуля (Δω ≠ 0) определяет изменение состояния регулировочного элемента. Поэтому, если исчезает отклонение частоты вращения, то регулировочный элемент возвращается в исходное состояние. Статический регулятор может лишь уменьшить отклонение частоты вращения Δωнр которое было бы при отсутствии регулирования (характеристика 3), до остаточного отклонения Δωр во много раз меньшего. Относительное остаточное отклонение частоты вращения определяет наклон характеристики регулирования, характеризуемой коэффициентом статизма.
Кст=tgα=
Ваимодействующая совокупность автоматического регулятора АР (рис. 2.2) и регулируемого объекта, РО — турбины генератора Т представляет собой автоматическую систему регулирования частоты вращения (АСРЧВ). Она функционирует как замкнутая главной жесткой отрицательной обратной связью ГООС, реализуемой безынерционным звеном (ценпью) с коэффициентом передачи Ко.с=-1
Автоматический регулятор АР в функциональной схеме АСРЧВ представляется измерительной частью ИЧ, содержащей измерительный орган частоты вращения ИОЧВ. Он, и свою очередь, состоит из элемента сравнения непрерывного действия ЭСНД сигнала о частоте вращения Хcω формируемого ее измерительным преобразователем ИПЧВ, и сигнала Хcωy о ее предписанном (установленном) задающим элементом ЗЭЧВ значении ωпр и усилителя-сумматора УСС сигналов ХΔω , местной отрицательной обратной связи Xo.c и от АРМ. Исполнительная часть Ис.Ч состоит из усилителя-преобразователя УП и исполнительного элемента (механизма) ИМ. При этом в составе РО выделяется элемент, воспринимающий регулирующее воздействие Хр регулятора на турбину, обычно называемый регулировочным РЭ, — направляющий аппарат гидротурбины или регулирующие клапаны паровой турбины.
Алгоритм автоматического регулирования реализуется синтезом структурной схемы АСРЧВ, состоящей из типовых звеньев, различающихся по их передаточным функциям, двумя способами: параллельным и последовательным их соединением и цени прямой связи (см. рис. 2.4); охватом последовательно соединенных звеньев функциональной , т.е. содержащей одно из типовых структурных звеньев, местной отрицательной обратной связью (см. рис. 2.5) .
При первом способе алгоритм регулирования и способ воздействия на регулировочный элемент турбины зависят от динамических свойств исполнительного элемента регулятора. Применяются исполнительные механизмы двух типов:
с гидравлическим (масляным) усилителем, или с гидравлическим двигателем;
с электрическим двигателем и механическим редуктором.
Автоматический регулятор с гидравлическим исполнительным механизмом воздействует на регулировочный элемент турбины непрерывно, что и свойственно автоматическим управляющим устройствам с непрерывной характеристикой (рис. 2.3,а).
Особенность электродвигательного исполнительного механизма — постоянная скорость его движения, обусловливает возможность практической реализации алгоритмов автоматического регулирования только при дискретном (импульсном) воздействии на электродвигатель — его включении и отключении [4]. Такое воздействие достигается простейшим аналого-дискретным преобразованием сигнала измерительной
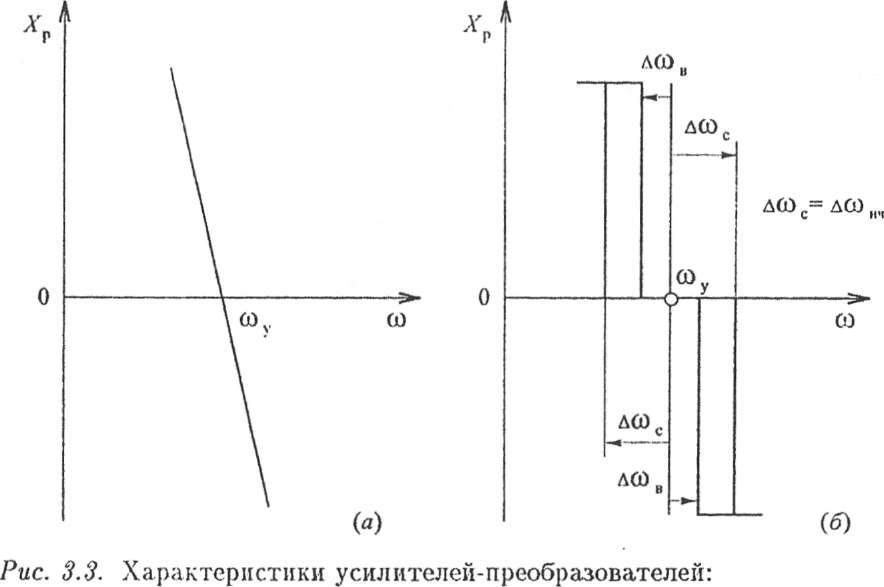
а — непрерывная; б — релейная
части — релейным усилителем-преобразователем УП (см. рис. 2.2) регулятора двухстороннего действия. Автоматический регулятор имеет релейную характеристику (рис. 2.3,б) и обычно называется релейно- импульсным или позиционным [6]. Он характеризуется зоной нечувствительности, т.е. не реагирует на отклонения частоты вращения Δωнч, определяемой частотой срабатывания | ± ω| релейного элемента.
Исполнительный элемент оказывает влияние на алгоритм автоматического регулирования:
- при гидравлическом усилителе, замещаемом апериодическим структурным звеном с передаточной функцией Н(р)≈1/(рТα+1), реализуем любой из названных алгоритмов непрерывного регулирования;
- при гидравлическом двигателе, движение которого описывается передаточной функцией интегрирующего звена Н(р)≈1/рТи, регулирование ограничивается только ПИ пли ПИД алгоритмами непрерывного регулирования.
Указанными (ПИ и ПИД) алгоритмами ограничивается и функционирование автоматических регуляторов дискретного действия (позиционных) с электродвигательным исполнительным механизмом. Устойчивое функционирование позиционного регулятора возможно только при динамических свойствах релейного усилителя-преобразователя, характерных для типового интегрирующего структурного звена [6].
Достаточное для практики приближение к передаточной функции интегрирующего звена достигается охватом релейного усилителя- преобразователя функциональной отрицательной обратной связью, реализуемой апериодическим звеном [6].
Сигнал отрицательной обратной связи в виде экспоненциально нарастающего напряжения Uo.c после срабатывания УП и пуска электродвигателя возвращает его и отключает электродвигатель гораздо раньше момента снижения напряжения на выходе УСС (см. рис. 2.2) до напряжения возврата Uн ~ ΔωB (см. рис. 2.3,б) релейного элемента. 3а. счет экспоненциально убывающего напряжения Uo.c после возврата релейного элемента он снова срабатывает. Таким образом, непрерывное дискретное воздействие релейного элемента на электродвигатель превращается во времяимпульсное. Причем относительная длительность включенного состояния электродвигателя с каждым срабатыванием релейного элемента уменьшается. Периодически включаемый на все меньшее время электродвигатель постепенно подводит регулировочный элемент турбины к новому установившемуся состоянию, соответствующему практическому (в пределах Δωнч) исчезновению Δω.
Таким образом, благодаря указанной обратной связи, не допускается неизбежно возникшее перерегулирование и, как результат, автоколебательное, т.е. неустойчивое, состояние АСРЧВ.
На рис. 2.4,а-в приведены структурные схемы, реализующие формируемые по первому способу алгоритмы автоматического регулирования И-, ПИ-, ПИД-регуляторов соответственно. Передаточные функции АСРЧВ в разомкнутом состоянии определяются перемножением передаточных функций последовательно и сложением параллельно соединенных структурных звеньев, включая и турбину с передаточной функцией Нг(р). При замещении для простоты относительно малоинерционного измерительного преобразователя частоты ИПЧВ (см. рис. 2.2) и элемента сравнения ЭСНД безынерционными звеньями с единичным коэффициентом передачи Кэ.с = 1, гидравлического усилителя УП —

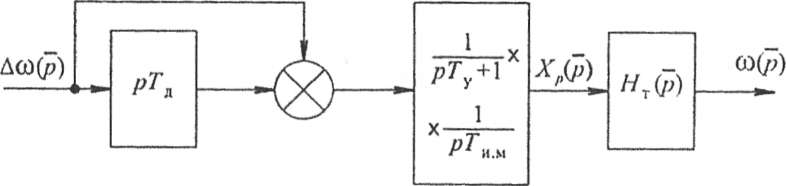
Рис.2.4. Структурные схемы АСРЧВ с И- (а), ПИ- (б) и ПИД- (в) регуляторами , синтезируемыми звеньями в цепи прямой связи апериодическим с постоянной времени Ту, а исполнительного механизма — интегрирующим звеном с постоянной времени, равной постоянной времени дифференциаторов
Ти..м = Тд передаточные функции АСРЧВ в разомкнутом состоянии записываются как пропорциональные:
Ни
Однако оказывается, что при интегрирующем исполнительном механизме АРЧВ с рассмотренной структурной схемой астатического И- регулятора неработоспособна. Как указывалось, в процессе пуска и при холостом ходе гидро- или турбоагрегата динамические свойства турбины, как и исполнительного элемента регулятора, описываются передаточной функцией интегрирующего звена. Поэтому структурная схема АСРЧВ получается с двумя последовательно соединенными интегрирующими звеньями, что означает структурную ее неустойчивость [1].
Теоретически такая АСРЧВ в замкнутом состоянии находится на грани устойчивости, поскольку характеристическое уравнение — равенство нулю знаменателя передаточной функции замкнутой АСРЧВ — имеет мнимые корни. Практически это означает, что она возбуждается — переходит в автоколебательное, т.е. неустойчивое состояние при любом сколь угодно малом воздействии (возмущении).
Автоматические
системы с ПИ-регуляторами и ПИД-регуляторами
реализуемы. Однако алгоритм автоматического
регулирования частоты вращения турбин
с интегрирующими механизмами,
воздействующими на их регулировочные
элементы, формируется исключительно
по второму способу, т.е. охватом
функциональной обратной связью
исполнительного и других последовательно
с ним соединенных элементов АРЧВ. При
этом динамические свойства исполнительного
элемента не влияют на алгоритм
автоматического регулирования: второй
способ формирования алгоритма и
синтеза структурной схемы АСРЧВ
универсален. Если функциональная
отрицательная обратная связь охватывает
практически весь регулятор (рис. 3.5,а),
то алгоритм автоматического регулирования
при обычно достаточно высоком коэффициенте
усиления сигналов регулятором определяется
передаточной функцией
Но.с
( )
структурного звена, реализующего
обратную связь.
)
структурного звена, реализующего
обратную связь.
Как известно [1], передаточная функция
Н3( )
замкнутого элемента или совокупности
последовательно соединенных элементов,
замкнутых отрицательной обратной
связью, определяется но передаточным
функциям разомкнутой их совокупности,
в данном случае регулятора, Нр
(
),
и обратной связи Но.с
(
)
как
)
замкнутого элемента или совокупности
последовательно соединенных элементов,
замкнутых отрицательной обратной
связью, определяется но передаточным
функциям разомкнутой их совокупности,
в данном случае регулятора, Нр
(
),
и обратной связи Но.с
(
)
как
Нр
Комплексный коэффициент передачи (при р =ϳω)
Нр
Если при любом значении р. т.е. при любой частоте воздействия на АСЧВ, абсолютные значения
Яр(р)Яол(р) > 1; К„(и)Ка.с(и) » 1, (3.7)
то передаточная функция и комплексный коэффициент передачи
Нр
Соотношения (2.7) практически, а для так называемых предельных АСР и теоретически [4, 6], всегда выполняются.
Если функциональная обратная связь жесткая (см. рис. 2.5,а)
Но.с(р)=Ко.с
то получается алгоритм пропорционального регулирования, а регулятор — статический пропорционального действия (П-регулятор). При апериодическом звене с постоянной времени Ти.п , представляющем измерительный преобразователь частоты ИПЧВ с коэффициентом преобразования ки.ч, передаточная функция П-регулятора согласно (3.8) и с учетом (3.9)
Н
При гибкой функциональной обратной связи, реализуемой реальным дифференцирующим звеном (см. рис. 3.5,а)
Нв
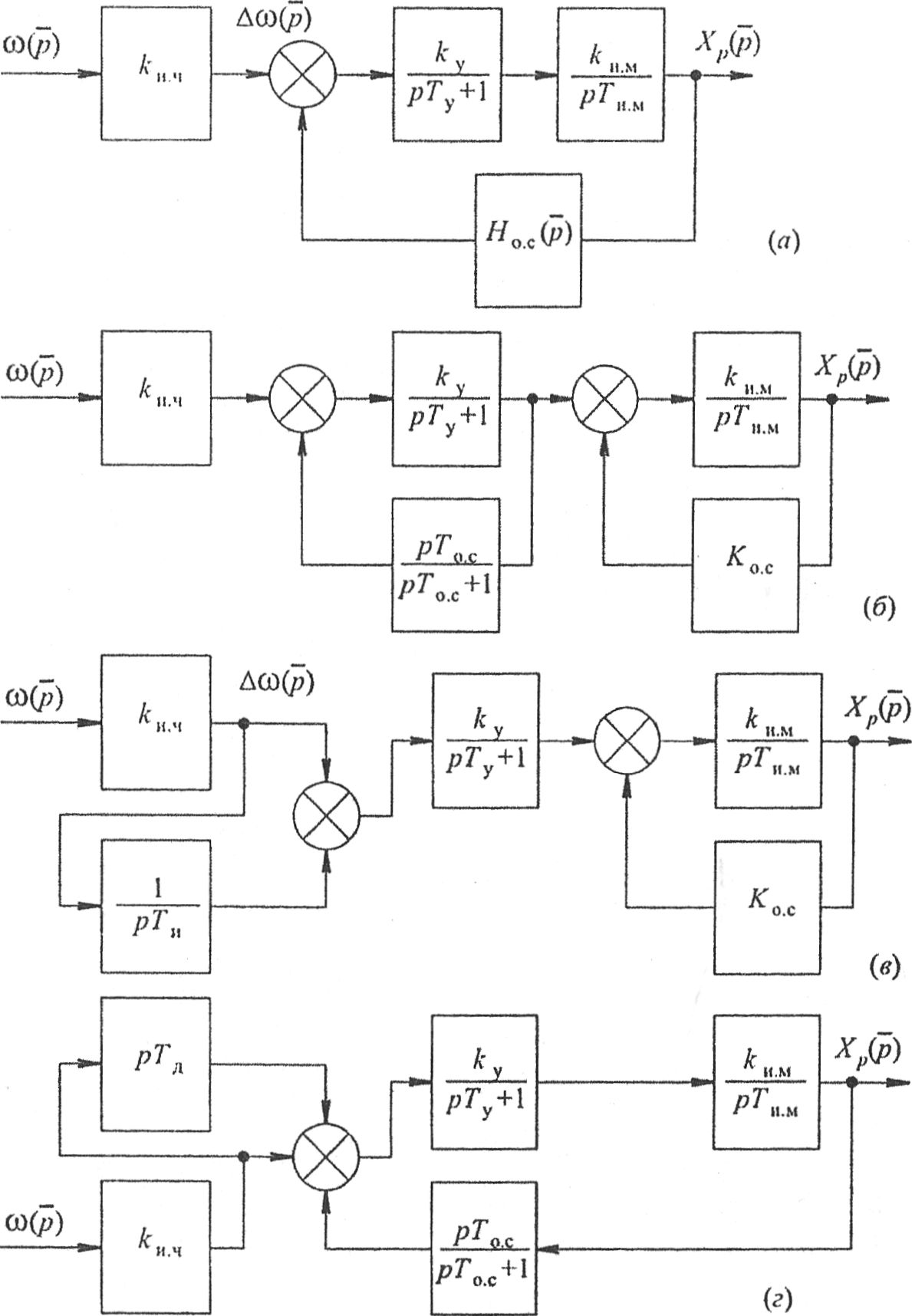
Рис. 3.5. Структурные схемы П- или ПИ- (а,б), ПИ- (б,в) и ПИД- (г) регуляторов, синтезируемые функциональной обратной связью.
Получается согласно (3.5) и (3.11) и с учетом (3.10) астатический (мни- мостатическнй) ПИ-регулятор с такой же передаточной функцией, как и (3.3):
//„и(Р) = = А„.ч (1 + ттЛгг • (3.12)
/'/»... + 1 Р'о.с \ Р'с.сУ р1п.п + 1
При переходном процессе регулятор функционирует аналогично статическому, но установившийся режим наступает после полного восстановления частоты вращения.
Здесь стоит отметить, что местная гибкая отрицательная обратная связь, выполняемая идеальным дифференциатором
Нг.оАр) = РТо.С , (3.13)
не является функциональной. Она используется лишь для изменения постоянных времени апериодических звеньев [1].
Второй вариант формирования алгоритма автоматического регулирования но рассматриваемому способу предполагает отдельное преобразование интегрирующего Н(р) = ки.м./рТи.м. исполнительного механизма в инерционный усилитель, замещаемый апериодическим структурным звеном, охватом его местной жесткой отрицательной обратной связью (рис. 3.5,б и в). В соответствии с (3.5) и (3.9)
1 1
Г/ /—\ рТ им ко.с *у.и ,
НчлАР) = = -7р = ГТ • (3-14)
. , л о.с Тпм рГу.,, + 1
1 + -^7— Р-гГ~ + 1 Р-* н.м ^о.с
Автоматический регулятор — статический с П-алгоритмом и передаточной функцией, определяемой произведением передаточных функций звеньев, замещающих измерительную часть, — относительно малоинерционный (с постоянной времени Ти.п.) ИПЧВ и обычно безынерционные элемент сравнения и усилитель-сумматор с общим коэффициентом преобразования ки.ч и исполнительную часть — апериодический усилитель с постоянной времени Ту.и и коэффициентом усиления ку.и.
С учетом (3.14) передаточная функция П-регулятора
Нц(р) = к11Л1куЛ1-г—— * ——т • (3.15
' (р!».п + 1)(рГул + 1)
Астатический ПИ-регулятор получается охватом рассмотренной функциональной обратной связью в виде реального дифференциатора с передаточной функцией (3.11) только элементов измерительного органа частоты ИОЧВ (кроме ИПЧВ) и усилителя-преобразователя регулятора (рис. 3.5,5)
Япи(Р)
= кп.чкуМ
(1 + (т
* г
,п
• (3.16)
V рТ„) (рГ„.„ + 1)(рТу.„+ 1)
Тот же результат достигается и без функциональной обратной связи вводом в измерительную часть П-регулятора (параллельным подключением) интегратора с постоянной времени Ти (рис. 3.5,е).
Пропорционально-интегрально-дифференциальный алгоритм формируется вводом в измерительную часть ПИ-регулятора (параллельным подключением) идеального дифференциатора с постоянной времени Тл (рис. 3.5,г). С учетом (3.12) передаточная функция ПИД-регулятора
Япид(р)
= *и.ч
(1
+
рТд
+
-^-Л
1
. (3.17)
Учитывая, что постоянные времени исполнительного механизма и турбины на порядок превышают постоянные времени элементов регулятора. для выяснения устойчивости функционирования АСРЧВ в замкнутом состоянии допустимо принять передаточные функции АСРЧВ в разомкнутом состоянии в виде произведений коэффициента передачи ИЧ и УП (см. рис. 3.2) регулятора Кр = 1 и передаточных функций звеньев, замещающих исполнительный механизм Ни.м(р) или Ни.у(р) и турбину Нт(р) = 1/рТт
Для замкнутой АСРЧВ согласно (3.5) при Ко.с = 1 (главная обратная связь) и, например (3.2) при Ту = 0, при первом способе формирования алгоритма регулирования
, (3.18)
1 + пя(р)Ко.с , , 1 1 р Т„.мТт + 1
рТим РТт
а при втором способе формирования, например согласно (3.15) при Ту =0
Яз2(Ю ~ РТТ(РТУ1Ц)+1 = р7Ту.„Тт + рТт + 1 • (ЗЛ9)
Как указывалось, корни характеристического уравнения в первом случае [см. (3.18)]
Л.мТт + 1 = 0, (3.20)
мнимые
Р1.2 = +3\ 7рКг , (3.21)
у -М1.М-*Т
т.е. АСРЧВ в замкнутом состоянии неустойчива.
При формировании алгоритма автоматического регулирования по второму способу в соответствии, например, с (3.19):
р2Ту.„Тт + рТт + 1 = 0, (3.22)
и корни уравнения (3.22)
Тт .у/т*-4ТулТг
Р1,2
= +] от
т (3.23)
содержат отрицательную вещественную составляющую, обеспечивающую затухание колебательного переходного процесса в замкнутой АСРЧВ.
Применяемые на практике ЛРЧВ турбин функционируют по алгоритмам автоматического регулирования, формируемым способом охвата их элементов функциональными отрицательными обратными связями.
Автоматические регуляторы частоты вращения паровых турбин являются статическими П-регуляторами, а гидравлических турбин — астатическими ПИ- или ГШД-регуляторами. Различие обусловливается несоизмеримостью постоянных времени инерции турбин. Необходимый для а периодичности [условие Т2т> 4Ту.иТт — см. (3.23)] изменения частоты вращения при пусках турбин и подготовке генераторов к синхронизации статизм характеристик регулирования частоты вращения паровых турбин укладывается в допустимые пределы Кст.п. ~ 0,05, а гидравлических достигает Кст.г. > (0,15-0,2), что недопустимо [1].