

нефтегазопромыслового оборудования методичка
.pdfvk.com/club152685050 | vk.com/id446425943
= ( шт + 2ж) ∙ (4.23)
Описанный способ уравновешивания называется балансирным. Он прост, но его основным недостатком является появление дополнительных инерционных сил, обусловленных наличием массы груза G. Инерционные силы отрицательно сказываются на работе всех деталей установки.
Этого недостатка нет у роторного способа уравновешивания (рис. 4.37). Уравновешивающий груз монтируют на кривошипе. При ходе штанг вверх и вниз работа двигателя будет равна:
|
в |
= ( |
+ ) ∙ − ∙ 2 · ; |
|
н |
= − |
+ ∙ 2 · |
||
|
шт |
ж |
|
|
|
шт |
|
||
Приравняв правые части уравнений, получим (полагая, что а = b): |
|||||||||
|
|
|
= |
|
∙ (2 ∙ |
+ ) |
|
||
|
|
|
|
|
|||||
|
|
|
|
4 ∙ |
шт |
|
|
ж |
|
|
|
|
|
|
|
|
|
|
|
Но S = 2 ·r, а с учетом различной длины плеч балансира получим приближенно вес роторного груза:
|
= |
∙ |
∙ ( |
+ |
ж |
) |
(4.24) |
|
|
||||||
|
|
∙ |
шт |
2 |
|
|
|
|
|
|
|
|
|||
Приняв стандартное значение роторного груза, перемещая его по кривошипу, определим место его установки по формуле:
′ = ( |
+ |
ж |
) ∙ |
∙ |
(4.25) |
|
2 |
∙ |
|||||
шт |
|
|
|
|||
|
|
|
|
|
|
При роторном уравновешивании инерционные усилия, возникающие при движении грузов воспринимаются только подшипниками кривошипного вала и при его постоянной угловой скорости вращения не передаются на другие детали установки.
При комбинированном уравновешивании на балансире устанавливают уравновешивающий груз G (рис. 4.38).
Вес груза на роторе определяется следующим образом:
При ходе штанг вверх и вниз работа, затрачиваемая двигателем, равна:
в = ( шт + ж) ∙ − ∙ − ∙ 2 · ;
н = − шт ∙ + ∙ + ∙ 2 · ,
где - перемещение точки подвеса штанг;- перемещение центра тяжести на балансире по вертикали. Определим величину
груза , задавшись значением веса груза G. Для этого, приравняв правые части уравнений, получим:
-183-
vk.com/club152685050 | vk.com/id446425943
= 2∙ ∙ ( шт + 2ж) − 2∙∙
Но = ∙ 2 ∙ , = ∙ 2 ∙ тогда получим приближенно:
|
= |
∙ |
∙ ( |
+ |
ж |
) − |
∙ |
∙ |
(4.26) |
|
|
|
|||||||
|
|
∙ |
шт |
2 |
|
∙ |
|
||
|
|
|
|
|
|||||
Приняв стандартное значение роторного груза, определим мест его установки по формуле:
′ = |
∙ |
∙ ( |
+ |
ж |
) − |
∙ |
∙ |
(4.27) |
|
∙′ |
2 |
∙ |
|||||||
|
шт |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Комбинированное уравновешивание применяют в основном на средних по мощности станках-качалках, где использование балансирного уравновешивания привело бы к появлению значительных сил инерции от противовеса.
Уравновешенность установки контролируют замером величины тока электродвигателя, максимальные значения которого при ходе штанг вверх и вниз должны быть одинаковыми.
Вопрос 4.28. Крутящий момент на кривошипе станка-качалки
Крутящий момент на кривошипном валу редуктора станка-качалки определяется по формуле:
кр = ∙ |
(4.28) |
где Т - тангенциальное усилие. Тангенциальноеусилие определяется по формуле:
= |
∙ sin + |
2 |
sin(2 ∙ ) |
(4.29) |
|
||||
1 |
2 |
|
|
|
где с1 - статический коэффициент; с2- динамический коэффициент, которые
определяются при ходе колонны штанг вверх и вниз при различных способах уравновешивания по таблице 1.10 [9].
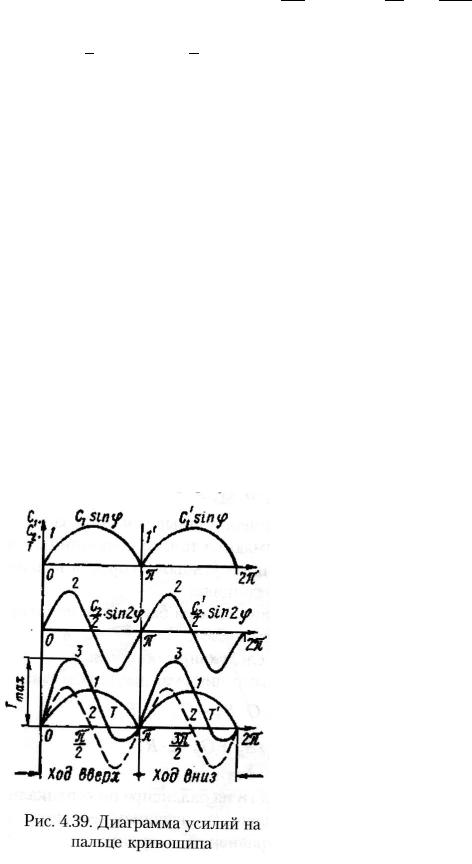
Определим графически максимальное значение тангенциальнойсилы. График, характеризующий
-184-

vk.com/club152685050 | vk.com/id446425943
изменение тангенциального усилия за время оборота кривошипа, приведен на рис. 4.39. Он является суммой двух синусоид с1 ∙ sin и характеризует изменение статических сил за оборот кривошипа и с2 ∙ sin 2 ∙ — изменение динамических сил.
Из графика видно, что максимальное значение усилия достигается два раза, при положении кривошипа, соответствующем углу 1= 45...600 и 2= 225...240".
Вопрос 4.29. Мощность электродвигателя станка-качалки
Для приведения в действие балансирного станка-качалки приводной двигатель должен обеспечить создание на кривошипном валу редуктора момента Мкp. Эффективная мощность станка-качалки:
эф = кр ∙
При постоянстве угловой скорости и) и радиуса кривошипа г мощность за время полного оборота кривошипа будет определятся по тому же закону, что и тангенциальное усилие.
Эффективная мощность станка-качалки определяется исходя из среднего квадратического значения крутящего момента:
1эф = ∙ ∙ √ ∙ ∫ 2 ∙
0
что с учетом формулы (4.26), можно записать как:
эф = ∙ ∙ √ |
1 |
∙ [ 12 |
|
sin2 ∙ + 1 |
|
|
sin ∙ sin(2 ∙ ) ∙ + |
2 |
∙ sin2(2 ∙ ) ∙ ] |
|
|
|
∙ ∫ |
∙ 2 |
∙ ∫ |
2 |
(4.30) |
||||||
|
4 |
||||||||||
|
|
0 |
|
|
0 |
|
|
|
Для определения точного значения мощности двигателя строят нагрузочные диаграммы, характеризующие изменение мгновенной мощности в течение двойного хода. На их основе методом эквивалентного тока или мощности определяют необходимую номинальную мощность двигателя по условиям нагрева. Выбранный двигатель должен быть проверен по условию пуска и условию преодоления пиковой нагрузки.
Двигатели с кратностью начального пускового момента по отношению к номинальному, равному не менее 1,8...2,0, могут использоваться для привода станковкачалок. При хорошем уравновешивании установок кратность максимального момента к номинальному, с учетом перегрузок и возможности понижения напряжения в сети, должна составлять 2,1...2,3.
Продифференцировав и подставив пределы, получим:
-185-

vk.com/club152685050 | vk.com/id446425943
|
= ∙ ∙ √ |
2 |
|
2 |
|
|
1 |
+ |
2 |
(4.31) |
|
|
|
||||
эф |
2 |
8 |
|
||
|
|
||||
Применение этой формулы, основанной на элементарной теории, возможно лишь для скважин с небольшой глубиной подвески насоса при работе с малым числом двойных качаний.
Для определения мощности установок с большой глубиной подвески и значительным числом ходов можно пользоваться формулой Д. В. Ефремова:
= 0,0409 ∙ ∙ 2 |
∙ ∙ ∙ ∙ g ∙ ∙ ( |
1−н∙ск |
+ |
0 |
) ∙ , (4.32) |
|
|||||
пл |
|
н∙ск |
|
||
|
|
|
|
||
где Dпл - диаметр плунжера;
S - длина хода полированного штока; n — число двойных качаний в минуту;- плотность откачиваемой жидкости; Н - высота подъема жидкости;н - КПД насоса;ск - КПД станка-качалки;
0 - коэффициент подачи;
k - коэффициент, учитывающий степень уравновешенности станка-качалки (k = 1,2 для уравновешенного и k = 3,4 для неуравновешенного станка-качалки).
Вопрос 4.30. КПД штанговой насосной установки
КПД установки определяется произведением КПД ее основных элементов и зависит от потерь энергии в них. Определение потерь в общем виде весьма сложно, так как они изменяются в зависимости от режима работы скважин, степени изношенности оборудования, кроме того на них существенно влияют другие факторы, усложняющие условия эксплуатации ШСНУ.
КПД подземной части установки характеризует потери энергии между поверхностью и глубинным насосом;
Таблица4
Ориентировочные значения КПД отдельных систем
Система |
Суммарный КПД, % |
|
|
Скважинный насос |
70.. .75 |
|
|
Колонна труб и штанг |
80. ..90 |
|
|
Балансирный станоккачалка: современной |
70. ..80 50 |
конструкции старой конструкции |
|
|
|
-186-
vk.com/club152685050 | vk.com/id446425943
КПД скважинного насоса обусловлен коэффициентами наполнения нап и гидравлическим Г, зависящими от утечек в клапанах и паре плунжер - цилиндр;
КПД колонны штанг и труб обусловлен механическими потерями при трении, потерями энергии при деформации штанг и труб, гидравлическим сопротивлением штанг и труб течению жидкости;
КПД наземной части установки обусловлен потерями в станке-качалке (потери в клиноременной передаче, редукторе, подшипниках, канатной подвеске), а также потерями на трение полированной штанги в устьевом сальнике.
Таким образом, общий КПД установки составляет 0,4...0,55, но может быть и ниже (при изношенности подземного оборудования).
Вопрос 4.31. Подбор оборудования для штанговой насосной установки
Первый этап - определение (выбор) насоса. Задаваясь его производительностью, определяют с учетом коэффициента наполнения, равного 0,8, его диаметр при различных сочетаниях длин ходов числа двойных качаний п. Последние определяют по паспорту станка-качалки, если он уже установлен на скважине, либо назначают с учетом параметров балансирных станков-качалок.
При этом необходимо стремиться к возможно большей длине хода плунжера насоса, так как это позволяет применять насос меньшего диаметра (меньше величины утечек, меньше силы трения) и уменьшает число циклов нагружения штанг (это также увеличивает их долговечность).
Второй этап - подбор колонны штанг. Определив диаметр насоса, длину хода плунжера и число качаний, определяют (подбирают) конструкцию колонны штанг, после чего подсчитывают деформацию колонны.
Третий этап -выбор колонны труб. Трубы, как правило, подбирают из конструктивных соображений, исходя из типа насоса - вставного или трубного. После чего их проверяют на прочность. Желательно применять равнопрочные трубы с высаженными концами, обеспечивающие максимальную глубину спуска насоса. Подобрав колонну труб, определяют ее деформацию при работе насоса.
Четвертый этап - выбор типа станка-качалки. По результатам первых грех этапов определяют необходимую длину хода точки подвеса штанг с учетом деформации штанг и труб, а также максимальную нагрузку на полированный шток. На основании этих данных подбирают станок-качалку, удовлетворяющий требуемым параметрам. Если такого станка нет среди применяемых моделей (например длина получается
-187-
vk.com/club152685050 | vk.com/id446425943
завышенной), повторяют первые два этапа, задаваясь маркой насоса, обеспечивающего необходимую производительность.
Выбранный станок-качалка должен обладать некоторым запасом максимальной величины нагрузки в точке подвеса штанг, в длине хода и числе качаний, чтобы впоследствии при эксплуатации скважин была возможность изменять их как в сторону уменьшения, так и увеличения.
После выбора модели станка-качалки рассчитывают уравновешивание и проверяют соответствие необходимого максимального крутящего момента паспортному его значению.
Тип наземной части установки определяется, исходя из условий ее работы. Балансирные станки-качалки с балансирным уравновешиванием используют на мелких скважинах с небольшим числом качаний. Наиболее универсальны установки с роторным и комбинированным уравновешиванием.
Пятый этап - выбор приводного электродвигателя. Для этого, зная тангенциальное усилие на пальце кривошипа, определяют мощность приводного двигателя, частота вращения вала которого назначается исходя из передаточного отношения редуктора и клиноременной передачи.
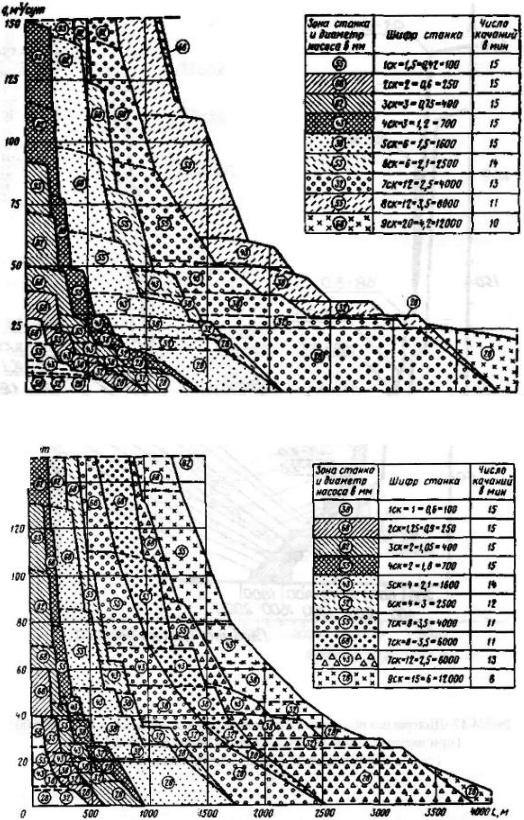
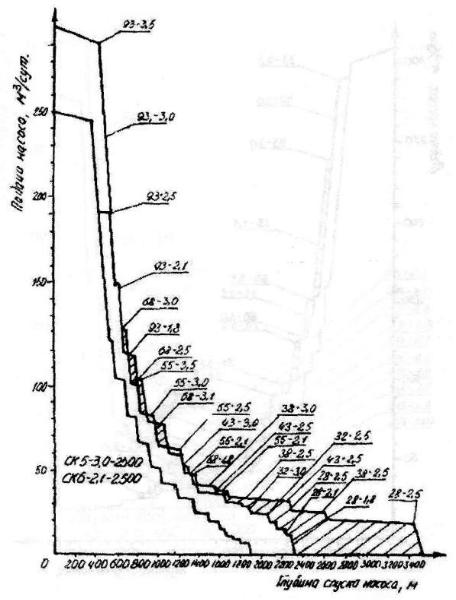
Выбор оборудования и режимов работы по изложенной выше методике - сложная и трудоемкая задача, для решения которой А.Н. Адониным была составлена диаграмма (рис. 4.40, 4.41). Для станков - качалок по ГОСТ 5866-66. Диаграмма дает возможность быстро подбирать оборудование по заданным значениям дебита и высоты подъема жидкости.
Диаграммы построены на основе следующих исходных данных:
-плотность откачиваемой жидкости принята равной 900 кг/м3;
-динамический уровень находится у приема насоса;
-коэффициент наполнения насоса равен 0,85.
Сплошные ломаные линии указывают границы зон применения станка-качалки одного типа, а пунктирные - границы областей в этих зонах.
Каждой зоне области соответствует насос (плунжер) определенного диаметра в мм (на диаграмме показан цифрой в кружке).
При подборе оборудования глубиннонасосной установки и режима его работы сначала определяют тип станка-качалки и диаметр плунжера глубинного насоса, которые находят пересечением проекций дебита и глубины спуска насоса на осях Q и
Н.
Тип насоса определяют в зависимости от глубины подвески. При глубинах больше 1000 м следует применять вставные насосы.
Конструкция колонны штанг и труб определяется с помощью данных таблицы 1.11
[12].
-188-
vk.com/club152685050 | vk.com/id446425943
Рис. 4.40. Диаграмма Адонина А.М. для базовых моделей станков-качалок
Рис. 4.41. Диаграмма Адонина А.М. для модифицированных моделей станков-качалок
-189-
vk.com/club152685050 | vk.com/id446425943
-190-
vk.com/club152685050 | vk.com/id446425943
Рис. 4.43. Диаграмма области применения станков - качалок СКЭ-3,5-5600 (чистая зона) и СК10-3-5600 (заштрихованная зона)
при числе качаний 12 в мин.
-191-
vk.com/club152685050 | vk.com/id446425943
Рис. 4.44. Диаграмма области применения станков - качалок СК8-3,5-4000 (чистая зона) и СК12-2.5-4000 (заштрихованная зона)
при числе качаний 12 в мин.
-192-