

Проектируя это векторное равенство на оси, получим:
х = O2O1 sin φ + O1A sin ψ = (2r + l) sin φ,
у = - O2О1 cos φ + O1A cos ψ = l cos φ.
Отсюда следует, что точка В в процессе движения перемещается вдоль оси О2х, так как уВ = уА – l соs φ=0.
Подставляя φ = kt, получим уравнения движения точки А:
х = (2r + l) sin kt, y = l cos kt,
которые одновременно являются и уравнениями траектории точки в параметрической форме. Исключая время t, получим уравнение кривой, по которой движется точка, в непараметрической форме.
Для исключения t перепишем уравнения движения в виде
х/(2r + l) = sin kt; y/l = cos kt.
Пользуясь тождеством sin2 kt+cos2 kt =1, получим
![]() .
(а)
.
(а)
Это эллипс с полуосями а =2r + l, b = l и центром в начале координат. При изменении t от 0 до ∞ абсцисса х изменяется в пределах –a ≤ x ≤ a, а ордината у - в пределах –b ≤ y≤ b, и, следовательно, точка в своем движении обходит весь эллипс. Таким образом, в данной задаче вся кривая, определяемая уравнением (а), является траекторией точки.
Задачи
1.1.1.* По заданным в векторной форме уравнениям движения точки определить ее траекторию:
1)![]() = (2t+1)
= (2t+1)![]() +(2-3t)
+(2-3t)![]() ;
;
2)
= (2+3t)
+(1-2t)
+(2+t)![]() ;
;
3) = t2 +(5-2t2) ;
4)
=
3
cos![]() +
+
![]() ;
;
5)
=
(2+sin![]() )
+(l+2cos
)
;
)
+(l+2cos
)
;
6) = 6cos2t +t ;
7) = (3 + 2 cos 2t) + (2 -3 sin 2t) ;
8) =3 sin t3+2 cos t3 ;
9) = t +(2t - t2) ;
10) = cos 2t +sin t .
Ответы:
1)
Зх +
2у =
7; z
= 0 (l
≤ x
≤![]() );
);
2)![]() (2≤ х ≤
);
(2≤ х ≤
);
3) 2 х + z = 5; y = 0 (0≤ x ≤ );
4) х2 + (y - l)2 = 9; z = 0;
5) (х - 2)2 + (z -1)2/4 = 1; y = 0;
6) y = 6 cos 2z; x = 0 (0 ≤ z ≤ );
7)![]() ;
z
= 0;
;
z
= 0;
8) y2/9 + z2/4 = 1; x = 0;
9) y = 2x - x2; z = 0 (0 ≤ x < );
10) x = l - 2z2; y = 0 (-l ≤ x ≤ l).
1.1.2.* По заданным уравнениям движения точки найти ее траекторию в плоскости хОу и начальное положение:
1) x = 2sin ; y = 3cos ;
2) x =3cos t; y =3 -5sin t;
3)
x
=![]() ;
y
= e-t;
;
y
= e-t;
4) x = t3 + 2; y = 3 - t3;
5) x = 2 cos 2t; y =3 sin t;
6) x = 4 sin 2t; y =2 cos t;
7)
x
=
2 tg![]() ;
y
=
3 sin t
(t<
π);
;
y
=
3 sin t
(t<
π);
8) x = 3 tg ; у = соs t (t < π);
9) x = 3t; y = 6t - 5t2;
10)
x
= a(sin
kt
+
cos kt);
y
= b(sin
kt
– cos
kt);![]()
11) x = 2sin t2; y = 3cos t2;
12) x = a + r cos ωt; y= r sin ωt.
Ответы:
1) x2/4 + y2/9 = 1. При t = 0: x0 = 0; y0 = 3;
2)![]() .
При t
= 0: x0
= 3; y0
= 3;
.
При t
= 0: x0
= 3; y0
= 3;
3) у = е-х (0≤ x < ). При t = 0: x0 = 0; y0 = 1;
4) x + y = 5 (2≤ x < ). При t = 0: x0 = 2; y0 = 3;
5)
y2
=![]() (- 2≤ x
≤2). При t
= 0: x0
= 2; y0
= 1;
(- 2≤ x
≤2). При t
= 0: x0
= 2; y0
= 1;
6) x2 = 4y2(4 - y2) (- 4 ≤ x≤ 4 ). При t = 0: x0 = 0; y0 = 2;
7)
y
=
![]() (0 ≤ x<
).
При t
= 0: x0
= 0; y0
= 0;
(0 ≤ x<
).
При t
= 0: x0
= 0; y0
= 0;
8)
y
=![]() (0 ≤ x<
).
При t
= 0: x0
= 0; y0
= 1;
(0 ≤ x<
).
При t
= 0: x0
= 0; y0
= 1;
9)
y
= 2x-![]() x2
(0 ≤ x<
).
При t
= 0: x0
= 0; y0
= 0;
x2
(0 ≤ x<
).
При t
= 0: x0
= 0; y0
= 0;
10)
![]() .
При t
= 0: x0
= a;
y0
= - b;
.
При t
= 0: x0
= a;
y0
= - b;
11)
![]() .
При t
= 0: x0
= 0; y0
= 3;
.
При t
= 0: x0
= 0; y0
= 3;
12) (х - а)2 + y2 = r2. При t = 0: x0 = a + r; y0 = 0.
1.1.3.* Точка движется по окружности радиусa r против хода часовой стрелки так, что проходимая ею дуга изменяется по закону s = kt. Найти уравнения движения точки по отношению к системе хОу с началом в центре окружности, если горизонтальная ось Ох проходит через начальное положение точки.
Ответ:
x
= r
cos![]() ;
у = r
sin
.
;
у = r
sin
.
1.1.4.* Кулиса ОМ длиной l приводится в движение кривошипом ОА (рис. 3), вращающимся по закону φ = kt2. Составить уравнения движения конца кулисы М, если O1O = O1A.
Ответ:
x=
l
sin![]() ;
у
= l
cos
;
у
= l
cos![]() .
.
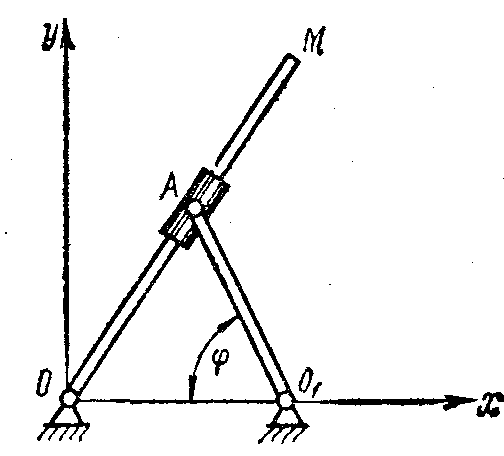
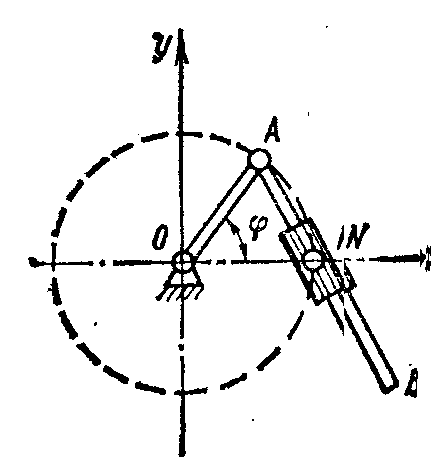
Рис.3 Рис. 4
1.1.5.* Стержень АВ длиной l движется так (рис. 4), что одна из его точек описывает окружность радиусом r = l/2, а сам стержень проходит через неподвижную точку N, лежащую на той же окружности. Составить уравнения движения точки В, если φ = ωt.
Ответ:
х = r
cos
ωt
+ l
sin![]() ;
у = r
sin
ωt
– l
cos
.
;
у = r
sin
ωt
– l
cos
.
1.1.6.* В V-образном двигателе угол между осями цилиндр α =90° (рис. 5). Коленчатый вал вращается по закону φ = ωt. Составить уравнения движения пальцев В и С, если длина кривошипа. ОА = R, а длины шатунов АВ и АС равны L.
Ответ:
![]() ;
;
![]() .
.
1.1.7.* В V-образном двигателе (рис.5) угол а между осями цилиндров равен 60°. Коленчатый вал вращается по закону φ = ωt. Составить уравнения движения пальцев В и С по направляющим, если длина кривошипа ОА равна R. А длины шатунов АВ и АС равны 2R. Определить положение пальца поршня В в тот момент, когда поршень С находится в крайнем верхнем положении.
Ответ:
![]() ;
;
 ;
;
![]() .
.
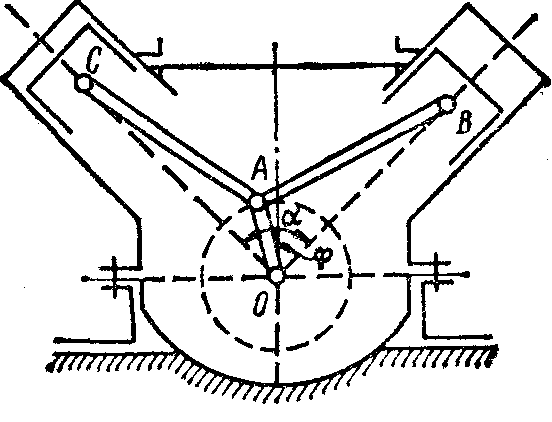
Рис.5 Рис. 6
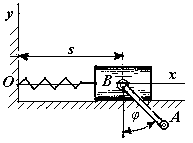
1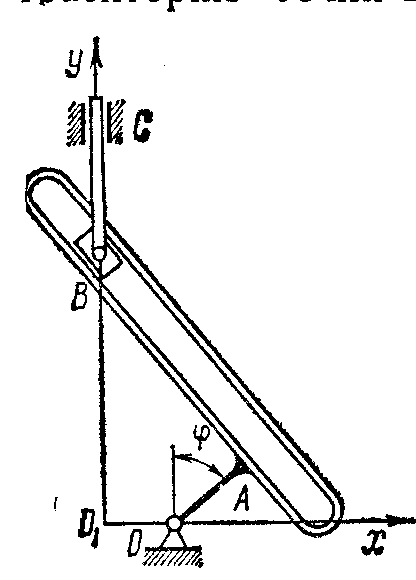 .1.8.*
Стержень АВ
длиной l
поворачивается
около точки
В (рис.6)
так, что угол
φ изменяется
по закону φ
= ωt, а ползун
В совершает гармонические колебания
согласно уравнению s
= a
+ b
sin
ωt.
Определить
траекторию точки
А.
.1.8.*
Стержень АВ
длиной l
поворачивается
около точки
В (рис.6)
так, что угол
φ изменяется
по закону φ
= ωt, а ползун
В совершает гармонические колебания
согласно уравнению s
= a
+ b
sin
ωt.
Определить
траекторию точки
А.
Ответ: (х - а)2/(b + l)2+(у2/ l2) =1 (эллипс).
1.1.9.* В механизме (рис. 7) найти уравнение движения точки В, если кулиса ОАВ вращается так, что угол φ = ωt, а расстояние от точки О до направляющей стержня ОО1 = b,
длина ОА равна а. Угол OAВ – прямой.
Рис.7
Ответ:
у =![]() +
b
tg
ωt.
+
b
tg
ωt.