

1.4. Плоскопараллельное движение твердого тела
1.4.1. Уравнения движения и скорости точек плоской фигуры
Уравнения движения плоской фигуры в неподвижной системе координат:
x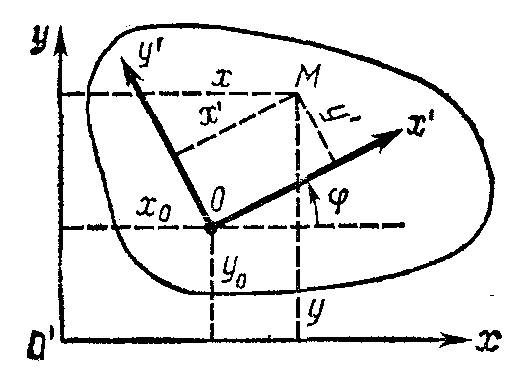 0
= x0(t);
y0
= y0;
φ
= φ(t),
(39)
0
= x0(t);
y0
= y0;
φ
= φ(t),
(39)
где x0 и y0 - координаты произвольной точки О, принятой за полюс; φ - угол между неподвижной осью О1х и осью Ох', неизменно связанной с фигурой (рис. 63). Уравнения движения любой
Рис. 63 точки плоской фигуры имеют вид
x = x0 + x'cosφ — y'sinφ; (40)
y = y0 + x'sinφ + y'cosφ,
г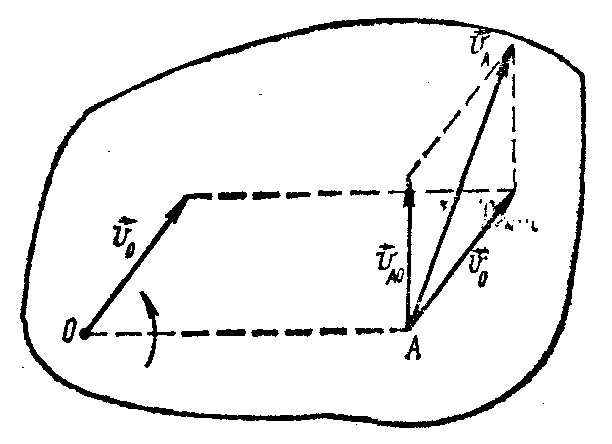 де
х', у'—координаты
этой точки в системе, скрепленной с
фигурой.
де
х', у'—координаты
этой точки в системе, скрепленной с
фигурой.
Скорости двух любых точек плоской фигуры О и А связаны между собой зависи-мостью (рис. 64)
![]() ,
(41)
,
(41)
где
![]() (42)
(42)
Рис. 64 - вращательная скорость точки А относительно О, направленная перпендикулярно отрезку ОА в сторону вращения фигуры и равная по модулю
vOA = ωOA. (43)
В
этих формулах
![]() есть мгновенная угловая скорость плоской
фигуры.
есть мгновенная угловая скорость плоской
фигуры.
Если за полюс О принять мгновенный центр скоростей Р, т. е. точку, скорость которой в данный момент равна нулю, то скорость любой точки А перпендикулярна отрезку РА, направлена в сторону вращения фигуры и равна по модулю
vA = ω·PA. (44)
Таким образом,
![]() .
(45)
.
(45)
Для нахождения мгновенного центра скоростей достаточно знать направления скоростей двух каких-либо точек плоской фигуры: мгновенный центр скоростей находится на пересечении перпендикуляров, восставленных из данных точек к направлениям их скоростей. Если эти перпендикуляры сливаются в один, то для нахождения мгновенного центра скоростей надо дополнительно знать модули скоростей.
Мгновенный центр находится в этом случае в точке пересечения общего перпендикуляра и прямой, соединяющей концы скоростей. Если же перпендикуляры параллельны, то мгновенного центра не существует. В этом случае ω = 0, а скорости всех точек плоской фигуры одинаковы по модулю и по направлению.
Если плоская фигура, ограниченная некоторым контуром, катится без скольжения по другому неподвижному контуру, то точка их соприкосновения в данный момент является мгновенным центром скоростей этой фигуры.
Теорема: проекции скоростей двух точек плоской фигуры на прямую, соединяющую эти точки, равны между собой, т. е.
прАВ
![]() = прАВ
= прАВ
![]() (46)
(46)
Проекции вектора и на оси, связанные с фигурой, определяют по формулам
![]() .
(47)
.
(47)
Пример 1. Кривошип ОА механизма (рис. 65) вращается с угловой скоростью ω0. Определить скорости точек В и С, угловую скорость звена BD в том положении механизма, когда α = 30°, β = 60°, а шатун ВС занимает вертикальное положение. Принять ОА= АВ =а; BD = a√3.
Решение. Механизм совершает плоскопараллельное движение. Ведущим звеном, движение которого задано, является кривошип ОА, совершающий вращение вокруг оси О. Определим модуль скорости конца кривошипа, то есть точки А:
νА = ω0 ОА = ω0 а
Вектор
![]() перпендикулярен ОА
и направлен в сторону вращения кривошипа.
Перейдем к звену АВ.
Найдем скорость точки В.
перпендикулярен ОА
и направлен в сторону вращения кривошипа.
Перейдем к звену АВ.
Найдем скорость точки В.
Вектор![]() направлен
перпендикулярно BD,
так как точка В
принадлежит одновременно и звену BD,
которое может вращаться вокруг точки
D.
направлен
перпендикулярно BD,
так как точка В
принадлежит одновременно и звену BD,
которое может вращаться вокруг точки
D.
Мгновенный
центр скоростей звена АВ
находится в точке Р
пересечения перпендикуляров к
и
.
Из ΔАВР
находим ВР
=
![]() ,
АР = а/2.
,
АР = а/2.
П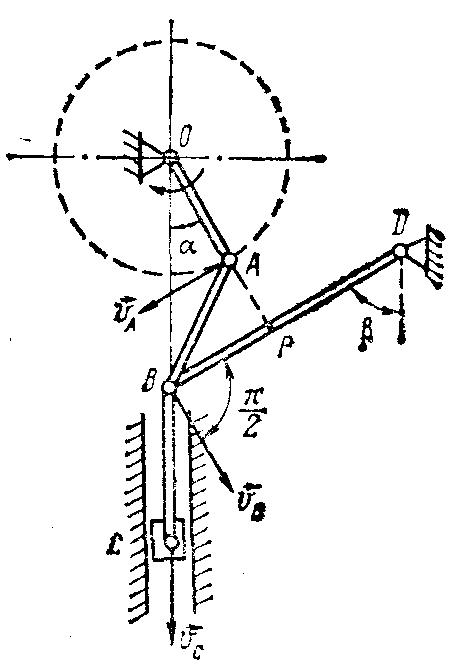 о
формуле (44),
vA
= ωAВ
·AP,
откуда
о
формуле (44),
vA
= ωAВ
·AP,
откуда
ωАВ = vА/АР = 2ω0.
Пользуясь этой же формулой, определим
vВ = ωAВ ·ВP = ω0 а√3.
Перейдем к звену ВD. Зная скорость точки В, найдем ωВD = vB /BD = ω0.
Далее рассмотрим движение звена ВС Используя теорему о проекциях скоростей двух точек, получим
прВС
= прВС
![]() =
vC
.
=
vC
.
Отсюда
vC = vB cos 30˚ = 3aω0/2.
Направления скоростей и
Рис. 65 показаны на рисунке 65.
Задачи
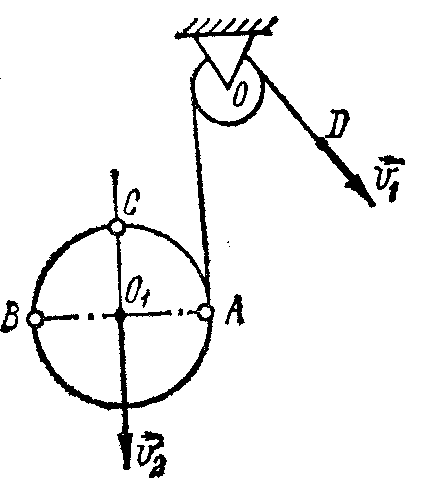
1.4.1.*
Цилиндр радиусом R
обмотан тросом, перекинутым через блок
О (рис.
66). Конец троса тянут со скоростью,
![]() в
то время как центр цилиндра имеет
скорость
в
то время как центр цилиндра имеет
скорость![]() .
Определить угловую скорость
.
Определить угловую скорость
Рис. 66 цилиндра, считая участок троса от
цилиндра до блока вертикальным. Найти модули скоростей точки В на горизонтальном диаметре
цилиндра и точки С на вертикальном диаметре.
Ответ:
![]() .
.
1.4.2.*
Подъем трубы производится с помощью
тале-вого ступенчатого барабана А
(рис. 67), вал
которого д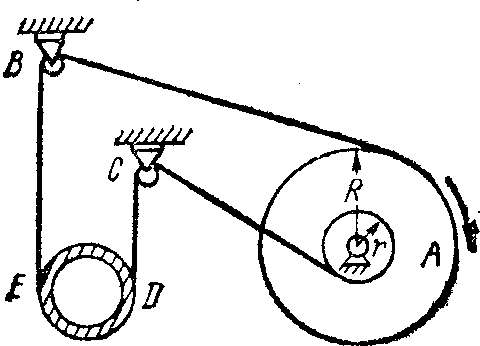 елает
10 об/мин. Определить модуль скорости
оси трубы, если
r = 5 см, R
= 15 см. Участки
тросов ВЕ
и DC считать
вертикальны-
елает
10 об/мин. Определить модуль скорости
оси трубы, если
r = 5 см, R
= 15 см. Участки
тросов ВЕ
и DC считать
вертикальны-
Рис. 67 ми. Ответ: v = 5,24 см/с.
1.4.3.*В механизме (рис. 68) («римская передача») ведущее зубчатое колесо I вращается с угловой скоростью ω0. Определить модуль скорости штока CD в момент, когда α = 90°, если при этом шарниры А1 и А2 лежат на прямой, проходящей через центры O1 и О2 и параллельной звену В1В2. Радиусы колес соответственно равны r1 и r2; О1А1 = а1; О2А2 = а2; СВ1=СВ2.
О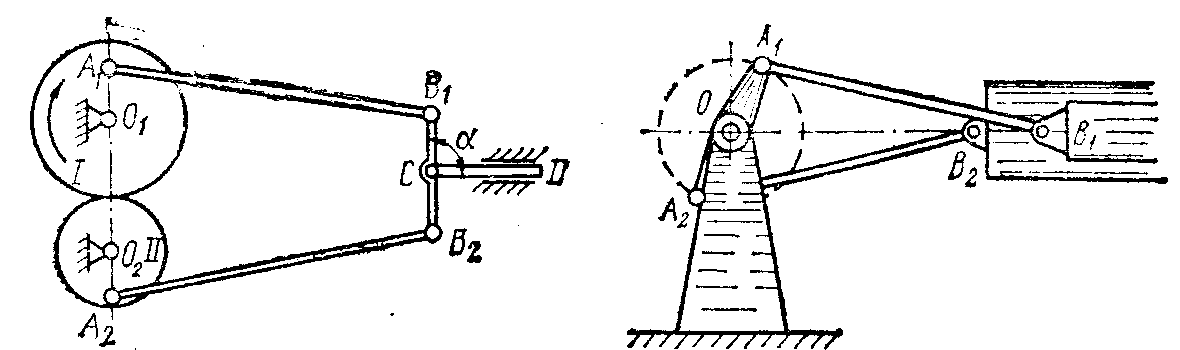 твет:
v = ω0
(a1r2
+
a2r1)/2r2.
твет:
v = ω0
(a1r2
+
a2r1)/2r2.
Рис. 68 Рис. 69
1.4.4.* Доказать, что отношение скоростей поршней B1 и B2 в механизме компрессора (рис. 69) в любой момент времени такое же, как и отношение расстояний от них до центра вращения кривошипа, если OA1= OA2, а А1В1 = А2В2
1.4.5.* На рис. 70 изображен механизм газового двигателя. Определить угловые скорости зубчатых колес в момент, когда звено В1В2 параллельно линии центров, шток ЕС - горизонтален, а точки крепления тяг А1 и А2 занимают наинизшее положение, если в этот момент скорость поршня равна v. Дано: О1А1= а1; О2; О2А2 = а2; CB1= b1; СВ2= b2; радиусы r1 и r2 (a1b2r2 ≠ a2b1r1)
О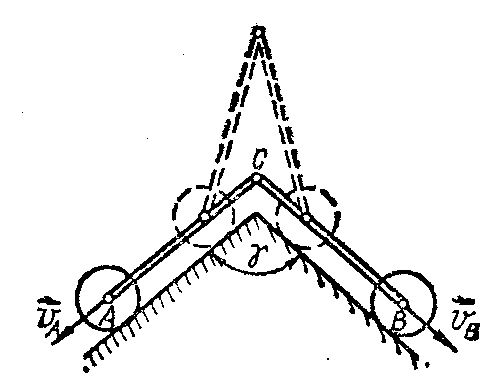
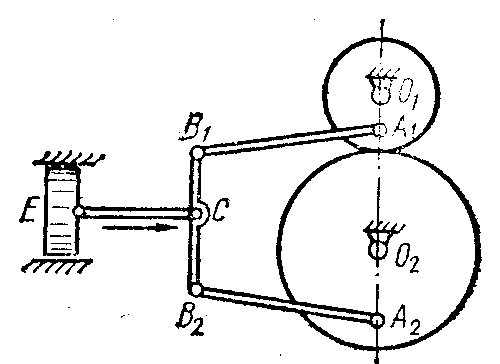 твет:
твет:![]() (если знаменатель
положителен, то колесо I
вращается против движения часовой
стрелки).
(если знаменатель
положителен, то колесо I
вращается против движения часовой
стрелки).
Рис. 70 Рис. 71
1.4.6.* (рис. 71). Два катка положены на наклонные плоскости, образующие между собой угол γ, так, что они могут катиться по этим плоскостям без скольжения. Центры катков А и В шарнирно соединены со стержнями АС и ВС, имеющими общий шарнир С. Определить модуль скорости точки С в момент, когда стержни параллельны соответствующим плоскостям, если при этом центры катков имеют скорости и соответственно.
Ответ:
![]()
1.4.7. Зависят ли при плоскопараллельном движении значение и направление угла поворота твердого тела от выбора полюса? (Нет)
1.4.8. Зависит ли при плоскопараллельном движении твердого тела вид уравнений движения полюса от его выбора? (Да)
1.4.9. Стержень АВ (рис.72) движется согласно уравнениям хА = 2 + t2, yA = 0, φ = 0,25 π t. Определить абсциссу точки В в момент времени t1 =1 с, длина АВ=3 м. (0,879)
1.4.10. Центр колеса, катящегося по прямолинейному участку пути (рис.73), движется согласно уравнениям
хС = 0,3 t2, уC = 0,15 м. Определить в момент времени
t1 = l c ординату точки В, если в начале движения прямая АВ совпадала с осью Оу. (0,212)
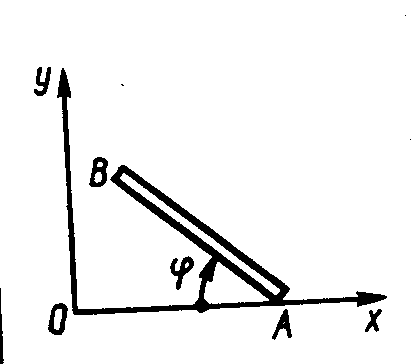
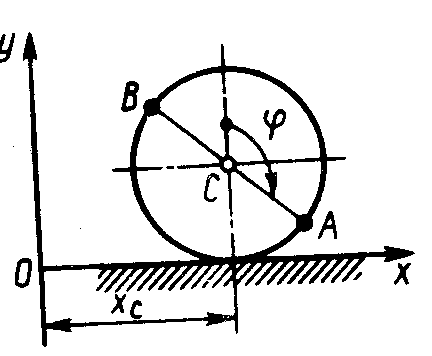
Рис. 72 Рис. 73
1.4.11. Балка AD (рис.74) движется согласно уравнениям хА = t2, yA = 0, φ = arc sin {2/ [4 + (3,5 - t2)2]0,5}. Определить абсциссу точки А в положении балки, когда ее угол поворота φ = 38°. (0,940)
1.4.12. Вершины А и В треугольника (рис. 75) во время движения все время находятся соответственно на осях Оу и Ох. Определить угол поворота φ в момент вре-мени t1 = 2 с, если вершина В из положения xB (0) = 2 м начала перемещаться с постоянной скоростью v B = 0,5 м/с; длина АВ = 4 м. (0,846)
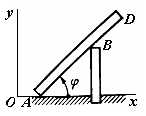
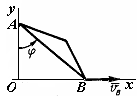
Рис. 74 Рис. 75
1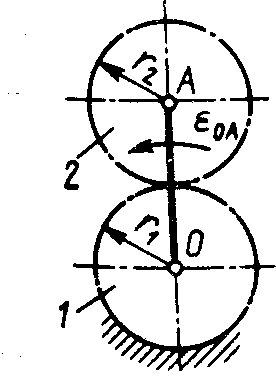 .4.13.
Колесо
радиуса R =
10 см катится
по прямолинейному
участку пути с постоянным ускорением
центра колеса аC
= 2π
cм/с2.
Определить, сколько оборотов совершило
колесо в момент времени t
= 10 с, если
скорость vC
(0) = 0.
(500)
.4.13.
Колесо
радиуса R =
10 см катится
по прямолинейному
участку пути с постоянным ускорением
центра колеса аC
= 2π
cм/с2.
Определить, сколько оборотов совершило
колесо в момент времени t
= 10 с, если
скорость vC
(0) = 0.
(500)
1.4.14. Кривошип ОА (рис. 76) начал равномерно вращаться из состояния покоя с угловым ускорением εOA = 0,1π. Определить, сколько оборотов совершит шестерня 2 по истечении 10 с. Радиусы
шестерен r1 = r2 = 10 см. (5)
Рис. 76