

§ 2. Математические модели регуляторов
Основными показателями качества общепромышленных автоматических регуляторов следует считать показатели динамической точности и надежности реализации заданного закона регулирования. Очевидно, что сконструировать регулятор, абсолютно точно реализующий заданный закон, практически невозможно. Поэтому регуляторы, которые точно воспроизводят приводимые ниже уравнения, называют идеальными. Реальные конструкции регуляторов описываются уравнениями, которые в меньшей или большей степени отличаются от идеальных, что приводит к некоторому изменению качества регулирования по сравнению с расчетным.
Пропорциональными (П) называют регуляторы, у которых выходная величина пропорциональна отклонению текущего значения Хт регулируемого параметра от заданного Хз.
![]()
Коэффициент пропорциональности К. в этом выражении называется коэффициентом усиления регулятора и является его настроечным параметром.
Введя обозначение Хвх=Хт—Хз, получим
![]()
В динамическом отношении П-регулятор представляет собой усилительное звено. Передаточная функция регулятора имеет вид
![]()
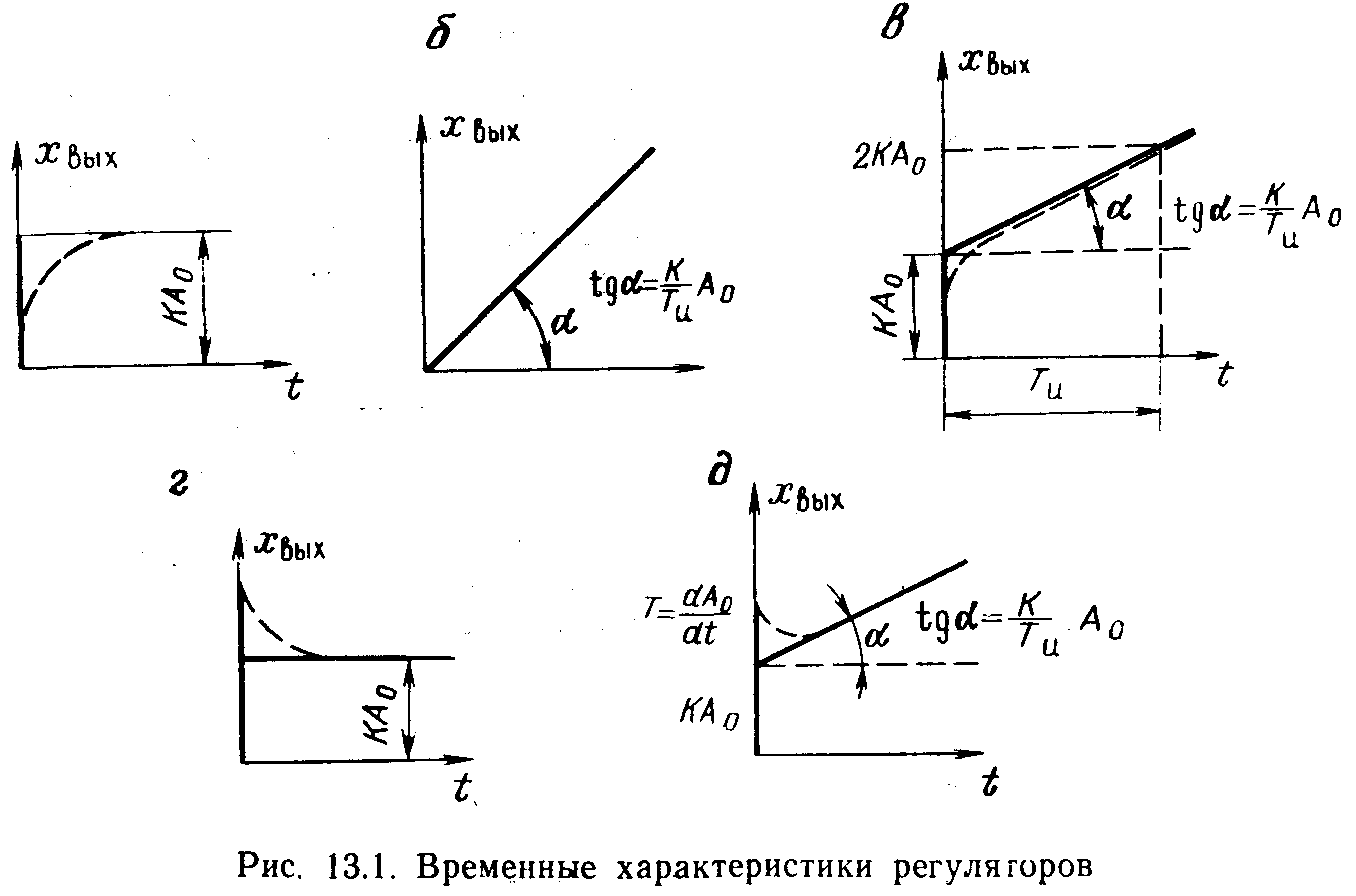
Временная характеристика П-регулятора при скачкообразном отклонении текущего значения регулируемого параметра от заданного Xвx=Ао показана на рис. 13.1,а.
Из выражения (13.2) следует, что каждому значению отклонения Хвх=Хт—Хз соответствует определенное значение выходной величины регулятора, т. е. в системе с П-регулятором возможны состояния равновесия при различных текущих значениях регулируемого параметра. П-регулятор не устраняет отклонение, он лишь приводит систему к новому состоянию равновесия, соответствующему новому значению регулируемого параметра. Преимущество такого регулятора заключается в быстром восстановлении равновесия в системе. Тот факт, что это равновесие наступает при новом значении регулируемого параметра, является недостатком П-регулятора. Остаточное отклонение регулируемого параметра xт—хз называется статической ошибкой П-регулятора.
Согласно уравнению (13.2), при равенстве текущего и заданного значений регулируемого параметра (Хвх=Хт—Хз=0) в состоянии равновесия выходная величина регулятора Хвых==0, т. е. регулирующий орган занимает одно из своих крайних положений. Для того чтобы при Хт=Хз регулирующий орган мог занимать промежуточное положение в пределах своего хода, в реальных конструкциях регуляторов предусматривается введение дополнительной составляющей на выходе регулятора Хвых.нач, причем так, чтобы при Хт==Хз соблюдалось условие Хвых=Хвых.нач.
Тогда уравнение П-регулятора имеет вид
![]()
Кроме того, в реальных регуляторах в результате некоторой инерционности характеристика несколько отличается от идеальной (см. пунктир на рис. 13.1,а).
П-регуляторы часто называются статическими. Интегральными (И) называют регуляторы, у которых выходная величина пропорциональна интегралу от отклонения регулируемого параметра:

Здесь К—коэффициент усиления; Т—постоянная времени регулятора, К и Т—параметры настройки регулятора.
В динамическом отношении И-регулятор представляет собой интегрирующее звено. Передаточная функция его имеет вид
![]()
Временная характеристика И-регулятора при скачкообразном отклонении регулируемого параметра Хвх=Ао показана на рис. 13,1,6. Выражение (13.5) в дифференциальной форме имеет вид
![]()
Отсюда видно, что отклонению регулируемого параметра пропорционально не значение выходной величины, а ее скорость. Поэтому одно и то же значение регулируемого параметра может быть достигнуто при различных значениях выходной величины регулятора. Вследствие отсутствия пропорциональной зависимости между входной и выходной величинами регулятора И-регуляторы часто называют астатическими.
При отклонении текущего значения регулируемого параметра от заданного выходная величина И-регулятора будет изменяться до тех пор, пока это отклонение не будет равно нулю, так как регулирование осуществляется без статической ошибки. Это существенное преимущество.
Недостатки И-регуляторов обусловлены их динамическими свойствами. Они могут работать только на объектах с большим самовыравниванием и малым запаздыванием. По этой причине такие регуляторы как самостоятельные устройства практически не применяются и конструктивно объединяются с П-регуляторами.
Пропорционально-интегральными (ПИ) называют регуляторы, у которых выходная величина пропорциональна отклонению регулируемого параметра и интегралу от этого отклонения:

Б таком регуляторе коэффициент усиления К и постоянная времени Ти являются параметрами его настройки.
В динамическом отношении ПИ-регуляторы эквивалентны усилительному и интегральному звеньям, соединенным параллельно.
Передаточная функция ПИ-регулятора
![]()
Временная характеристика ПИ-регулятора при скачкообразном отклонении регулируемого параметра Xвх=Ao показана на рис. 13.1,в. В таких регуляторах сочетаются лучшие свойства П- и И-регуляторов. При скачкообразном отклонении текущего значения регулируемого параметра от заданного ПИ-регулятор сначала под действием пропорциональной составляющей практически мгновенно приводит систему к новому состоянию равновесия, соответствующему этому отклонению, а затем под действием интегральной составляющей ликвидирует это отклонение.
Постоянная времени Ти определяет изменение выходной величины под действием интегральной составляющей и численно равна времени удвоения, т. е. времени, в течение которого изменение выходной величины, определяемое пропорциональной составляющей КАо, удваивается под действием интегральной составляющей (см. рис. 13.1,в).
В реальных конструкциях ПИ-регуляторов используется сочетание жесткой отрицательной и гибкой положительной обратных связей, которое называется изодромной обратной связью. Поэтому ПИ-ре-гуляторы часто называют изодромными, а их настроечный параметр Ти — временем изодрома.
При увеличении параметра настройки Ти регулятор по закону регулирования будет приближаться к П-регулятору. Если при настройке регулятора установить очень малые значения К и Ти, но так, чтобы их отношение К/Ти имело существенное значение, то получим И-регулятор. Характеристика реальных ПИ-регуляторов показана на рис. 13.1,в пунктиром.
Пропорционально-дифференциальными (ПД) называют регуляторы, у которых выходная величина пропорциональна отклонению регулируемого параметра и скорости этого отклонения:
![]()
Коэффициент усиления К и постоянная времени Тд в этом выражении являются параметрами настройки регулятора.
В динамическом отношении ПД-регуляторы эквивалентны усилительному и идеальному дифференцирующему звеньям, соединенным параллельно.
Передаточная функция ПД-регулятора
![]()
Временная характеристика ПД-регулятора при скачкообразном отклонении регулируемого параметра Хвх==Ао показана на рис. 13.1,г.
Выходная величина такого регулятора под действием дифференциальной составляющей мгновенно возрастает до бесконечно большой величины и также мгновенно падает до значения, определяемого пропорциональной составляющей. Естественно, что в реальных регуляторах невозможны мгновенные процессы и характеристика имеет вид, показанный на рис. 13(1,г пунктиром.
Сочетание в ПД-регуляторе пропорционального воздействия и воздействия по производной делает его менее инерционным по сравнению с П-регулятором. Объясняется это тем, что в момент возникновения отклонения скорость этого отклонения проявляется более значительно, чем само отклонение.
Использование в ПД-регуляторе воздействия по производной (скорости) отклонения означает введение в закон регулирования предваряющего воздействия, поэтому ПД-регуляторы называют пропорциональными регуляторами с предварением, а величину Тд— временем предварения.
Опережение выходного сигнала в ПД-регуляторе по сравнению с П-регулятором имеет существенное положительное значение при регулировании параметров в объектах, обладающих большим запаздыванием.
Недостаток ПД-регулятора—наличие, как и у П-регулятора, остаточной ошибки регулирования.
Пропорционально-интегрально-дифференциальными (ПИД) называют регуляторы, у которых выходная величина пропорциональна отклонению регулируемого параметра, интегралу от этого отклонения и скорости этого отклонения:
![]()
Параметрами настройки регулятора являются коэффициент усиления К, время изодрома Ти и время предварения Тд.
В динамическом отношении ПИД-регуляторы эквивалентны усилительному, интегрирующему и идеальному дифференцирующему звеньям, соединенным параллельно.
Передаточная функция ПИД-регулятора
![]()
Временная характеристика ПИД-регулятора при скачкообразном отклонении регулируемого параметра Хвх=Ао показана на рис. 13.1Д Пунктиром показана характеристика реальных ПИД-ре-гуляторов.
С помощью ПИД-регулятора можно осуществить любой закон регулирования.
При Тд==0 и бесконечно большом значении Ти получим П-регуля-тор. При Т=0, устанавливая достаточно малые значения К. и Ти, но так, чтобы отношение К/Ти было существенным, получим И-регулятор. При Т==0 и конечных значениях К и Ти будем иметь ПИ-регулятор, а при бесконечно большом значении Ти и конечных значениях К. и Тд — ПД-регулятор.