

§ 5. Устройства дистанционного контроля глубинных параметров бурения с электрическим каналом связи
Датчик осевой нагрузки на долото представляет собой упругий элемент, изготовленный в виде трубы небольшой длины, монтируемой в колонне бурильных труб непосредственно над электробуром. При этом датчик будет воспринимать нагрузку на долото, за исключением веса электробура.
Устройство двух вариантов датчика показано на рис. 10.8. Отличие между ними заключается в том, что у одного измеритель перемещения установлен снаружи упругого элемента (рис. 10.8,а), а у другого—внутри него по оси (рис. 10.8,6).
Датчик осевой нагрузки первого типа имеет чувствительный элемент 2 с присоединительными резьбами на концах и с утонченной средней частью (выточкой), к торцевым поверхностям которой кренятся кронштейны 5 со смонтированными индуктивными преобразователями перемещений 4 и / на концах. Для компенсации погрешности от температурных деформаций кронштейны изготовляют из того же материала, что и упругий элемент. Упругая деформация чувствительного элемента приводит к изменению зазора магнитной цепи преобразователя. Для исключения влияния изгибающих усилий на измерение осевой нагрузки устанавливают три пары индукционных катушек, отстоящих друг от друга на 120°. В этом случае при деформации изгиба суммарный зазор между тремя парами катушек не изменяется. Стакан 6, уплотненный резиновыми кольцами 3, предусмотрен для предохранения преобразователя от повреждения. Внутренняя полость между стаканом и упругим элементом заполнена трансформаторным маслом. Компенсация внешнего давления осуществляется с помощью лубрикатора 8. Соединительные провода от преобразователей выведены через каналы 7 и через уплотняющие вводы подключены к контейнеру с телеметрической аппаратурой Кабель 9 электробура проходит в центральном канале упругого элемента. Наружный диаметр корпуса датчика равен 185 мм, длина 900 мм, максимальная допустимая нагрузка 150 кН.
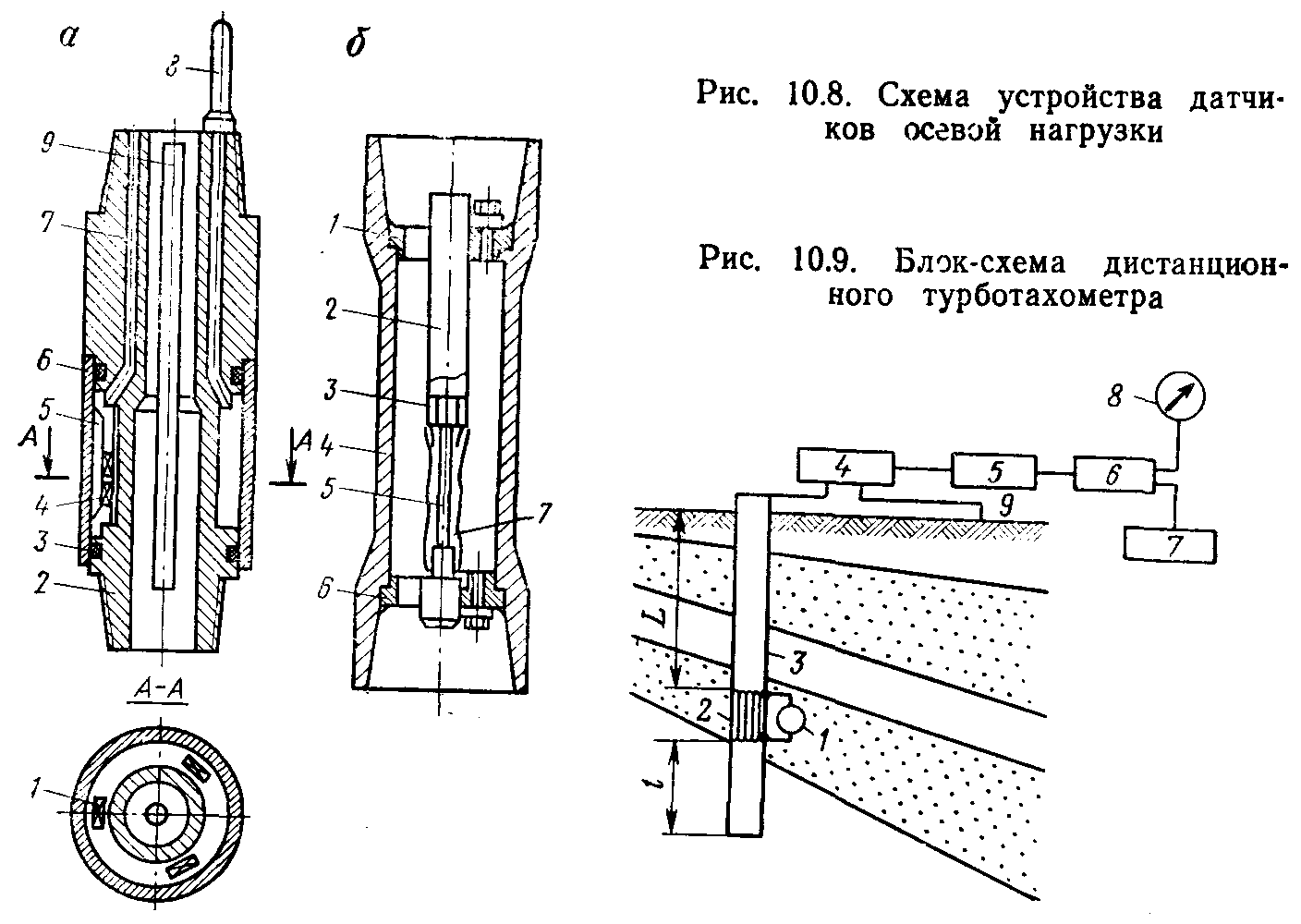
У датчика осевой нагрузки второго типа (рис. 10.8,б) чувствительный элемент 4 длиной около 1 м имеет внутренние присоединительные резьбы на концах. Измеритель деформации представляет собой индуктивный преобразователь, у которого магнитопровод 3 с обмотками жестко закреплен на кронштейне 2, а сердечник—на штоке 5 Кронштейн 2 неподвижно закреплен на опорном кольце 1, а положение штока 5 может регулироваться при настройке датчика, после чего он закрепляется жестко на кольце 6.
Кронштейн, шток и детали крепления преобразователя изготовлены из того же материала, что и чувствительный элемент. Этим достигается компенсация температурной деформации Кабель располагается в трубе эксцентрично, а лубрикатор 7—по центру. Наружный диаметр датчика равен 185 мм, длина—около 1 м.
Турботахометр. Схема дистанционного турботахометра, предназначенного для измерения частоты вращения выходного вала турбобура с электрическим каналом связи, состоящим из колонны труб и окружающей породы, приведена на рис. 10.9.
В качестве глубинного измерительного устройства 1 применен тахогенератор магнитоэлектрической системы, приводимый во вращение от вала турбобура. При вращении ротора тахогенератора в обмотках его статора возбуждается переменная эдс, частота которой пропорциональна частоте вращения вала в единицу времени. Зажимы обмотки статора соединены с электрически изолированными частями колонны бурильных труб L и I специальным изолятором — разделителем 2. Это дает возможность использовать в качестве активной части устройства ввода сигнала нижнюю часть бурового инструмента длиной l, практически равной длине турбобура. Разность потенциалов между колонной труб 3 на устье скважины и заземлителем 9 подается на приемную аппаратуру, содержащую фильтр низких частот 4, усилитель 5, частотомер 6, регистрирующий 7 и показывающий 5 приборы, Частота тока, измеряемая частотомером, пропорциональна частоте вращения турбобура.
Шкала вторичного показывающего прибора градуируется в единицах частоты вращения.
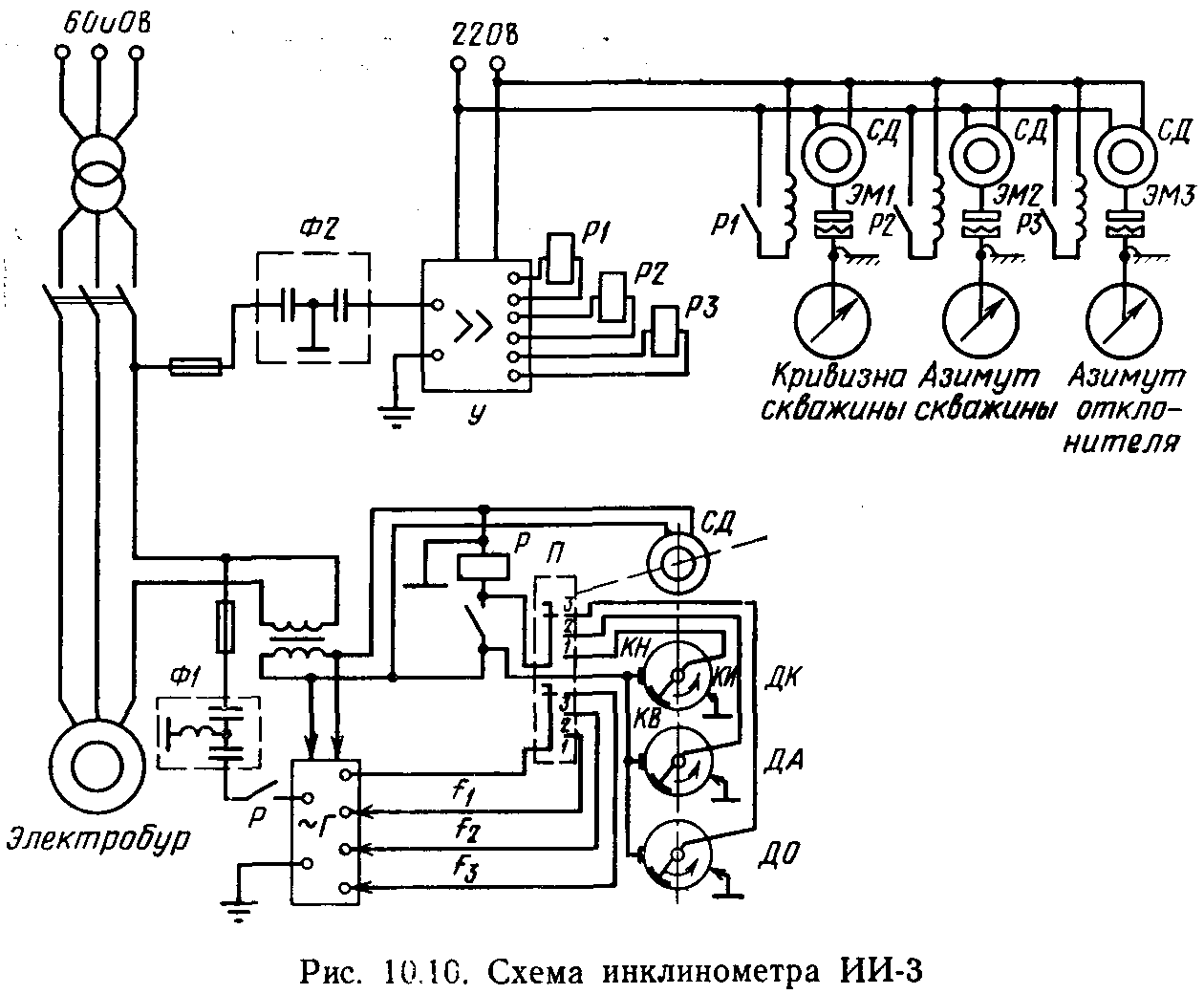
Инклинометр типа ИИ-3 (рис. 10.10). Предназначен для измерения кривизны скважин. Прибор состоит из глубинного измерительного устройства и наземной аппаратуры. Измерительные импульсы с забоя скважины передаются по силовому кабелю электробура. В инклинометре применены времяимпульсные системы телеизмерения и частотное разделение измерительного и силового каналов.
Глубинный прибор встраивают в отрезок бурильной трубы длиной 3,5 м, изготовленный из немагнитной стали. На оба ее конца навинчивают трубы-удлинители из немагнитного материала. Трубу с инклинометром устанавливают между электробуром и колонной бурильных труб. Три датчика выдают во вторичный прибор сигналы,. соответствующие значениям кривизны скважины (датчик угла кривизны ДК), азимута скважины (датчик азимута ДА) и угла направления отклонителя (датчик отклонителя ДО).
Все датчики выполнены контактными. Каждый из них имеет нулевой контакт К.Н, измерительный контакт КИ, укрепленный на стрелке чувствительного элемента, и вращающийся — опрашивающий контакт КВ. Контакты KB приводятся во вращение одним синхронным двигателем СД, частота вращения вала которого 2 об/мин. Кривизну скважины определяют по углу между касательной к траектории скважины и вертикалью, азимут—по углу между горизонтальной проекцией касательной к траектории и направлением земного магнитного меридиана, угол направления отклонителя — по углу между плоскостью, в которой расположен отклонитель, и вертикальной плоскостью, проходящей через ось скважины.
В качестве чувствительных элементов датчиков применены: в ДА — магнитная стрелка, в ДК — маятник-отвес, в ДО—ось с эксцентричным грузом.
Вращаясь, контакты KB поочередно замыкают контакты К.Н и КИ. При замыкании первого контакта начинается измерение, при замыкании второго — измерение прекращается. Продолжительность импульса пропорциональна углу поворота КИ относительно контакта КН, а следовательно, и значению измеряемых параметров.
Переключателем П датчики поочередно подключаются к цепи реле Р и управляют его включением и отключением. При замыкании контактов КН и KB любого из подключенных датчиков реле включается и самоблокируется до момента замыкания контактов КИ и KB того же датчика. При включении реле Р его нормально открытый контакт включает высокочастотный генератор Г, измерительный сигнал посылается на поверхность. Соответственно трем измеряемым параметрам генератор выдает три фиксированных частоты (в кГц):
f1=45, f2=35, f3=25. Переключение частот осуществляется переключателем П синхронно с переключением датчиков. Продолжительность всего цикла составляет 7,5 мин, а измерения каждого параметра — 2,5 мин.
С учетом, что механическая скорость бурения сравнительно низка, такая периодичность измерения вполне достаточна для того, чтобы получить необходимое число точек вдоль траектории скважины. Цепи сигнала ГИУ и НИУ подключены к токйподводу присоединительными филырами Ф1 и Ф2. Питание устройства инклинометра осуществляется от токового насыщающего трансформатора. Измерительные сигналы, поступающие в наземные измерительные устройства, усиливаются в трехканальном усилителе У и вызывают срабатывание реле PI, P2 и РЗ в соответствии с частотой сигнала. Приемное реле управляет включением электромагнитных муфт сцепления ЭМ1, ЭМ2 и ЭМЗ указывающих приборов. При включении муфты стрелка прибора отклоняется на угол, соответствующий продолжительности измерительного импульса, а следовательно, и значению измеряемого параметра.
В инклинометре ИИ-За (рис. 10.11) электромагнитное реле формирования измерительных импульсов в глубинном снаряде заменено гиратронным реле, а измерительные датчики включаются с поверхности по «вызову».
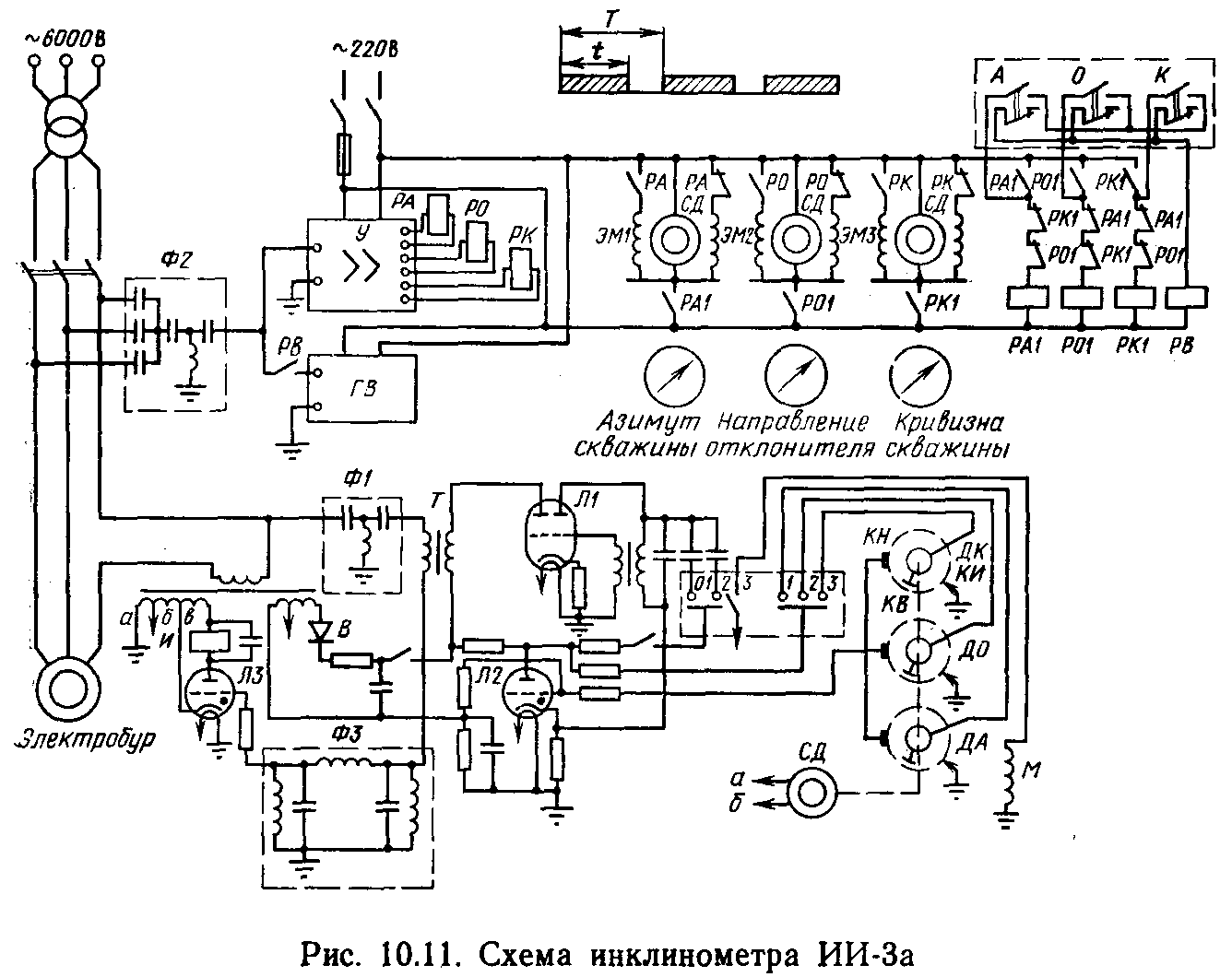
В глубинном снаряде применены те же датчики, высокочастотный генератор (на лампе Л1), присоединительный фильтр и токовый трансформатор, что и в инклинометре ИИ-3. Переключение датчиков я фиксированных частот генератора путем изменения емкости в контуре задающего каскада осуществляется реле-искателем И, включенным в анодную цепь тиратрона Л3. Это реле реагирует на сигналы вызова частоты 10 кГц, посылаемые с поверхности от генератора вызова ГВ. Пройдя присоединительные фильтры Ф2 и Ф1, первичную обмотку трансформатора Т и полосовой фильтр ФЗ, вызывной сигнал поступает на сетку тиратрона Л3, вследствие чего зажигается и срабатывается реле-искателя. При отсутствии сигнала вызова тиратрон гаснет. Анодная цепь его питается переменным напряжением.
Чтобы переключить контакты реле с одного положения на другое посылается сигнал вызова в течение некоторого промежутка времени формирование измерительных сигналов осуществляется воздействием датчика на режим генерации высокочастотного тока. При замыкании контактов КН и KB одного из подключенных датчиков ДК. ДО или ДА на сетку тиратрона Л2 подается положительное напряжение, тиратрон зажигается и включает цепь анодного напряжения генератора. При замыкании контактов KB и КИ он шунтируется—выключается анодное питание генератора. Применение тиратрона для управления работой генератора позволяет значительно уменьшить токи через контакты датчика, вследствие чего на работе схемы практически не сказывается переходное сопротивление контактов.
Для питания анодных цепей генератора применен однополупериодный выпрямитель В. В датчике азимута предусмотрено арретирование магнитной стрелки в момент измерения при помощи механизма с кулачком, вращаемым двигателем СД. Переданный на поверхность измерительный сигнал поступает на вход трехканального усилителя У, каждый канал которого является двухкаскадным резонансным усилителем с электронным реле на выходе.
В соответствии с частотой сигнала срабатывает одно из трех реле (РА, РО или РК), которое включает электромагнитные муфты ЭМ указывающих приборов (приборы те же, что и в инклинометре ИИ-3).
Генератор вызывного сигнала состоит из задающего генератора Г и двухтактного каскада мощности. Инклинометр управляется кнопками А, О и К, которые включают реле РА1, РК1 и РВ1. Конструктивное оформление глубинного снаряда и наземной аппаратуры инклинометров ИИ-3 и ИИ-За аналогично.