

Измерение крутящего момента
Главная цель контроля крутящего момента—предупреждение больших его значений, которые могут привести к скручиванию и обрыву колонны бурильных труб. Кроме того, измерение крутящего момента в сочетании с измерением осевой нагрузки позволяет судить о состоянии скважин, о характере разбуриваемых пород и о техническом состоянии породоразрушающего инструмента. Исследования показывают, что 75—80% времени опоры шарошек долота работают в условиях постепенного износа, после чего наступает резкое увеличение износа, разрушение и заклинивание опоры. Возникающее при этом значительное увеличение крутящего момента указывает на необходимость прекращения долбления и замены долота.
Измерение момента на валу привода позволяет избежать многих осложнений в процессе бурения. Так, во время проводки глубоких, наклонных или искривленных скважин, когда инструмент «зависает», а индикатор веса не «чувствует» нагрузку на забой, для косвенного контроля нагрузки на долото применяют моментомер. Он позволяет своевременно обнаружить начало образования сальника, значительно облегчает проведение ловильных работ, а при аварийном перебуривании ствола избавляет от опасности зарезки в ствол, закрепленный обсадной колонной. Моментомер незаменим для обнаруживания заклинивания опор долота. Во всех случаях этот прибор может работать как индикатор, абсолютные показания которого не интересны.
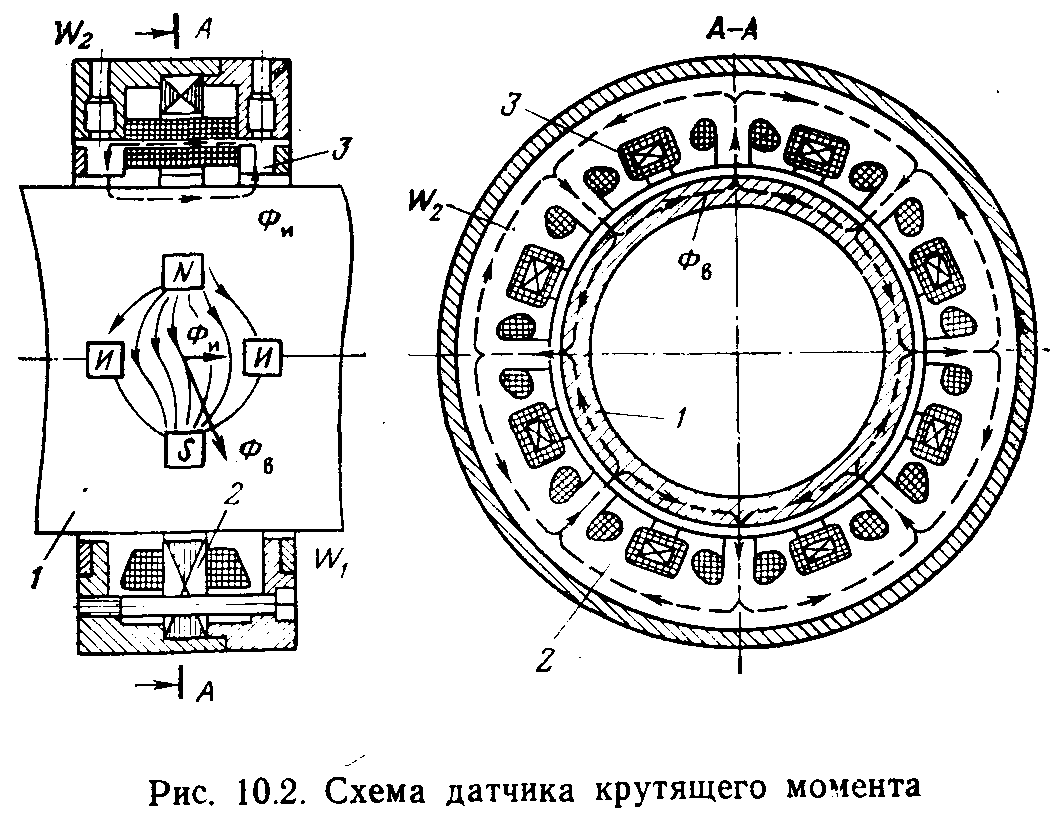
На рис. 10.2 приведена схема датчика типа ДМ, принцип действия которого заключается в использовании явления магнитоупругости вращающегося вала, передающего крутящий момент. Этот датчик конструктивно состоит из рабочего вала / и неподвижно закрепленной в корпусе кольцевой электромагнитной системы, через отверстие которой свободно проходит вращающийся вал. Под действием приложенного крутящего момента в нем возникают механические напряжения, которые приводят к изменению его магнитных характеристик. Кольцевая электромагнитная система совместно с охваченным ею участком рабочего вала образует электромагнитный преобразователь. Электромагнитная система состоит из двух цепей: возбуждения и измерительной. Цепь возбуждения представляет собой кольцевой многополюсный статор 2 с катушками W1, которые включаются последовательно, обеспечивая чередование полюсов. Ток в цепи возбуждения создает в материале вала магнитные потоки, пути которых показаны на рис. 10.2. Измерительная цепь представляет собой совокупность П-образных магнитопроводов 3, расположенных вдоль оси вала между полюсами возбуждения с измерительными катушками W2, включенными последовательно.
При отсутствии крутящего момента и полной однородности вала чувствительного элемента суммарный магнитный поток возбуждения Фв направлен под прямым углом к оси измерительной катушки, и поэтому эдс в этих катушках не наводится.
Возникающие под действием крутящего момента механические напряжения приводят к такому изменению магнитных характеристик материала вала (чувствительного элемента), при котором магнитный поток направляется под некоторым (непрямым) углом к оси измерительной катушки. При этом появляется составляющая магнитного потока Фц, наводящая в измерительной катушке W2 эдс. Изменение направления скручивания приводит к изменению фазы выходного сигнала на 180°. Индуцированная эдс в измерительной обмотке измеряется соотношением
![]()
где К.—коэффициент пропорциональности; В—индукция, создаваемая обмоткой возбуждения; Rм — магнитное сопротивление вала на участке между полюсами одного П-образного магнитопровода; С — коэффициент магнитоупругости; Rми. — магнитное сопротивление цепи измерительной обмотки; σmax — максимальное значение напряжения во вращающемся вале (σmах не должно превышать 0,3 МПа).
Магнитопроводы датчика выполнены из листовой трансформаторной стали. Магнитная система датчика с обмотками после сборки и проверки заливается эпоксидной смолой, что обеспечивает защиту от механических повреждений и герметизирует от внешней среды.
Характеристика датчика E=f(M) достаточно линейна и при диаметре его вала, равном 90 мм и изготовленном из стали марки 38ХМЮА, выражается зависимостью:
![]()
где Е— напряжение, В; М—момент силы, Н*м.
Длина участка вала, являющегося чувствительным элементом, изменяется в пределах 80—100 мм. На этой длине вал должен иметь один и тот же наружный и внутренний диаметры без каких-либо кольцевых расточек и шлицевых пазов.
Биение кольцевой магнитной системы датчика относительно вала—чувствительного элемента—не должно превышать 0,1 мм. Датчики ДМ обладают незначительной чувствительностью к осевым усилиям, действующим на вал—чувствительный элемент. К их недостаткам следует отнести зависимость коэффициента преобразования от частоты вращения вала.
Схема моментомера для определения измеряемого параметра по натяжению цепи привода ротора показана на рис. 10.3. Изменение усилия цепи 1 привода ротора через ролик 3, закрепленный на рычаге 2, и упругий элемент 4 передается трибосекторному механизму 5,

который поворачивает ось ротора малоинерционного сельсина 6 датчика типа БС-3 на угол, пропорциональный измеряемому моменту. Сельсин 6 по трансформаторной схеме подключен к приемному сельсину 7 указателя. Сигнал рассогласования сельсинов через фазосдвигающую R—C цепочку подается на вход усилителя, выход которого подключен к управляющей обмотке реверсивного двигателя РД-09. Двигатель на оси имеет стрелку 8 указателя. Сельсин 7 механически связан с сельсином 9, который по индикаторной схеме подключен к сельсину 10. На оси ротора сельсина 10 закреплен кулачок 11, который управляет пером 12, записывающим изменение момента на диаграммном бланке.
Поскольку роторная цепь передает на датчик момента резкие динамические нагрузки с частотой в несколько герц, что может вызвать размазывание записи, быстродействие прибора замедлено применением двигателя РД-09 с передаточным числом i=l/l37. Измеритель момента на роторе ИМР-2 имеет диапазоны измерения крутящего момента 0—30 кН*м, основная приведенная погрешность усилия, действующего на датчик, составляет ±2,5%.
Датчик момента монтируется в специальном приспособлении, которое преобразует натяжение движущейся цепи в усилие, действующее на неподвижный датчик.