

§ 2. Поплавковые и буйковые уровнемеры
В СССР и за рубежом для измерения уровня нефти и нефтепродуктов в резервуарах наиболее широко применяют поплавковые уровнемеры. Это обусловлено простотой их конструкции, достаточно высокой точностью, надежностью и сравнительно низкой стоимостью. Кроме того, эти уровнемеры удобны для товароучетных операций в резервуарных парках.

Наиболее распространены поплавковые уровнемеры, серийно выпускаемые нашей промышленностью, типа УДУ различных модификаций (табл. 8.1). Принцип действия их основан на следящем действии поплавка, плавающего на поверхности жидкости.
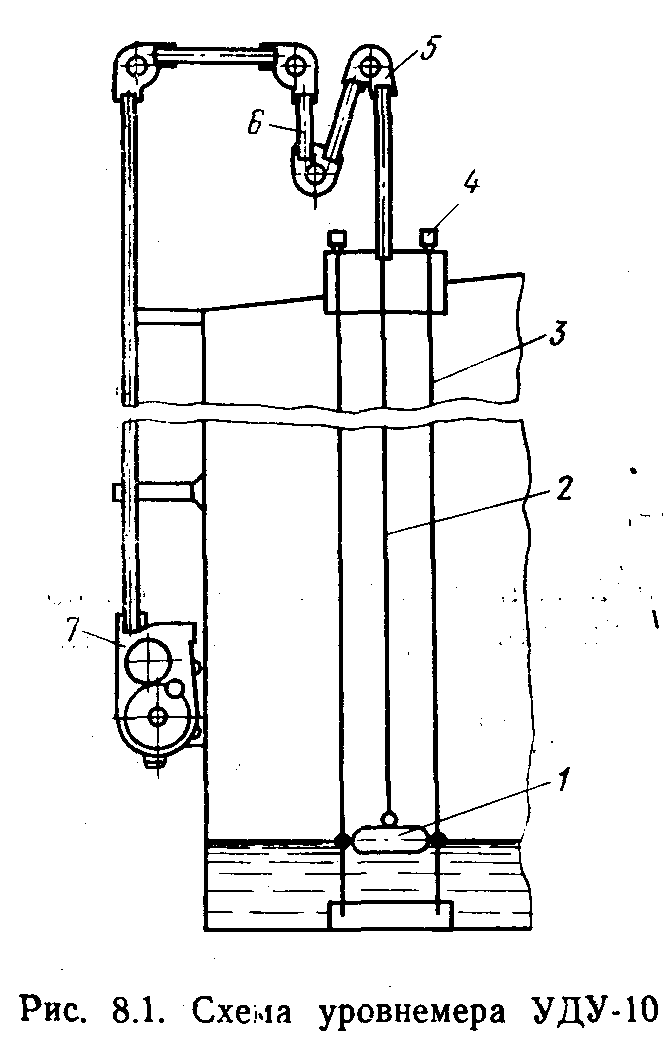
Схема уровнемера УДУ-10, являющегося основной базовой конструкцией, показана на рис. 8.1. Поплавок 1, подвешенный на перфорированной мерной ленте 2, при движении скользит вдоль направляющих струн 3. Струны жестко закреплены на днище резервуара и натянуты гайками 4, установленными на крышке верхнего люка резервуара. Лента по роликам 5 проходит через гидрозатвор 6 и вращает мерный шкив 7. Последний вращает механизм счетчика, показания которого соответствуют уровню нефтепродукта в резервуаре. Натяжение мерной ленты обеспечивается пружинным двигателем постоянного момента.
Счетный механизм представляет собой десятичный счетчик с тремя малыми барабанами и одним большим, который по окружности имеет 100 делений. Цена одного деления составляет 1 мм.
У
УДУ-10 может быть смонтирован на резервуарах различных типов. Абсолютная погрешность при местном отсчете равна 4 мм, погрешность дистанционной передачи с потенциометрической приставкой ±15 мм.
Для измерения уровня жидкости в сосудах с высоким давлением применяют уровнемеры с буйковым чувствительным элементом, принцип действия которого основан на изменении силы тяжести буйка при изменении глубины погружения его в жидкость.
В состав ГСП входят буиковые уровнемеры с пневматическим преобразователем УБ-11 и с электрическим преобразователем УБ-Э.
Приборы состоят из унифицированных пневмо- и электросиловых преобразователей и измерительного блока. Описание преобразователей дано в гл. 3.
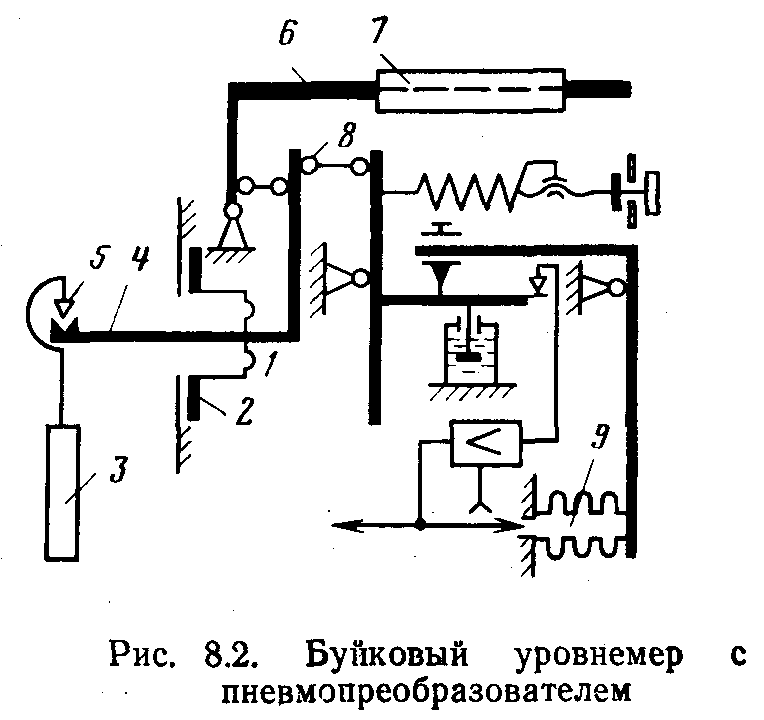
На рис. 8.2 показан пневматический буйковый уровнемер типа УБ-П, в котором измерительный блок, так же как и в электрических буйковых уровнемерах типа УБ-Э, представляет собой рычажную систему с чувствительным элементом в виде буйка 3. Буек подвешен к рычагу 4 при помощи призмы 5. Вывод рычага 4 из полости рабочего давления уплотнен с помощью одногофровой металлической мембраны 1. Начальный вес буйка уравновешивается специальным грузом 7, навинченным на плечо дополнительного рычага 6. Основание 2 имеет фланец, который служит для крепления датчика к аппарату.
Принцип действия датчика основан на пневматической силовой компенсации. Изменение уровня жидкости, в которую погружен буек 3, приводит к изменению усилия, приложенного к рычагу 4. Это усилие через тягу 8 передается рычагу пневмосилового преобразователя и автоматически уравновешивается усилием, развиваемым давлением сжатого воздуха в сильфоне 9 обратной связи преобразователя. Давление обратной связи одновременно является выходным сигналом датчика.
Наибольшее усилие рычаг 4 воспринимает в том случае, когда буек 3 не погружен в жидкость. Этому нулевому значению уровня соответствует выходной сигнал, равный 100 КПа. При увеличении уровня жидкости, в результате увеличения выталкивающей силы, усилие, приложенное к рычагу 4, уменьшается и при полном погружении буйка в жидкость выходной сигнал равен 20 КПа. Класс точности приборов 1,0 и 1,5.