

3. Расчет усилителя мощности
У М
состоит из моста с транзисторными
ключами (рис. 2) и блока управления
(рис.3). Выходным сигналом УМ является
постоянная составляющая напряжения
диагонали моста Uум
, а входным – напряжение предварительного
усилителя Uпу
.
М
состоит из моста с транзисторными
ключами (рис. 2) и блока управления
(рис.3). Выходным сигналом УМ является
постоянная составляющая напряжения
диагонали моста Uум
, а входным – напряжение предварительного
усилителя Uпу
.
Рис. 2. Мост с транзисторными ключами

Рис.3 Блок управления
Принимаем наибольшую относительную замкнутость ключей моста m=0,9 и наибольшее значение напряжения предварительного усилителя Uпу мах=10 В.
Напряжение питания моста U0 и максимальный ток коллекторов транзисторных ключей в режиме пуска Ik мах.
![]()
Транзисторы моста выбираем из условий:
Uкэ доп.>U0 ; Iк доп.>Iк мах ; I м =Iк мах/<Iфт. доп ,
где: Iфт.доп=0,2А – допустимый ток фототранзистора оптопары типа АОТ11ОГ.
Выбираем транзистор КТ865А.
Таблица 3. Технические данные кремниевого p-n-p транзистора КТ865А
Тип |
Uкэ , B |
Iк , A |
|
Ркэ, Вт |
КТ 865 А |
200 |
10 |
40 |
100/1,5* |
Напряжение выпрямителей цепей фототранзисторов равно Ub=10 B.
Добавочные сопротивления выбираем из условия:
ry = Ub / Iфт. доп< rу < Ub / I мах.
Тогда:
ry = Ub / Iфт. доп = Ub / I мах = 50 Ом
Блок управления работает по вертикальному принципу. Мультивибратор МВ, настроенный на частоту f0=400Гц, вырабатывает на вторичных обмотках напряжение в форме меандра.
Напряжение Ur поступает на вход интегратора, выполненного на операционном усилителе ОУ1. Опорное напряжение Uоп на выходе интегратора, имеющего пилообразную форму, сравнивается компаратором К1 с напряжением предварительного усилителя.
Широтно-модулированные импульсы подаются на светодиоды оптопары. Для обеспечения требуемого закона модуляции управляющих напряжений ключей моста применяется инвертирование. Опорное напряжение инвертируется инвертором на операционном усилителе ОУ2, а выходные сигналы компараторов логическими элементами «НЕ».
Период чередования импульсов напряжения на нагрузке равен полупериоду меандра Тчи=1/(2.f0)=1,25.10-3с.
Выходные напряжения компараторов и логических элементов подаются на светодиоды оптопар ОП1-ОП4. Напряжения управления Uу1-Uу4, подводимые к транзисторам моста, повторяют в определенном масштабе форму импульсов на светодиодах Uд1-Uд4 и соответствуют состояниям проводимости транзисторных ключей моста.
Выбираем Ur = 10В и ёмкость интегратора С = 0,1 мкФ = 10-7 Ф.
Амплитуда опорного напряжения равна Ur. Постоянная времени интегратора Tи=1/Kи=R.C определяется из условия:
![]()
Тогда Kи = 1.6∙103 с-1
Постоянная времени интегратора: Ти = 1/Kи = 6.25∙10-4 с
Коэффициент усиления усилителя:
![]()
4. Расчет коэффициента усиления разомкнутой системы, электромеханической постоянной времени двигателя и запаса по фазе нестабилизированной системы.
Для системы с двигателем постоянного тока эта схема представлена на рис. 5. В неё входят измерительное устройство ИУ, демодулятор ДМ, предварительный усилитель ПУ, усилитель мощности УМ, двигатель ДВ, редуктор Р, нагрузка Н.
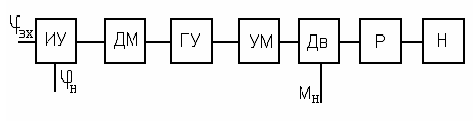
Рис. 1. Разомкнутая нестабилизированная система.
![]()
![]() - постоянная времени
двигателя;
- постоянная времени
двигателя;
![]() - коэффициент
усиления двигателя по напряжению;
- коэффициент
усиления двигателя по напряжению;
![]() - коэффициент
усиления двигателя по моменту.
- коэффициент
усиления двигателя по моменту.
С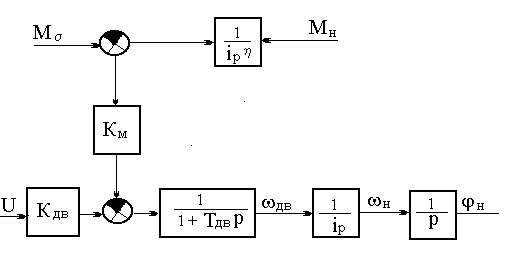 труктурная
схема ДПТ с учетом редуктора и нагрузки
показана на рис.6.
труктурная
схема ДПТ с учетом редуктора и нагрузки
показана на рис.6.
Рис. 2. Структурная схема двигателя постоянного тока.
Передаточная функция разомкнутой системы с двигателем постоянного тока имеет вид:
![]() ,
где
,
где
![]()
4.1. Режим равномерной заводки
В режиме равномерной
заводки ошибка системы
![]() складывается из трех составляющих:
ошибки измерителя рассогласования
складывается из трех составляющих:
ошибки измерителя рассогласования
![]() ,
статической ошибки
,
статической ошибки
![]() и
кинетической ошибки
и
кинетической ошибки
![]() .
Люфтом редуктора в расчетах пренебрегаем.
.
Люфтом редуктора в расчетах пренебрегаем.
![]() ,
,
![]() ,
,
![]() - ошибка
сельсина-датчика,
- ошибка
сельсина-датчика,
![]() - ошибка
сельсина-приемника.
- ошибка
сельсина-приемника.
В установившемся режиме:
Таким образом, общий коэффициент усиления разомкнутой системы:
Максимально допустимая ошибка системы в режиме равномерной заводки равно:
![]()
Измеритель на сельсинах 1-го класса точности. Его ошибка будет равна:

Минимальный коэффициент усиления разомкнутой системы в этом случае:
K1p > 115.297 ≈ 116
Для измерителя на сельсинах 2-ого класса имеем:

K2p > 254.472 ≈ 255
Для измерителя на сельсинах 3-его класса точности имеем:
![]()
Ошибка измерительного устройства превышает допустимую ошибку системы в режиме равномерной заводки. Использование такого измерителя невозможно.
4.2 Режим синусной заводки
Динамическая
ошибка
![]() системы определяется при отработке
синусоидального воздействия с параметрами
эквивалентной синусоиды
системы определяется при отработке
синусоидального воздействия с параметрами
эквивалентной синусоиды
![]() ,
которые находятся из системы уравнений:
,
которые находятся из системы уравнений:
![]()
Найденные значения:
![]()
Динамическая
ошибка меняется во времени по гармоническому
закону с амплитудой
![]() .
Поэтому в расчете амплитудное значение
этой ошибки связано с параметрами
эквивалентной синусоиды в виде:
.
Поэтому в расчете амплитудное значение
этой ошибки связано с параметрами
эквивалентной синусоиды в виде:
![]()
Это соотношение
определяет положение модуля частотной
характеристики на частоте
![]() :
:
![]()
4.3 Построение ЛАЧХ нескорректированной системы
ЛАЧХ разомкнутой нескорректированной системы должна проходить выше контрольных точек, определяемых следующими соотношениями.
На единичной частоте (в зависимости от класса точности сельсина):
![]() - для 1 класса
точности.
- для 1 класса
точности.
![]() - для 2 класса
точности.
- для 2 класса
точности.
На частоте
![]() :
:
![]()
Сопрягающая частота:
![]()
Выберем в качестве
измерительного устройства сельсин 1-го
класса. В этом случае
![]() ,
примем
,
примем
![]() .
.
ЛАЧХ и ЛФЧХ нескорректированной системы:


Рассчитаем частоту среза:
Определим запас по фазе:
![]()
Запас по фазе системы меньше требуемого, следовательно, необходима коррекция системы с помощью гибкой обратной связи.