

2. Непараметрические методы классификации.
В настоящем параграфе рассматриваются методы оценки плотностей и методы классификации наблюдений, не предполагающие известных (с точностью до параметров) плотностей наблюдений, принадлежащих к разным классам. Однако мы будем предполагать наличие обучающих выборок из каждого класса. В параметрических задачах классификации эти выборки служили для оценки неизвестных параметровплотностей, т. е. для оценок самих этих плотностей. В непараметрических задачах они необходимы также для оценки плотностей, только теперь это будут так называемые непараметрические оценки плотностей, в некотором смысле - многомерный аналог гистограммы.
Методы классификации, опирающиеся на эти оценки, как и в работе [7] будем называть локальными, так как отнесение наблюдения Z к тому или иному классу будет зависеть от ближайших к нему точек обучающих последовательностей. Поэтому требуются дополнительные предположения относительно понятия близости наблюдаемых точек.
а) Методы,
использующие понятие близости.
Понятие близости можно задавать,
например, следующим образом. Определим
в пространстве наблюдаемых признаков
![]() некоторую окрестность
некоторую окрестность![]() точки 0 =(0,0,..,0).
точки 0 =(0,0,..,0).
Задаваясь
произвольным действительным числом r
> 0 и сопоставляя каждой точке U
из окрестности нуля
![]() точку
точку![]() ,
мы получим отображение окрестности
,
мы получим отображение окрестности![]() в некоторую подобную ей окрестность
в некоторую подобную ей окрестность![]() .
Меняяr,
будем иметь систему подобных окрестностей
.
Меняяr,
будем иметь систему подобных окрестностей
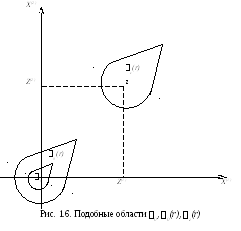
![]() около точки 0. Тогда для произвольной
точкиZ
при заданном виде окрестности нуля
около точки 0. Тогда для произвольной
точкиZ
при заданном виде окрестности нуля
![]() можно
рассмотреть соответствующие подобные
окрестности (см. рис. 1.6).
можно
рассмотреть соответствующие подобные
окрестности (см. рис. 1.6).
![]() .
.
Таким образом,
очевидно, что при заданных
![]() иZ
для любой p-мерной
точки факторного пространства
иZ
для любой p-мерной
точки факторного пространства
![]() можно определить множество действительных
чисел
можно определить множество действительных
чисел![]() таких, что
если только
таких, что
если только
![]() ,
то
,
то![]() .
.
Соответственно
полагают, что из двух точек Х
и Y
точка Х
расположена ближе к точке Z
(в смысле окрестности
![]() ,
чем точкаY,
если
,
чем точкаY,
если
![]() .
.
Обычно понятие
близости точек наиболее естественно
вводится через расстояние
![]() в пространстве признаков. В этом случае
области
в пространстве признаков. В этом случае
области![]() превращаются в систему «сфер» радиусаr
и центром в точке Z.
превращаются в систему «сфер» радиусаr
и центром в точке Z.
Приведем вначале несколько способов классификации объекта Z, а затем остановимся более подробно на различных локальных оценках плотностей и отношений правдоподобия в точке Z, на основании которых производится классификация.
Методы классификации точки Z могут состоять в следующем.
1) В зависимости от объемов обучающих выборок определяется число k:
- рассматривается k ближайших к Z точек из обучающих выборок;
- точка z
относится к тому классу i,
из которого в числе k
ближайших точек присутствует больше
точек, чем точек из любого другого класса
![]() .
.
При двух классах и нечетном k этот метод наиболее хорошо изучен [12] и обязательно относит точку Z к одному из классов.
2) В зависимости от объемов mi обучающих выборок класса i выбираются числа ki:
- около точки Z
для каждого i
строится окрестность
![]() наименьшего радиусаi
такая, что она содержит не менее ki
точек из обучающей выборки класса i.
Заметим, что определенный таким образом
радиус i
является величиной случайной;
наименьшего радиусаi
такая, что она содержит не менее ki
точек из обучающей выборки класса i.
Заметим, что определенный таким образом
радиус i
является величиной случайной;
- точка Z
относится к тому классу i,
для которого
![]() .
.
3) По непараметрическим
оценкам плотностей около точки Z
и, следовательно, по оценке функций
![]() (или разделяющих поверхностей), точкаZ
относится к одному из классов аналогично
тому, как это делалось в § 2 настоящей
главы.
(или разделяющих поверхностей), точкаZ
относится к одному из классов аналогично
тому, как это делалось в § 2 настоящей
главы.
Приведем некоторые
общие результаты, которые показывают
состоятельность наиболее изученного
метода классификации (метод 1) на два
класса при
![]() и
и![]() .
Через
.
Через![]() обозначим плотность распределения
точек, принадлежащих к одному классу,
а через
обозначим плотность распределения
точек, принадлежащих к одному классу,
а через![]() - число точек обучающей последовательности,
попавших в область
- число точек обучающей последовательности,
попавших в область![]() .
.
Теорема 2 [11].
Если
![]() - непрерывная функция в точкеZ
и
- непрерывная функция в точкеZ
и
![]() при
при![]() ,
,![]() ,
то величина
,
то величина

является состоятельной
оценкой плотности
![]() в точкеZ.
в точкеZ.
Для евклидова
расстояния и сферы
![]() аналогичные результаты получены в
работе [14].
аналогичные результаты получены в
работе [14].
Если
![]() и точки обучающих последовательностей
и точки обучающих последовательностей![]() и
и![]() упорядочены в порядке возрастания
расстояний
упорядочены в порядке возрастания
расстояний![]() ,
,![]() от точкиZ
и взята k-я
по расстоянию от Z
точка
от точкиZ
и взята k-я
по расстоянию от Z
точка
![]() ,
то через
,
то через![]() будем обозначать число точек из
последовательности
будем обозначать число точек из
последовательности![]() с меньшими (не большими) чем
с меньшими (не большими) чем![]() расстояниями доZ,
а через
расстояниями доZ,
а через
![]() - число таких же точек из последовательности
- число таких же точек из последовательности![]() .
В этом случае справедлива следующая
теорема.
.
В этом случае справедлива следующая
теорема.
Теорема 3 [7].
Если плотности
![]() и
и![]() разных классов непрерывны в точкеZ
и число
разных классов непрерывны в точкеZ
и число
![]() выбрано так, что,
выбрано так, что,![]() ,
,![]() ,
,![]() при
при![]() ,
,![]() (но при этом
(но при этом![]() ),
то величина
),
то величина
![]() является состоятельной оценкой для
отношения плотностей
является состоятельной оценкой для
отношения плотностей![]() .
.
В случае, когда
семейство плотностей
![]() параметрическое и
параметрическое и![]() и
и![]() используется непараметрический критерий
для классификации точкиZ,
известна [11].
используется непараметрический критерий
для классификации точкиZ,
известна [11].
Теорема 4.
Если для всех
и для почти всех U
(по мере
![]() )
оценка
)
оценка![]() состоятельна для
состоятельна для![]() ,
то правило классификации
,
то правило классификации
![]() состоятельно
над семейством
состоятельно
над семейством
![]() .
С помощью теоремы 2 в работе [7] строится
состоятельная оценка для
.
С помощью теоремы 2 в работе [7] строится
состоятельная оценка для
![]() (метод 2)
(метод 2)
![]()
где p
- размерность каждого наблюдения, а ki
- фиксированное число точек в области
![]() .
.
В этом случае
![]() - асимптотически несмещенная (при
- асимптотически несмещенная (при![]() )
оценка
)
оценка![]() и ее можно использовать для оценки
отношения плотностей.
и ее можно использовать для оценки
отношения плотностей.
Если области
![]() различны для распределений
различны для распределений![]() и для
и для![]() ,
а
,
а![]() такие, что в область
такие, что в область![]() попадает равноk1
и k2
точек последовательностей
попадает равноk1
и k2
точек последовательностей
![]() и
и![]() ,
объемов
,
объемов![]() и
и![]() ,
то
,
то
является состоятельной оценкой отношения правдоподобия в точке Z.
При
![]() иk1
= k2
это правило совпадает с известным [11]
при
иk1
= k2
это правило совпадает с известным [11]
при
![]() (метод 1).
(метод 1).
В работе [7] предлагается выбирать величину
![]()
для
![]() .
Отличаясь от параметрических методов
меньшими требованиями на плотности,
локальный метод имеет ряд существенных
недостатков. Отметим лишь некоторые из
них:
.
Отличаясь от параметрических методов
меньшими требованиями на плотности,
локальный метод имеет ряд существенных
недостатков. Отметим лишь некоторые из
них:
при оценке отношения
правдоподобия
![]() используются лишь точки, входящие в
уменьшающуюся с ростом
используются лишь точки, входящие в
уменьшающуюся с ростом![]() окрестность классифицируемой точкиZ.
Это приводит к тому, что порядок сближения
(при
окрестность классифицируемой точкиZ.
Это приводит к тому, что порядок сближения
(при
![]() )
этого метода с наилучшим (основанном
на
)
этого метода с наилучшим (основанном
на![]() )
хуже, чем для параметрических процедур,
которые используют все данные обучения
при классификации точкиZ;
)
хуже, чем для параметрических процедур,
которые используют все данные обучения
при классификации точкиZ;
локальный метод
классификации требует большей
вычислительной работы при классификации
новых данных, чем при параметрическом
методе классификации и наличии обучения.
Например, при классификации нормальных
наблюдений с помощью линейной разделяющей
поверхности достаточно знать лишь р+ 1 чисел, а при локальном методе
классификации требуется помнить все![]() чисел.
чисел.
Локальный метод, устраняя одну трудность - наличие сведений об общем виде распределения наблюдений, - сразу же заменяет ее другой - трудностью выбора расстояния между точками-наблюдателями. Эту трудность можно преодолеть, как будет показано ниже, заменив ее другой неопределенностью.
Остановимся коротко на некоторой модификации правила классификации (1), описанного выше. Эта модификация для двух классов описана, например, в работе [13] и состоит в том, что можно для точки Z принимать, как описано в § 2, п. 4, три решения:
![]() - отнести точку к
классу i
(
- отнести точку к
классу i
(![]() )
и
)
и![]() - воздержаться от принятия решения.
- воздержаться от принятия решения.
Предлагается следующая процедура:
в зависимости от
![]() и
и![]() - числа точек обучающих последовательностей
выбираются числаk
и
- числа точек обучающих последовательностей
выбираются числаk
и
![]() ;
;
выбираются k
ближайших к точке Z
точек из множества
![]() точек обучающих выборок;
точек обучающих выборок;
точка Z
относится к классу i
(![]() ),
если в числеk
ближайших точек имеется более k'
точек из обучающей выборки класса i.
Если же этого не происходит, то принимается
решение
),
если в числеk
ближайших точек имеется более k'
точек из обучающей выборки класса i.
Если же этого не происходит, то принимается
решение
![]() .
Это означает, что в числе ближайших кZ
точек примерно поровну точек классов
1 и 2.
.
Это означает, что в числе ближайших кZ
точек примерно поровну точек классов
1 и 2.
В работе [13] показано,
что при априорных вероятностях классов
i,
![]() и
и![]() ,
,![]() ,
предлагаемая процедура сходится к
байесовской, описанной в § 2, п. 4, т. е.
является
,
предлагаемая процедура сходится к
байесовской, описанной в § 2, п. 4, т. е.
является![]() состоятельной.
состоятельной.
Очевидно, что при
k
нечетном и
![]() эта процедура совпадает с описанной в
работах [11] и [12].
эта процедура совпадает с описанной в
работах [11] и [12].
б) Методы,
использующие понятия весовой функции.
В пространстве выборочных точек можно
отказаться от введения расстояния, не
изменяя при этом качества алгоритмов
классификации (состоятельность и т.
д.). Но в этом случае приходится вводить
произвольную функцию веса
![]() ,
которая должна удовлетворять следующим
условиям [26].
,
которая должна удовлетворять следующим
условиям [26].
Функция K должна быть неотрицательна, симметрична, монотонно-мажорируема и интегрируема, т. е.
![]() ;
;
![]() ;
;
![]() ,где
,где
![]() при
при
![]() ;
;
 .
.
Вполне естественно,
что в качестве весовой функции
![]() можно взять любую интегрируемую в
области от 0 до
и неотрицательную функцию
можно взять любую интегрируемую в
области от 0 до
и неотрицательную функцию
![]() одномерного параметра, где вместо
аргументаz
стоит норма
одномерного параметра, где вместо
аргументаz
стоит норма
![]() .
Если
.
Если![]() еще и монотонно убывающая функция, то
последние условия автоматически
выполняются. Условие
еще и монотонно убывающая функция, то
последние условия автоматически
выполняются. Условие![]() без ограничения общности можно заменить
условием
без ограничения общности можно заменить
условием![]() и взять вместо функции веса
и взять вместо функции веса![]() мажоранту
мажоранту![]() ,
если мажоранта симметрична. Если выбрать
ещеp
последовательностей
,
если мажоранта симметрична. Если выбрать
ещеp
последовательностей
![]() ,
таких, что
,
таких, что![]() при
при![]() ,
а
,
а![]() при
при![]() ,
то можно получить оценку плотности в
точке
,
то можно получить оценку плотности в
точке![]()
![]() ,
,
где
![]() (
(![]() )
- точки обучающей выборки из какого-либо
класса.
)
- точки обучающей выборки из какого-либо
класса.
В этом случае при
вышеприведенных условиях можно доказать
[16], что оценка
![]() состоятельна в точках непрерывностиZ
плотности
состоятельна в точках непрерывностиZ
плотности
![]() ,
а величина
,
а величина

асимптотически
(![]() )
нормальна с математическим ожиданием
0 и единичной дисперсией.
)
нормальна с математическим ожиданием
0 и единичной дисперсией.
Легко проверить,
что последовательности
![]() удовлетворяют всем необходимым условиям.
Для таких последовательностей сходимость
оценкиf^
(Z) к плотности
удовлетворяют всем необходимым условиям.
Для таких последовательностей сходимость
оценкиf^
(Z) к плотности
![]() определяется скоростью убывания
дисперсии, равной
определяется скоростью убывания
дисперсии, равной
 .
.
Следовательно,
скорости сближения оценок в методах,
описанных в работе [7] и в работе [16],
совпадают для этого частного случая и
равны
![]() .
Очевидно, что функции
.
Очевидно, что функции
![]() и т. д.,
и т. д.,
на которых основаны методы классификации с помощью так называемых потенциальных функций (см. главу III), удовлетворяют всем необходимым условиям построения локальных оценок плотностей.
В работе [5] доказано,
что оценка плотности с весовой функцией
![]() обладает всеми приведенными выше
свойствами, хотя функция
обладает всеми приведенными выше
свойствами, хотя функция![]() может принимать и отрицательные значения.
Поэтому от условия неотрицательности
можно отказаться.
может принимать и отрицательные значения.
Поэтому от условия неотрицательности
можно отказаться.
в) Эвристический метод классификации1.
Пусть имеется
обучающая выборка
![]() (
(![]() )
объема
)
объема![]() ,
и эта выборка разбита наk
классов
,
и эта выборка разбита наk
классов
![]() .
Предъявляется элемент
.
Предъявляется элемент![]() ,
подлежащий классификации, и производится
подсчет числа голосов
,
подлежащий классификации, и производится
подсчет числа голосов
![]() за l-й
класс следующим образом. Выбирается
за l-й
класс следующим образом. Выбирается
![]() ,
гдер
- размерность пространства Х
и рассматриваются любые р'
координат p-мерного
вектора X.
Пусть этот набор координат обозначен
через П, а через
,
гдер
- размерность пространства Х
и рассматриваются любые р'
координат p-мерного
вектора X.
Пусть этот набор координат обозначен
через П, а через
![]() для любого
для любого![]() обозначается величина
обозначается величина
![]() .
.
Введем функцию
 .
.
Возьмем любой
вектор
![]() .
Определим величину
.
Определим величину
![]() .
.
Суммирование здесь
ведется по всевозможным наборам р'
координат из р
(число таких наборов- равно
![]() ).
Тогда величина
).
Тогда величина![]() равна
равна
![]() .
.
Пусть задано
некоторое число
![]() .
Вектор
.
Вектор![]() относится к тому классуl,
при котором
относится к тому классуl,
при котором
![]()
для всех
![]() .
Если такогоl
не существует, то вектор Z
не может быть классифицирован.
.
Если такогоl
не существует, то вектор Z
не может быть классифицирован.
В целях проверки качества классификации описанный выше алгоритм применяется для классификации элементов обучающей выборки. Затем подсчитывается некоторая величина Е, характеризующая качество алгоритма, которая выражается через число неправильно классифицированных объектов и через число объектов не классифицированных в процессе работы алгоритма. Очевидно, что значение Е зависит от (k, , ). Выбираются те значения k, , при которых Е достигает экстремума.