

Аналитическая геометрия
.doc
§14. Прямая в R3. 1
§15. Плоскость в R3. 3
§16. Задачи на прямую и плоскость в R3. 4
ТР по теме "Аналитическая геометрия". 6
§14. Прямая в R3.

Аксиома геометрии: «через точку проходит единственная прямая L, параллельная другой прямой».
На «векторном языке»: через заданную точку Мо(xo,yo,zo) можно провести единственную прямую L, параллельную заданному вектору SL=[sx;sy;sz]t
LR3:L SL M0L
Назовем этот вектор SL=[sx;sy;sz]t «направляющим вектором» прямой L и выведем уравнение прямой, которое связывает координаты любой точки прямой M(x,y,z)L.
.
![]()
Например,
Замечания.
1) Уравнения (1),(2)
называются "параметрическими"
потому, что каждая точка прямой
определяется значением параметра -

2) L1||L2 <=>S1||S2<=> S1=λS2. -условие параллельности прямых.
L1L2 <=> S1S2<=> (S1,S2)=0 -условие перпендикулярности прямых.
3)Угол между прямыми
угол между их направляющими векторами
![]()
!!!»Заповедь»:»Решение задач аналитической геометрии следует начинать с определения параметров прямой L(M0;SL).
-----------------------------------------------------------------
Примеры.
[1]. Прямая через
две заданные точки :
![]()

[2]. Точка пересечения
двух прямых
![]()
определяется,
очевидно, значениями двух параметров
λP(L1),
μP(L2),
которые должны удовлетворять системе
3 уравнений:

Так как
 L1,L2
не параллельны
L1,L2-
скрещивающиеся прямые.
L1,L2
не параллельны
L1,L2-
скрещивающиеся прямые.
§15. Плоскость в R3.
Из аксиом геометрии следует, что через любую заданную точку Мо(xo,yo,zo) проходит единственная плоскость α, перпендикулярная заданному вектору nα=[nx;ny;nz]t, называемому нормальным вектором плоскости.
Выведем уравнение плоскости α(M0(x0,y0,z0); nα).

M0M=r-r0 nα <=> (r-r0 ,nα)=0<=>

Следствия.
(1). Всякое линейное относительно координат уравнение задает в R3 плоскость, при этом (а)коэффициенты при координатах, находящихся в одной части уравнения, являются координатами направляющего вектора плоскости, а три координаты точки плоскости определяются одним уравнением.
Например,
-
уравнение x=y в R3 определяет плоскость α(M0(1,1,0);nα=[1,-1,0]tOZ)OZ;
-
z=2 n=[0;0;1]tOZ α||XOY;
(2) Условие параллельности плоскостей : α||β <=> nα||nβ <=> nα=λnβ.
(3) Условие перпендикулярности плоскостей : αβ <=> nαnβ <=> (nα,nβ)=0.
(4) Угол между плоскостями равен углу между нормальными векторами этих плоскостей (,)=(nα,nβ) (cos(α,β)=cos(nα,nβ)=( nα,nβ)/||nα||/||nβ||.
(5) Угол между прямой
L
и плоскостью
α и
угол между соответствующими векторами
SL,nα
связаны
соотношением (L,α)+(SL,nα)=π/2,
поэтому sin(L,α)=
sin[π/2-(nα,nβ)]=cos(SL,nα)=![]() .
.
=====================================================================
Примеры. α(A(1,1,0);nα=[1,2,3]t); (B(1,1,0);n=[1,1,1]t);
L(F(1;1;1); SL=[3,2,1]t; C(1;0;1)
1)(,)=(
nα,n)=
2)(L, )= π/2-(SL,nα)(L, )=arccos(SL,nα)=arcos(10/14)0.775рад44.40
3)C(плоскость через заданную точку параллельно заданной плоскости)
(C;n=n): 1(x-1)+2(y-0)+3(z-1)=0x+2y+3z=4
4)CL (плоскость через заданную точку перпендикулярно заданной прямой)
(C;n=SL): 3(x-1)+2y+1(z-1) 3x+2y+z=4
§16. Задачи на прямую и плоскость в R3.
Пусть заданы своими координатами точки
A(1;1;2); B(1;2;1);C(2;1;1);D(1;2;3)
[1] Плоскость через три заданные точки, не лежащие на одной прямой.
A,B,C
ABnAC
n=
AB x AC=
(A; n=[1;1;1]t): 1(X-1)+1(Y-1)+1(Z-2)=0 x+y+Z=4
[2] Прямая как линия пересечения плоскостей L=(B;n=[1;-1;1]t).
L(ML-?;SL-?)
ML,:

SL:
nSLn
SL=
nxn=
[
n=[1;1;1]t

Выберем любую точку плоскости A и вычислим вектор
АD=[0;1;1]t.
Очевидно, что
модуль его
проекции
на вектор нормали плоскости равен
искомому расстоянию
![]()
![]()
[4]. Проекция точки D на плоскость α.
а) Проведем через точку D прямую L, перпендикулярную плоскости.

б) Найдем точку пересечения прямой L и плоскости α:

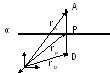
[5]. Точка D1, симметричная заданной точке d относительно заданной плоскости α.
а)
Найдем точку
![]()
б) Запишем равенство для направленных отрезков:
rD1=rA+2AP=rA+2(rP
-rA)=2rP-rA=[-1;1;2]t
![]()
[6]. Расстояние от заданной точки A(1,1,2) до заданной прямой L(ML(0,2,2); SL=[2,0,-2]t).
а) Проведем через точку А плоскость, перпендикулярную прямой L.
![]()
б) Найдем точку P
пересечения плоскости α и прямой L
3
:
 в)Найдем норму |AP|=||[-1/2;1;-1]t||=1.5
в)Найдем норму |AP|=||[-1/2;1;-1]t||=1.5
===========================================================================
ТР по теме "Аналитическая геометрия".
Задание. По заданным своими координатами точкам A1,A2,A3,A4
|
ВАР. |
A1 |
A2 |
A3 |
A$ |
|
|
x1,y1,z1 |
x2,y2,z2 |
x3,y3,z3 |
x4,y4,z4 |
1. Записать уравнения плоскостей a(A1,A2,A3) и b(A,A3,A4) .
2. Найти косинус угла и угол в радианной мере между этими плоскостями.
3. Записать уравнение прямой L(A1,A4).
4. Найти синус угла и угол между прямой L и плоскостью a.
5. Найти расстояние от точки A4 до плоскости a.
6. Найти точку A5, симметричную точке A4 относительно плоскости a.
================================================================