

5. Розрахунок і моделювання системи автоматичного регулювання
В даному розділі бакалаврській кваліфікаційній роботі досліджується САР температури в реакторі. Номінальне значення температури 175 ºС. Регулюючою дією в даній САР є витрата пари, що подається в реактор.
Етилен, стиснутий до робочого тиску поступає в реактор з перемішуючим пристроєм. Полімеризація проводиться під тиском 110-150 МПа при температурі 170-200 °С. Для пришвидшення процесу в верхній трубопровід етилену дозується ініціатор. В результаті реакції частина етилену полімеризується в поліетилен. Ступінь полімеризації коливається в межах 10-12%.
Показником ефективності процесу полімеризації є ступінь полімеризації, її треба підтримувати максимально високою. Ступінь полімеризації визначається чистотою етилену, температурою і тиском полімеризації, співвідношенням витрати етилену та ініціалізатора. До чистоти етилену пред’являються дуже високі вимоги, тому що наявність домішок суттєво змінює хід процесу.
5.1. Вихідні дані
Зміна витрати пари здійснюється переміщення регулюючого органу в паропроводі. Основним збуренням для досліджуваного об’єкту є витрата етилена.
Для розрахунку САР була отримана експериментальна крива розгону стрибкоподібною зміною положення в паропроводі на 15%
Час, сек |
Температура, ºС |
0 175.08
9 175.07
51 176.22
66 177.43
84 178.80
102 180.23
117 181.63
144 183.41
150 184.00
177 185.50
201 186.39
261 187.78
420 188.85
Функція передачі
каналом збурюючої дії
![]()
Вимоги до якості процесу регулювання
Максимальне динамічне відхилення A1= 5 ºС.
Допустима похибка регулювання Δ=±0.5 ºС
Час регулювання tp=300 сек.
Ступінь коливальності m=0.32
Крива розгону,отримана при стрибкоподібній зміні переміщення РО на 15%.
Програма в середовищі Matlab для побудови експериментальної кривої розгону
Будую експериментальну криву розгону, отриману при стрибкоподібній зміні регулюючої дії .
clear;clc
ye=[175.08 175.07 176.23 177.44 178.81 180.23 181.64 183.42 184.01 185.50 186.39 187.78 188.86];
t0=[0 9 51 66 84 102 117 144 150 177 201 261 420];
yn=188.8552;
plot(t0, ye);grid; xlabel('t, с'); ylabel('P,Pa');
Результатом програми буде:
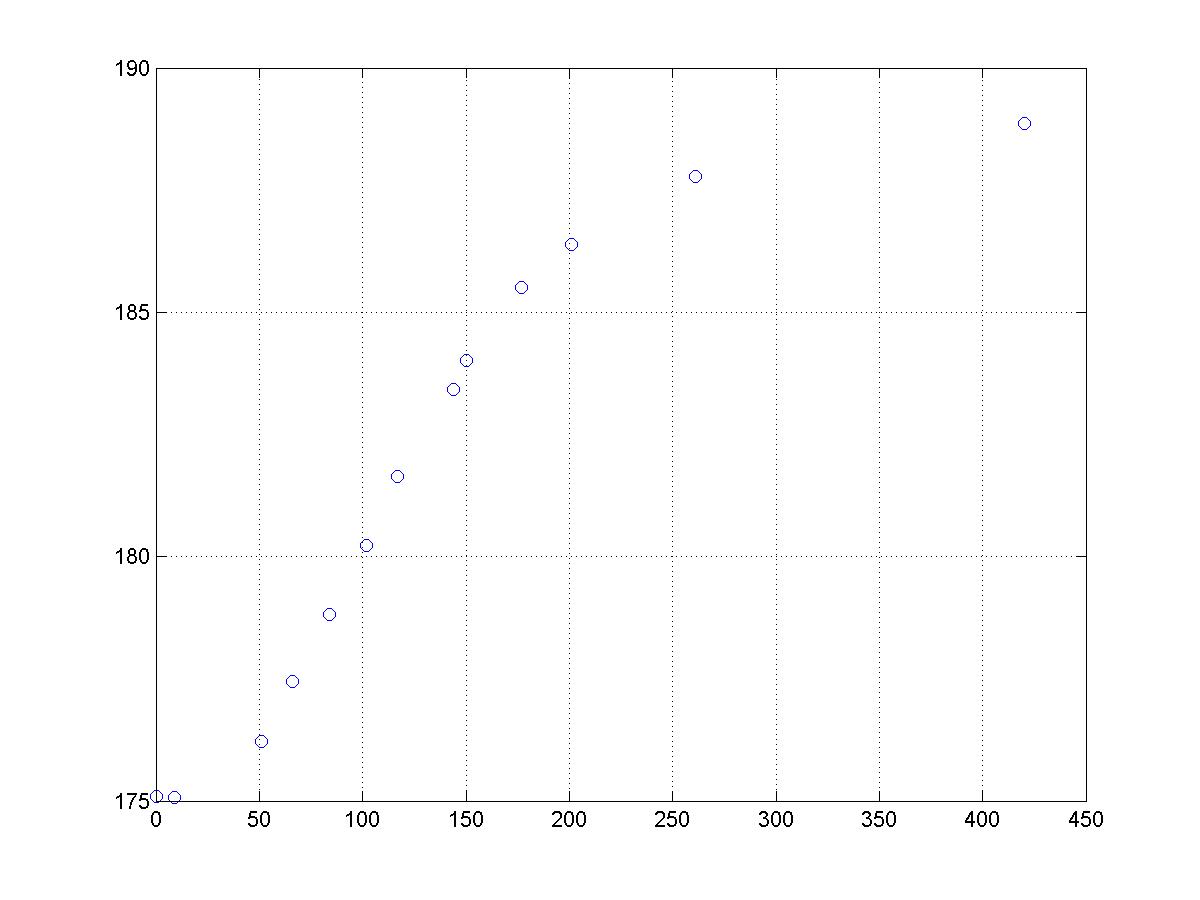
Рис.1 Крива розгону, отримана при стрибкоподібній зміні регулюючої
дії на 15%.
5.2. Побудова математичної моделі ор
Щоб розрахувати систему автоматичного регулювання даного контуру визначаємо математичну модель об'єкту. Математичну модель об'єкта регулювання для розрахунків оптимальних параметрів настройки регулятора знаходимо у вигляді функції передачі.
Побудуємо математичну модель за наявністю експериментальної знятої на об'єкті кривої розгону, яка відображає зміну температури в реакторі від зміни положення регулюючого органа подачі пари на 15 %.
Щоб розрахувати систему автоматичного регулювання даного контуру визначаємо математичну модель об'єкту. Крива розгону об'єкту регулювання температури в реакторі представлена на рис.1.
Для
зручності розрахунків експериментальну
криву розгону об’єкта регулювання
![]() нормуємо діленням її значень на
максимальну зміну вихідної величини
нормуємо діленням її значень на
максимальну зміну вихідної величини
![]() .
.
де
![]() значення вихідної величини після
завершення перехідного процесу;
значення вихідної величини після
завершення перехідного процесу;
![]() -
початкове (номінальне) значення
регульованої величини.
-
початкове (номінальне) значення
регульованої величини.
Програма в середовищі Matlab для побудови нормованої експериментальної кривої розгону
У
результаті отримую нормовану перехідну
функцію
![]()
clear;clc
ye=[175.08 175.07 176.23 177.44 178.81 180.23 181.64 183.42 184.01 185.50 186.39 187.78 188.86];
t0=[0 9 51 66 84 102 117 144 150 177 201 261 420];
yn=188.8552;
dy = ye(length(ye))-ye(1);
He=(ye-yn)./dy;
plot(t0,He);grid;
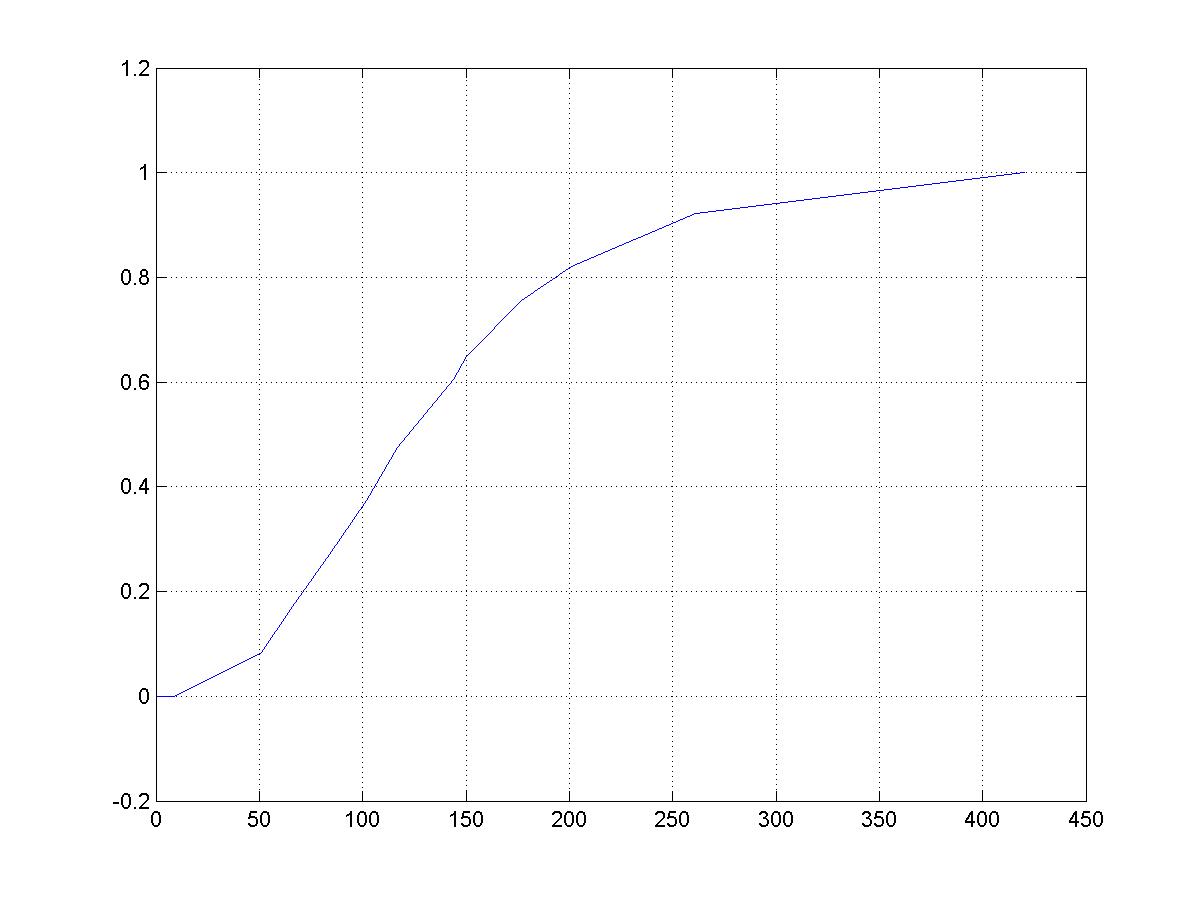
Рис.2 Нормована експериментальна перехідна функція.
Відзначимо, що розмірний коефіцієнт передачі об’єкта регулювання з експериментальної кривої розгону визначається за формулою.
![]() ,
,
![]()
![]() ,
,
![]()
де
![]() значення
стрибкоподібної зміни вхідної величини,
яка викликала зміну вихідної величини.
значення
стрибкоподібної зміни вхідної величини,
яка викликала зміну вихідної величини.
Виходячи з характеру експериментальної кривої вибираємо передбачувану структуру моделі об’єкта і відповідну до неї функцію передачі в загальному вигляді послідовного з’єднання трьох аперіодичних ланок і ланки запізнення:
![]()
де Т – стала часу;
k – коефіцієнт передачі.
τ- час запізнення