

14.12. Усилие захватывания
На каждый рабочий элемент захватного устройства в общем случае действует две полные нормальные силы и силы трения (рис. 14.24), которые направлены противоположно усилиям, действующим на объект.
П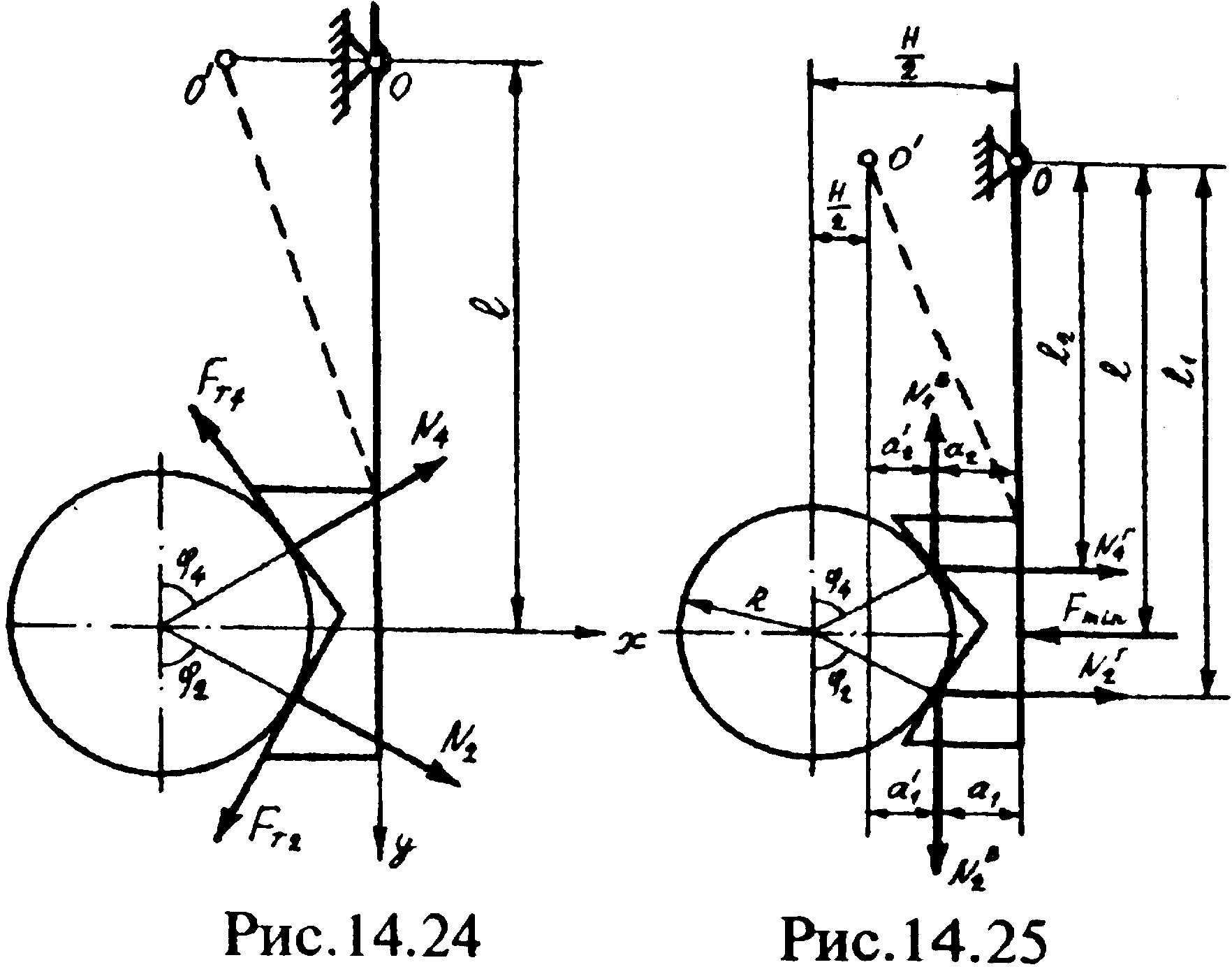 роектируя
эти силы на направление перпендикулярное
к условной прямолинейной поверхности
рабочего элемента (на ось х) и параллельное
этой поверхности (на ось у), получим
четыре силы, действующие на рабочий
элемент захватного устройства
(рис.14.25):
роектируя
эти силы на направление перпендикулярное
к условной прямолинейной поверхности
рабочего элемента (на ось х) и параллельное
этой поверхности (на ось у), получим
четыре силы, действующие на рабочий
элемент захватного устройства
(рис.14.25):

Эти силы вызывают поворот рабочего элемента относительно точки О его вращения. Для уравновешивания рабочего элемента приложим в его середине усилие захватывания Fьшт (рис.14.25) перпендикулярно условной прямолинейной поверхности на расстояние l от точки вращения. Запишем уравнение моментов относительно точки О:
![]()
откуда найдем силу захватывания, которую необходимо приложить для уравновешивания рабочего элемента:
![]() (14.35)
(14.35)
где l1 и l2 плечо действия силы N2Г и N4Г соответственно:
![]() знак
плюс ставят, если момент от вертикальной
силы раскрывает рабочие элементы, знак
минус
- если
закрывает; a1
и а2
- плечо
действия силы N2В
и
N4В
соответственно:
знак
плюс ставят, если момент от вертикальной
силы раскрывает рабочие элементы, знак
минус
- если
закрывает; a1
и а2
- плечо
действия силы N2В
и
N4В
соответственно:

где R - радиус объекта; Н - расстояние между осями вращения рабочих элементов.
Следовательно, в общем случае при различном расположении оси вращения О или О' рабочего элемента можно записать:

(14.36)
Сила Fmin является минимально необходимой, которая требуется для удержания объекта. Для надежного закрепления объекта в рабочих элементах необходимо приложить усилие захватывания F больше минимальногоFmin, т.е. F =n Fmin , где n - коэффициент запаса равный 1,5...2,0.
Действие нормальных сил Ni и сил трения FTi на рабочий элемент можно условно заменить одной эквивалентной силой Nmin , приложенной в его центре перпендикулярно условной поверхности и создающей тот же момент относительно точки О вращения, что и приложенные силы, и по величине равной Nmin = Fmin (рис. 14.26) или с учетом коэффициента запаса N=F.
14.13. Усилие привода
Усилие
привода (сила FВХ
или момент ТВХ)
охвата определяют из условия равенства
элементарных работ, совершаемых приводом
(входным звеном передаточного механизма
охвата) и рабочими элементами, т.е.![]() .
Откуда усилие привода
.
Откуда усилие привода 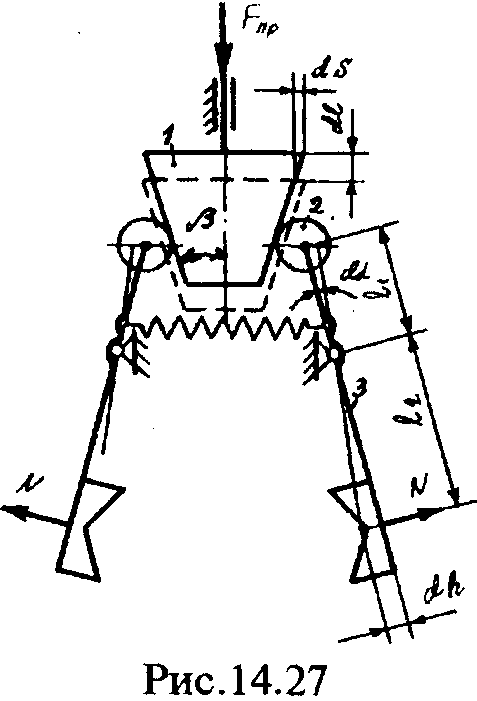 равно:
равно:
![]() (14.37)
(14.37)
где АД - работа, совершаемая приводом (работа движущих сил); АС - работа, совершаемая рабочими элементами (работа сил сопротивления). Остальные параметры соответствуют параметрам в формуле (14.1.).
При преобразовании поступательного движения привода в поступательное движение рабочих элементов усилие привода определяют по формуле:
![]()
Определим усилие привода клинового передаточного механизма схвата (рис. 14.27) при известных эквивалентных силах N, действующих на рабочие элементы.
Находим передаточное отношение передаточного механизма. Для этого дадим клину 1 элементарное малое перемещение dl. При этом ролик 2 переместится на малую величину dS, звено 3 - на элементарный угол dα, а рабочий элемент - на величину dh.
Элементарное перемещение клина запишем в виде:
![]()
где l1 - длина верхней части звена 2; β- угол конуса клина; ρ- приведенный угол трения, ρ= 1010' - при осях на подшипниках качения и ρ = 3° - при осях на подшипниках скольжения.
Элементарное перемещение рабочего элемента равно:
![]()
Находим передаточное отношение:
![]()
Усилие привода определяем по формуле 14.37
![]()
где η =0,9...0,95 - КПД передаточного механизма.
В табл. 14.2 представлены схемы передаточных механизмов схватов и проведены расчетные формулы для определения передаточных отношений и усилий приводов.
Часто
возникает необходимость при известном
усилии привода определить усилие
захватывания. Оно может быть определено
по формуле
14.37 как
обратное действие нахождению силы
привода. По таблице
14.2 для
приведенных схем передаточных механизмов
при известном усилие привода можно
найти усилие захватывания
![]()