

14.6. Механические захватные устройства
Механическими называют захватные устройства, в которых удерживание объекта осуществляется под действием усилий, возникающих в точках (зонах) контакта объекта с рабочими элементами за счет работы приводов или собственного веса объекта. Механические захватные устройства можно разделить
на схваты и поддерживающие захватные устройства. Схват - механическое захватное устройство, удерживающее объект посредством зажима рабочими элементами при их перемещении. Поддерживающими называют механические захватные устройства не имеющие подвижных звеньев и представляющие собой опоры, на которых объект удерживается под действием силы тяжести (ковши для захватывания, транспортировки и разливки жидкого металла, крюки, штыри, призматические опорные элементы, лопатки и т.д.).
Базирование объекта в охвате обусловлено, главным образом, конструктивными особенностями рабочих элементов. При этом число координат, по которым положение объекта в ЗУ строго не определено (относительно системы координат ЗУ), может колебаться от 0 до 6.
Б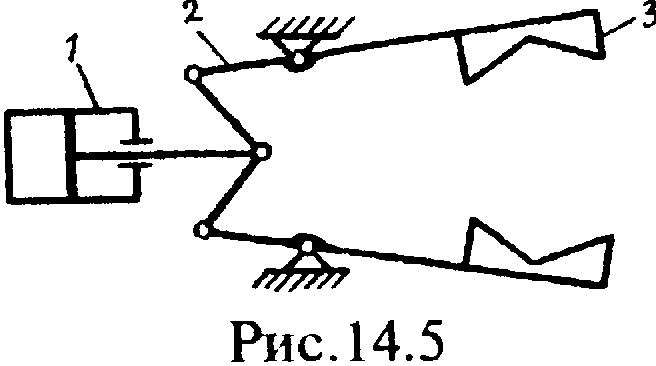 ольшинство
современных промышленных роботов
оснащено механическими захватными
устройствами
- схватами.
Схват (рис.
14.5) состоит
из следующих основных частей: двигатель
1, передаточный
механизм
2 и рабочие
ольшинство
современных промышленных роботов
оснащено механическими захватными
устройствами
- схватами.
Схват (рис.
14.5) состоит
из следующих основных частей: двигатель
1, передаточный
механизм
2 и рабочие
элементы 3.
14.7. Двигатели схватов
По функциональным возможностям создания перемещений рабочих элементов двигатели схватов можно разделить на три группы: с неограниченным перемещением выходного звена (например, электродвигатели), с ограниченным перемещением выходного звена (например, пневмоцилиндры и неполноповоротные пневмодвигатели), с малым перемещением выходного звена (например, мембранные двигатели). Двигатели с неограниченным перемещением выходного звена целесообразно применять в схватах, предназначенных для захватывания объектов, у которых расстояние между захватываемыми поверхностями может изменяться в широких пределах. Двигатели с ограниченным перемещением выходного звена применяют, когда расстояние между захватываемыми поверхностями объекта изменяется в небольших пределах. Двигатели с малыми перемещениями применяют в узкодиапазонных схватах, предназначенных для захватывания объектов с одними и теми же размерами.
П о
типу энергоносителя в схватах применяют
пневматические, гидравлические и
электрические двигатели.
о
типу энергоносителя в схватах применяют
пневматические, гидравлические и
электрические двигатели.
В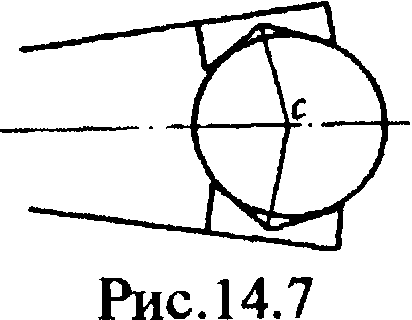 качестве двигателей, приводящих в
движение рабочие элементы и создающие
усилия захватывания, могут быть
использованы электромагниты (рис.
14.6). Сжатие
схвата происходит при подаче напряжения
на обмотку
1 электромагнита
2, раскрытие
-
под действием пружины
3.
качестве двигателей, приводящих в
движение рабочие элементы и создающие
усилия захватывания, могут быть
использованы электромагниты (рис.
14.6). Сжатие
схвата происходит при подаче напряжения
на обмотку
1 электромагнита
2, раскрытие
-
под действием пружины
3.
14.8. Передаточные механизмы
Передаточные механизмы схватов предназначены для преобразования и передачи движения и усилия двигателя рабочим элементом. В таблице 14.1 изображены различные структурные схемы передаточных механизмов схватов.
Тот или иной вид движения рабочих элементов определяется структурной схемой передаточного механизма. Вершина К рабочего элемента (табл. 14.1), представляющая собой точку пересечения касательных к поверхности объекта в местах ее контакта с рабочим элементом (если рабочий элемент касается объекта двумя плоскостями), или точка соприкосновения рабочего элемента с объектом (если он имеет только одну рабочую поверхность), может совершать вращательное, поступательное или прямолинейное движения. При этом центр С окружности, вписанной в многоугольник, образованный плоскостями рабочих элементов, называемый центром охвата (рис. 14.7), при вращательном и поступательном движениях изменяет свое положение, при прямолинейном - остается неизменным. передаточные механизмы схватов у которых рабочие элементы совершают вращательное движение являются наиболее простыми в конструктивном исполнении. Передаточные механизмы с поступательным движением рабочих элементов более сложны.
Существенным недостатком обоих указанных типов передаточных механизмов является зависимость положения центра охвата от угла поворота рабочего элемента. Схваты с такими передаточными механизмами могут быть использованы только для захвата объектов, размеры которых отличаются незначительно. Для работы схватов в широком диапазоне размеров захватываемых объектов необходимо применять передаточные механизмы с прямолинейным движением рабочих элементов.
Для передаточных механизмов схватов вводят понятие передаточного отношения:
![]() (14.1)
(14.1)
где dLВХ - элементарное перемещение (линейное dl или угловое d входного звена передаточного механизма; dLВЫХ - элементарное перемещение (линейное dh или угловое d) выходного звена (рабочего элемента);
ВХ- скорость (линейная VВХ или угловая WВХ) входного звена;
ВЫХ - скорость (линейная VВЫХ или угловая WВЫХ ) выходного звена (рабочего элемента);
К - число рабочих элементов;
МВЫХ - эквивалентный силовой фактор (сила N или момент Т) на выходном звене (рабочем элементе);
МВХ - силовой фактор (сила FПР или момент ТПР) на входном звене;
η- коэффициент полезного действия (КПД) передаточного механизма охвата равный 0,85...0,95.
Наиболее часто в передаточных механизмах схватов используют преобразование поступательного движения входного
звена в поступательное движение рабочих элементов. В этом случае передаточное отношение определяют по формуле:
![]()
Рабочие элементы
Для захватывания и удержания объекта выходные звенья передаточных механизмов схватов снабжают рабочими элементами, рабочая поверхность которых представляет собой плоскость, призму, боковую поверхность цилиндра или их комбинацию. Рабочие элементы в свою очередь снабжают накладками (губками) 1 (рис. 14.14, д). Их роль во взаимодействии рабочих элементов с объектом и в обеспечении высокого уровня эксплуатационных характеристик велика. Выбором материала накладок с повышенным коэффициентом трения может быть существенно повышена несущая способность схвата без всяких изменений остальных частей. Накладками из теплоизолирующих материалов может быть снижен нагрев схвата при работе с горячими заготовками. Влияние износа в зонах контакта на точность захвата объекта может быть значительно уменьшено, если накладки являются сменными.
Усилия в местах контакта объекта с рабочими элементами
У силия,
возникающие в местах контакта объекта
с рабочими элементами, зависят от способа
закрепления объекта в захватном
устройстве и направления действия
вектора равнодействующей силы, приложенной
к объекту.
силия,
возникающие в местах контакта объекта
с рабочими элементами, зависят от способа
закрепления объекта в захватном
устройстве и направления действия
вектора равнодействующей силы, приложенной
к объекту.
Рассмотрим
общий случай закрепления объекта в
захватном устройстве (рис.14.15). Считаем,
что центр масс объекта совпадает с
центром схвата или имеет небольшое
смещение. При движении исполнительного
устройства с ускорением объект также
будет двигаться ускоренно. Вектор
равнодействующей силы
![]() от силы веса объекта и максимальной
инерционной силы равен:
от силы веса объекта и максимальной
инерционной силы равен:
![]() (14.13)
(14.13)
где
m
- масса
объекта;
![]() -
вектор ускорения свободного падения;
-
вектор ускорения свободного падения;
![]() - вектор
максимального ускорения объекта:
- вектор
максимального ускорения объекта:
 (14.14)
(14.14)
![]() -
вектор ускорения объекта от ускорения
i-го звена
исполнительного устройства;
-
вектор ускорения объекта от ускорения
i-го звена
исполнительного устройства;
![]() - вектор
кориоллисова ускорения объекта; n -
число подвижных звеньев исполнительного
устройства.
- вектор
кориоллисова ускорения объекта; n -
число подвижных звеньев исполнительного
устройства.
Приближенное значение вектора Q можно определить в
виде:
 , (14.15)
, (14.15)
где К=1.1...1.3.
Вектор
![]() можно разложить на составляющие: по
направлению оси захватного устройства
можно разложить на составляющие: по
направлению оси захватного устройства
![]() -осевая
сила, перпендикулярно оси захватного
устройства
-осевая
сила, перпендикулярно оси захватного
устройства
![]() -
нормальная сила и перпендикулярно
плоскости захватывания (вдоль оси
объекта)
-
нормальная сила и перпендикулярно
плоскости захватывания (вдоль оси
объекта)
![]() -бинормальная
сила. В результате получили систему
трех взаимно перпендикулярных сил,
действующих на объект. Таким образом,
рассматриваемую схему удержания объекта
можно пред ставить в виде суммы трех
элементарных схем. При этом в точках
контакта объекта с рабочими элементами
захватного устройства возникнут
элементарные нормальные
-бинормальная
сила. В результате получили систему
трех взаимно перпендикулярных сил,
действующих на объект. Таким образом,
рассматриваемую схему удержания объекта
можно пред ставить в виде суммы трех
элементарных схем. При этом в точках
контакта объекта с рабочими элементами
захватного устройства возникнут
элементарные нормальные
![]() и касательные (силы трения)
и касательные (силы трения)
![]() силы, где i=l,2,3,4
- номер точки контакта объекта с
рабочими
элементами; j
- номер элементарного нормального и
касательного усилий, возникающих в
i-й точке
контакта. Для определения их значений
необходимо рассмотреть равновесие
объекта в каждой элементарной схеме.
силы, где i=l,2,3,4
- номер точки контакта объекта с
рабочими
элементами; j
- номер элементарного нормального и
касательного усилий, возникающих в
i-й точке
контакта. Для определения их значений
необходимо рассмотреть равновесие
объекта в каждой элементарной схеме.
Р ассмотрим
элементарную схему удержания объекта
(рис.
14.16, а). В
точках
1 и
2 контакта
объекта с рабочими элементами захватного
устройства возникают нормальные
ассмотрим
элементарную схему удержания объекта
(рис.
14.16, а). В
точках
1 и
2 контакта
объекта с рабочими элементами захватного
устройства возникают нормальные
![]() и
касательные
и
касательные
![]() силы (рис.
14.17). Для
их определения рассмотрим равновесие
объекта. Составим уравнения проекций
всех сил на оси х и у:
силы (рис.
14.17). Для
их определения рассмотрим равновесие
объекта. Составим уравнения проекций
всех сил на оси х и у:
![]()
К асательная
сила (сила трения) FT
= N
• f,
где f
- коэффициент
трения скольжения между объектом и
рабочими элементами. Для незакаленных
сталей без насечки (стали марок
45, 50)
f=0,12...0,15,
для закаленных сталей с острой насечкой
(стали марок 65Г, У8А, У10A)f=0.3...0.35.
асательная
сила (сила трения) FT
= N
• f,
где f
- коэффициент
трения скольжения между объектом и
рабочими элементами. Для незакаленных
сталей без насечки (стали марок
45, 50)
f=0,12...0,15,
для закаленных сталей с острой насечкой
(стали марок 65Г, У8А, У10A)f=0.3...0.35.
После подстановки выражения для силы FТ в систему уравнений и ее решения, найдем нормальные силы и силы трения, возникающие в точках контакта объекта с рабочими элементами:


Если 1 = 2 = , то нормальные силы будут равны:
![]() (14.19)
(14.19)
Если только φ1= 90° (рис. 14.18), то
При 1 = 2 = 90° (рис. 14.19), получим:
![]() . (14.22)
. (14.22)
Для
элементарной схемы (рис.14.16,6)
удержания объекта в точках
1 и 3
контакта объекта с рабочими элементами
возникают нормальные
![]() и
касательные
и
касательные
![]() силы
(рис.
14.20).
силы
(рис.
14.20).
Рассматривая равновесие объекта, найдем нормальны силы и силы трения:
![]()

При
1
= 3
= 90°:
![]() ,
,
и полная нормальная сила будет равна:
![]() (14.25)
(14.25)
Для
элементарной схемы (рис.
14.16, в)
удержания объекта в точках
1,2, 3 и
4 контакта
объекта с рабочими элементами возникнут
нормальные
![]() и
касательные
и
касательные
![]() силы.
силы.
Для их определения рассмотрим равновесие половинок объекта. Для левой половинки объекта (рис.14.21):

После решения системы уравнений найдем значения нормальных сил:
Рассматривая равновесие правой половинки объекта аналогично найдем:
![]()
При 1 = 2 = 3 = 4 = будем иметь:
![]()
 (14.30)
(14.30)
Из полученных формул при равенстве всех углов видно, что какое бы значение ни приобретали углы φ величины нормальных сил остаются неизменными.
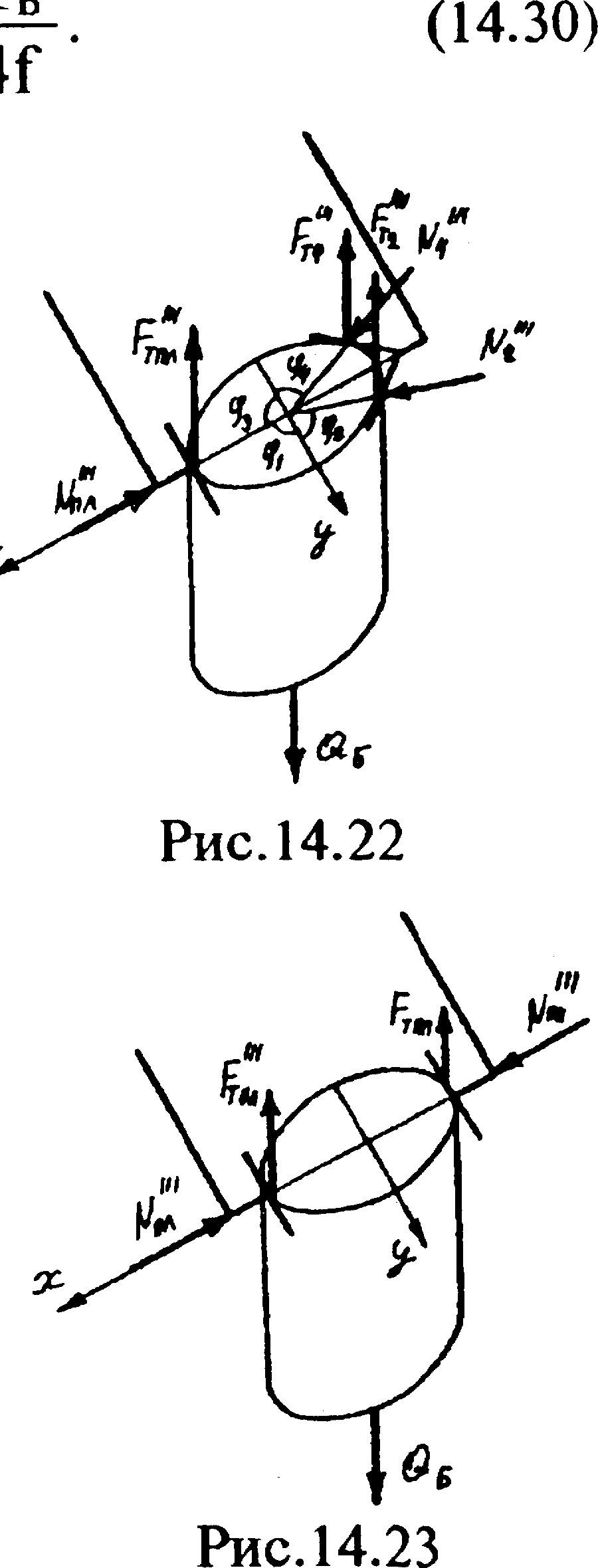
Если φ1 = φ3 = 90° а φ2 ≠ 900 и φ4 ≠ 90° (рис. 14.22), то
полная нормальная сила, действующая слева на объект равна:
![]() (14.31)
(14.31)
Если 1 = 2 = 3 = 4 = 90° (рис. 14.23), то полные нормальные силы, действующие слева и справа на объект равны
Значения полной нормальной силы и силы трения в каждой точке контакта объекта с рабочими элементами захватного устройства находят по формулам:
 (14.34)
(14.34)
где i=l, 2, 3, - номер точки контакта объекта с рабочими элементами; j - номер элементарной нормальной силы и силы трения в i-и точке контакта; n =III - максимальное число элементарных нормальных усилий и сил трения в i-й точке контакта.
Максимальное значение нормальной силы будет в той точке, в которой действует наибольшее число элементарных нормальных сил.
В общем случае опасную точку контакта можно определить в зависимости от направления действия вектора внешней
силы . Если вектор усилия проходит через квадрант, содержащий i-ю точку контакта, то она и будет опасной точкой. В рассматриваемом случае вектор усилия проходит через квадрант, содержащий точку контакта 1, поэтому она и является опасной.