

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
Государственное образовательное учреждение высшего профессионального образования
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПРИКЛАДНОЙ БИОТЕХНОЛОГИИ (МГУПБ)
Кафедра технологического оборудования и процессов отрасли
ОСНОВЫ МЕХАТРОНИКИ
А.Я. Красинский, Д.Р. Каюмова, А.А. Халиков
ОДНОРОДНЫЕ ПРЕОБРАЗОВАНИЯ
Методические указания к самостоятельной работе
для студентов специальностей
220401 – Мехатроника
260601 – Машины и аппараты пищевых производств
260602 – Пищевая инженерия малых предприятий
и направления подготовки уровня бакалавриата 150400 – Технологические машины и оборудование
Москва 2010
Составители: А.Я. Красинский, д.ф.-м.н., проф.
А.А. Халиков, асп.
Д.Р. Каюмова, асп.
Методические указания составлены в соответствии с рабочей программой по курсу «Основы мехатроники». Цель методических указаний – ознакомление студентов с однородными преобразованиями и приобретение навыков составления матриц однородных преобразований.
Предназначены для студентов специальностей 220401 – Мехатроника, 260601 – Машины и аппараты пищевых производств, 260602 – Пищевая инженерия малых предприятий и направления подготовки уровня бакалавриата 150400 – Технологические машины и оборудование.
Утверждены УМС МГУПБ.
© МГУПБ, 2011
Введение
Одним из важных классов роботов является класс манипуляционных роботов. Манипуляционные роботы в ходе работы постоянно выполняют операции позиционирования (перемещение) и ориентирования (вращение) кисти робота (схвата). Кинематика таких движений может быть описана перемещением и вращением систем координат, связанных с частями конструкции манипуляционного робота.
С точки зрения кинематики манипуляционный робот представляет собой незамкнутую цепь звеньев, соединенных последовательно поступательными или вращательными сочленениями. Один конец манипулятора робота обычно закреплен, а второй соединен с рабочим орудием. Цель управления таким роботом – поместить схват в определенную точку с определенной ориентацией в заданное время.
Положение и ориентация схвата манипуляционного робота могут быть описаны через положение и ориентацию системы координат, связанной со схватом, по отношению к инерциальной базовой системе координат.
Совокупность положения и ориентации схвата в пространстве (кинематическое положение) математически может быть описана при помощи однородных преобразований размерности 4х4. Эти однородные преобразования могут использоваться при решении прямой и обратной кинематических задач. Кинематическое положение схвата обычно выражается матрицей размера 4х4, в которую входит вектор р положения начала системы координат схвата, а также матрица вращения R размером 3х3.
Система координат А представляется однородным преобразованием размера 4х4, которое описывает положение ее начала координат и поворот по отношению к базовой инерциальной системе координат. Однородное преобразование определяется как матрица H размера 4х4, которая в общем случае описывает перенос, вращение, растяжение (масштабирование) и перспективную проекцию векторов, точек, тел и других видов объектов. В общем случае она состоит из матрицы вращения R 3х3, матрицы переноса p 3х1, вектора перспективной проекции b 1х3 и матрицы масштабирования (растяжения) w 1х1:
![]() . (1)
. (1)
Манипулятор состоит из набора звеньев, соединенных при помощи сочленений. Однородные преобразования по отношению к локальным системам координат сочленений называются А-матрицами (т.е. преобразования Денавита-Хартенберга). Пусть А1 описывает положение и ориентацию первого звена, А2 – второго и т.д. в системе координат основания. Тогда положение и ориентация n-го звена в системе координат основания будут:
![]() (2)
(2)
Данная формула справедлива и в том случае, если Ai – матрица, описывающая ориентацию и положение i-го звена в системе координат (i – 1)-го звена, а не в системе координат основания.
Ход работы
Ниже будет рассмотрен пример нахождения матрицы сложного однородного преобразования, описывающего последовательность вращений и переносов.
Для нахождения матрицы сложного однородного преобразования необходимо найти матрицы простых однородных преобразований и последовательно перемножить их.
Нахождение матрицы простых однородных преобразований размера 4х4 сводится к вычислению косинусов углов между осями (матрица вращения размера 3х3) и заполнению матрицы переноса (размера 3х1), входящую в состав матрицы преобразования.
Пример
Найдем выражение для матрицы сложного однородного преобразования, которое получим последовательным выполнением следующих преобразований:
вращение на угол (ψ+90°) относительно оси x;
перенос на a единиц вдоль оси у;
перенос на b единиц вдоль оси z;
вращение на угол –θ относительно оси y;
вращение на угол –φ относительно оси z.
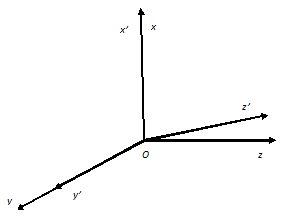
На рис. 1 показано вращение относительно оси x.
Рис. 1
С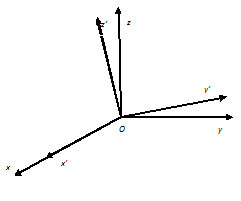 оставим
выражение для матрицы A1
вращения на угол (ψ+90°)
относительно
оси x:
оставим
выражение для матрицы A1
вращения на угол (ψ+90°)
относительно
оси x:

Первые три строки и столбца матрицы A1 представляют собой матрицу вращения – косинусы углов между осями глобальной (инерционной) и локальной (преобразованной) системы координат. Столбцы матрицы вращения соответствуют осям локальной системы координат x’, y’ и z’ соответственно, строки матрицы вращения – осям глобальной системы координат x, y и z соответственно. Поскольку масштабирование, перенос и перспективная проекция не производятся, элемент, стоящий на пересечении 4-й строки и 4-го столбца равен единице, а оставшиеся элементы 4-й строки и 4-го столбца равны нулю.
На рис. 2 показан перенос на a единиц вдоль оси у.
Составим выражение для матрицы A2 данного преобразования:
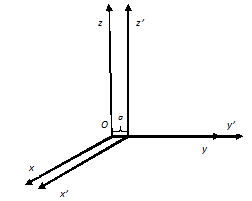
 Матрица вращения является единичной,
поскольку вращение не происходит. Второй
элемент четвертого столбца равен a,
поскольку перенос происходит вдоль оси
y.
Матрица вращения является единичной,
поскольку вращение не происходит. Второй
элемент четвертого столбца равен a,
поскольку перенос происходит вдоль оси
y.
Рис. 2
Н
 а
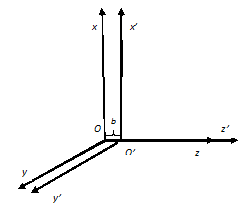
рис. 3 показан перенос на b
единиц вдоль оси z.
а
рис. 3 показан перенос на b
единиц вдоль оси z.
Составим выражение для матрицы A3 данного преобразования:
 Матрица вращения является единичной,
поскольку вращение осей локальной
системы координат относительно осей
глобальной системы не происходит. Третий
элемент четвертого столбца равен b,
поскольку перенос Рис.
3 происходит
вдоль оси z.
Матрица вращения является единичной,
поскольку вращение осей локальной
системы координат относительно осей
глобальной системы не происходит. Третий
элемент четвертого столбца равен b,
поскольку перенос Рис.
3 происходит
вдоль оси z.
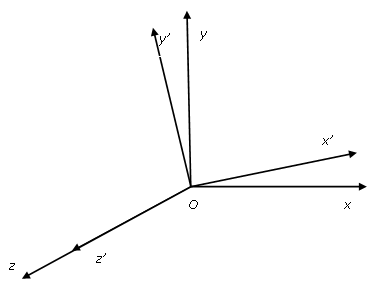
На рис. 4 показано вращение относительно оси y.
Составим выражение для матрицы A4 вращения на угол –θ относительно оси y:

Рис. 4
Н
 а
рис. 5 показано вращение относительно
оси z.
а
рис. 5 показано вращение относительно
оси z.
Составим выражение для матрицы A5 вращения на угол –φ относительно оси z:
Рис. 5
Получим выражение для матрицы сложного однородного преобразования, используя (2):

Некоторые вычисления, необходимые для решения обсуждаемой в этой работе задачи, например, умножение матриц, можно провести на компьютере, например, с использованием языка языка Python1 [3] и библиотеки SymPy2.
Для работы необходимо запустить программу IDLE3. Когда Python установлен в Windows, его можно найти в меню Пуск (Start). Набор пунктов меню может немного отличаться в зависимости от версии, но пункт IDLE запускает среду разработки с графическим интерфейсом, а пункт Python запускает сеанс работы с интерактивной командной оболочкой (консолью). Кроме того, здесь можно увидеть пункты вызова стандартного справочного руководства - Python Manuals.
Чтобы использовать функции SymPy нужно импортировать соответствующую библиотеку, выполнив команду:
>>> from sympy import * |
Определим символы l1, l2, q1, q2 , чтобы использовать их при записи элементов матрицы J:
>>> psi = Symbol('psi') >>> a = Symbol('a') >>> b = Symbol('b') >>> theta = Symbol('theta') >>> phi = Symbol('phi') |
Введем матрицы Ai в компьютер:
>>> A1=Matrix([[1,0,0,0],[0,-sin(psi),-cos(psi), 0],[0,cos(psi),-sin(psi),0],[0,0,0,1]]) >>> A2=Matrix([[1,0,0,0],[0,1,0,a],[0,0,1,0],[0,0,0,1]]) >>> A3=Matrix([[1,0,0,0],[0,1,0,0],[0,0,1,b],[0,0,0,1]]) >>> A4=Matrix([[cos(theta),0,-sin(theta),0],[0,1,0,0],[sin(theta),0,cos(theta),0],[0,0,0,1]]) >>> A5=Matrix([[cos(phi),sin(phi),0,0],[-sin(phi),cos(phi),0,0],[0,0,1,0],[0,0,0,1]]) |
Выведем произведение матриц Ai – матрицу сложного однородного преобразования:
>>> print A1*A2*A3*A4*A5 |