

2.1.5 Модуль перекладчика

Рисунок 2.4-Модуль перекладчика
Модуль перекладчика (Рисунок 2.4) является пневматическим устройством-манипулятором. Заготовки поднимаются присоской и перемещаются с помощью поворотного двигателя. Угол поворота регулируется в пределах от 0° до 180° посредством механических упоров. Определение конечного положения осуществляется с помощью электромеханических концевых выключателей (микропереключателей).
Примечание:
Конечное положение поворотного привода должно быть отрегулировано в зависимости от выбора следующей станции.
2.1.6 Ввод в эксплуатацию
Станции МПС обычно доставляются:
Полностью собранными
Отрегулированными для работы в качестве отдельной станции готовыми к эксплуатации
Проверенными
Примечание:
Если на станциях изменяется механическая установка и положение, может потребоваться установка датчиков.
Ввод в эксплуатацию обычно ограничивается визуальной проверкой правильности соединений труб/проводов и подачи рабочего напряжения.
Все элементы, трубы и провода четко обозначены так, что все соединения можно легко восстановить.
2.1.7 Рабочая станция
Для ввода МПС станции в эксплуатацию требуются:
Собранная и настроенная МПС станция
Пульт управления
ПЛК панель
Блок питания 24В постоянного тока, 4.5А
Источник сжатого воздуха давлением в 6 Бар (600 кПа), прибл. производительность 50 л/мин.
Персональный компьютер с установленным программным обеспечением для ПЛК
2.2 Механическая установка
2.2.1 Сборка профильной пластины и пульта управления
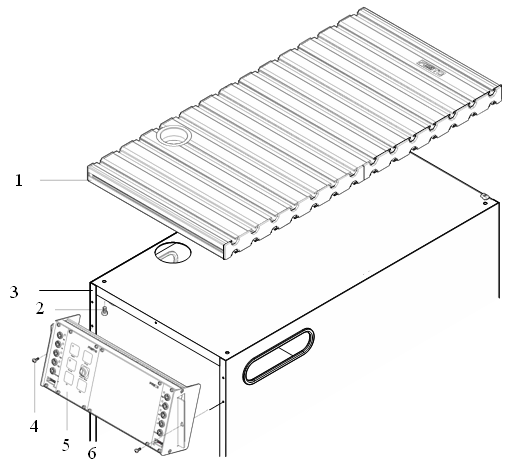
Рисунок 2.5 - профильная пластина и пульт управления
Профильная пластина
Т-образная гайка M6 x-32 (4x)
Тележка
Винт с шестигранным отверстием в головке M6x10 (4x)
Винт 3.5x9 (2x)
Пульт управления
2.3Регулировка датчиков
2.3.1 Бесконтактный датчик
Бесконтактные датчики используются для определения конечного положения цилиндра. Датчик чувствителен к постоянному магниту, установленному на поршне цилиндра.
Перед началом работы необходимо:
Собрать модуль стекового накопителя и предварительно установить бесконтактные датчики.
Подвести трубопровод к цилиндру.
Включить подачу сжатого воздуха.
Установить бесконтактный датчик.
Включить блок питания.
Выполнение:
Используйте ручной переключатель распределителя с электромагнитнитным управлением, чтобы разместить поршень цилиндра в нужном положении.
Перемещайте датчик вдоль оси цилиндра до тех пор пока, он не сработает, индикатор срабатывания (LED) загорится.
Передвиньте датчик на несколько миллиметров дальше в том же направлении, пока он не переключится обратно (LED выключен).
Разместите датчик посередине между положением включения и положением выключения.
Затяните зажимной винт датчика шестигранным ключом A/F 1.3.
Проведите пробное включение, чтобы проверить переключение датчика в нужных точках (выдвижение/втягивание поршня цилиндра).