

2.3. Завдання зі структурного аналізу механізмів
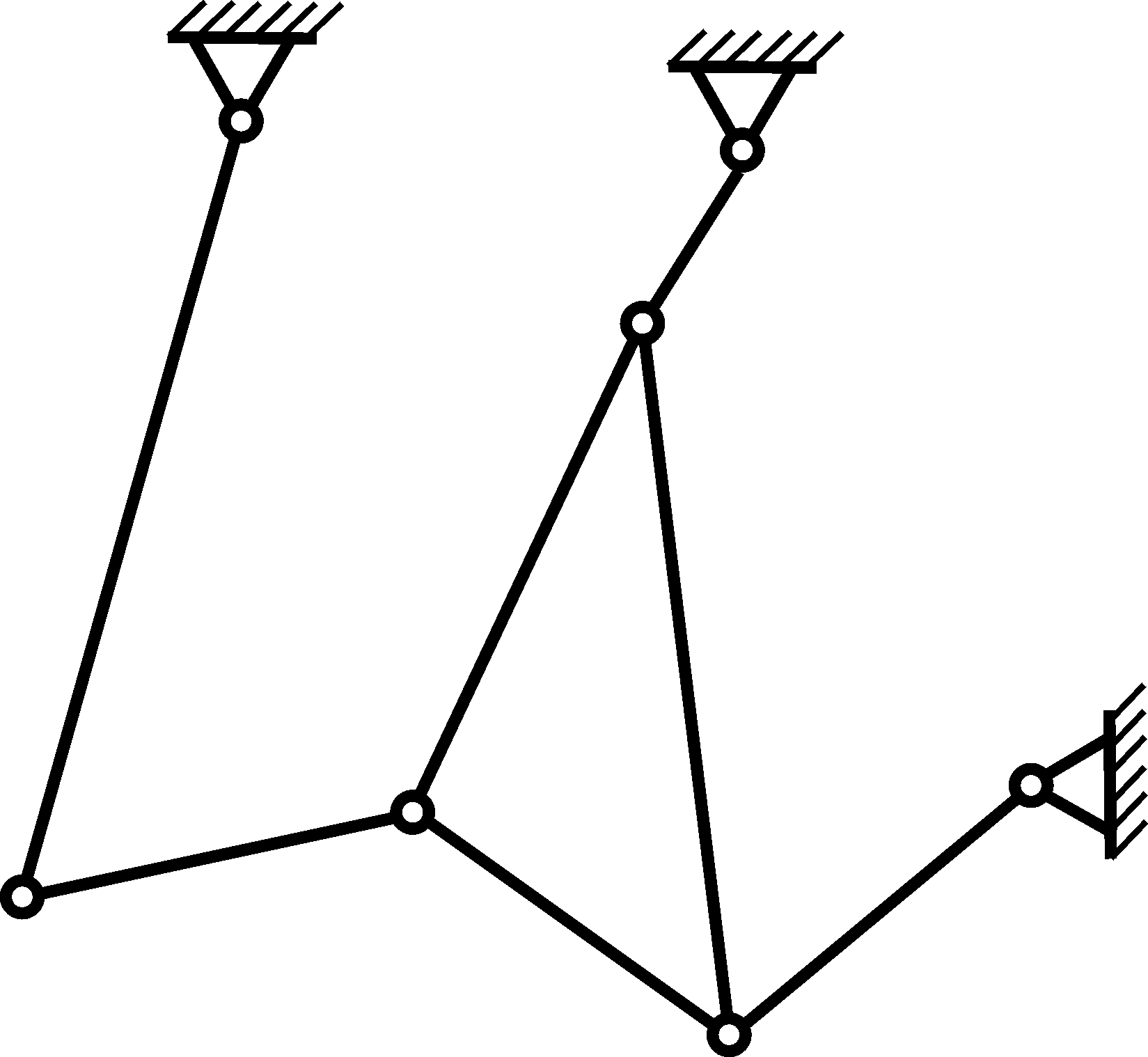
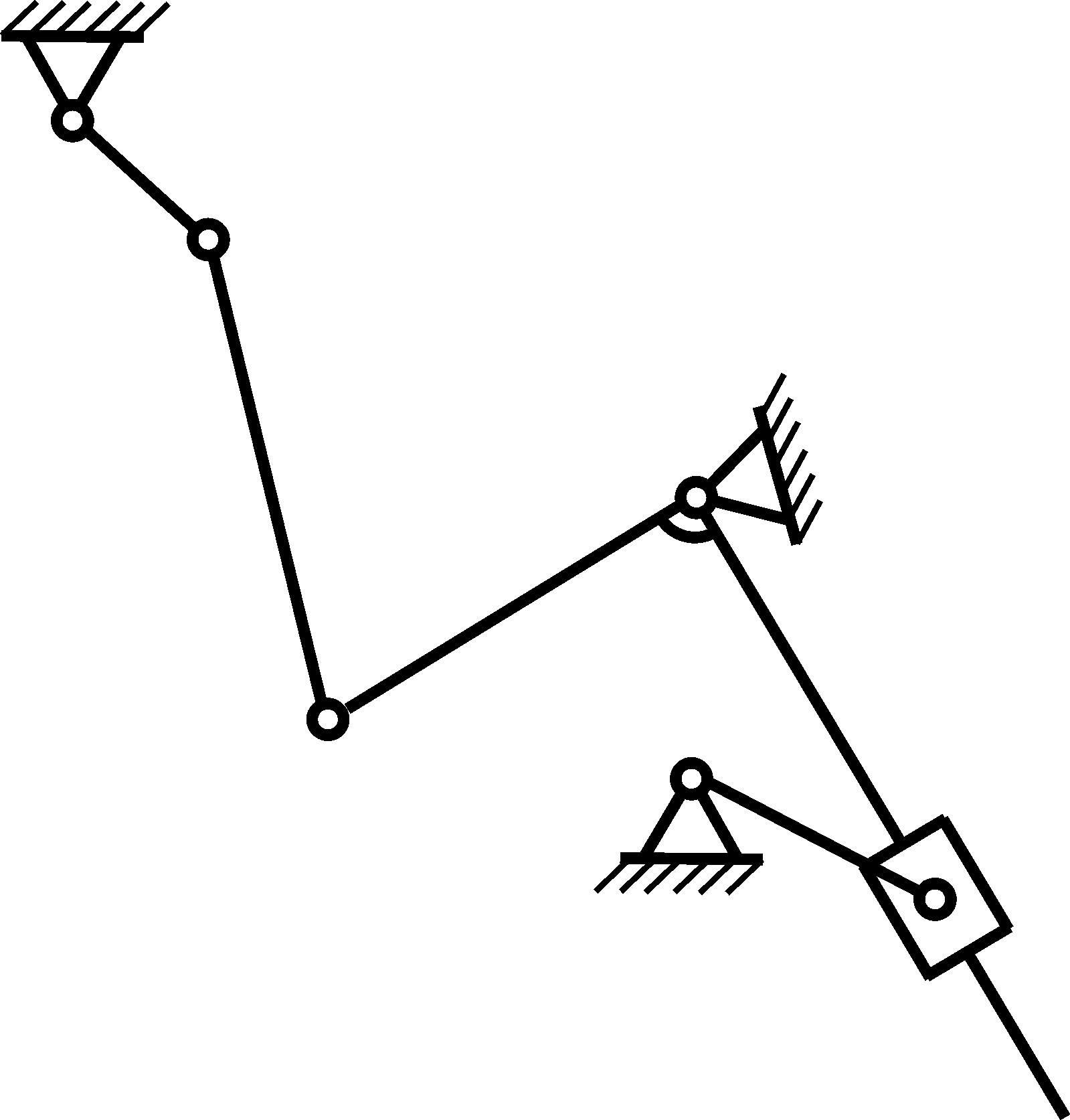
Для одної зі схем важільних механізмів (номер рисунка визначається викладачем) пронумерувати ланки, позначити кінематичні пари. Визначити число ступенів рухомості механізму. Виділити механізм І класу та структурні групи Ассура. Написати формулу будови та визначити клас механізму.
рис. 2.14. механізм поршневого двигуна
|
рис. 2.15. механізм стругального верстата |
рис. 2.16. механізм довбального верстата |
рис. 2.17. механізм компресорного двигуна |
рис. 2.18. механізм для подачі заготовок |
рис. 2.19. механізм преса |
рис. 2.20. механізм поршневого двигуна |
рис. 2.21. механізм поршневого двигуна з причепним шатуном |
рис. 2.22. механізм преса |
рис. 2.23. механізм V – подібного двигуна внутрішнього згорання |
рис. 2.24. механізм для подачі заготовок |
рис. 2.25 |
рис. 2.26 |
рис. 2.27 |
рис. 2.28 |
рис. 2.29 |
рис. 2.30 |
рис. 2.31 |
рис. 2.32 |
рис. 2.33 |
рис. 2.34 |
рис. 2.35 |
рис. 2.36 |
рис. 2.37 |
рис. 2.38 |
рис. 2.39 |
рис. 2.40 |
рис. 2.41 |
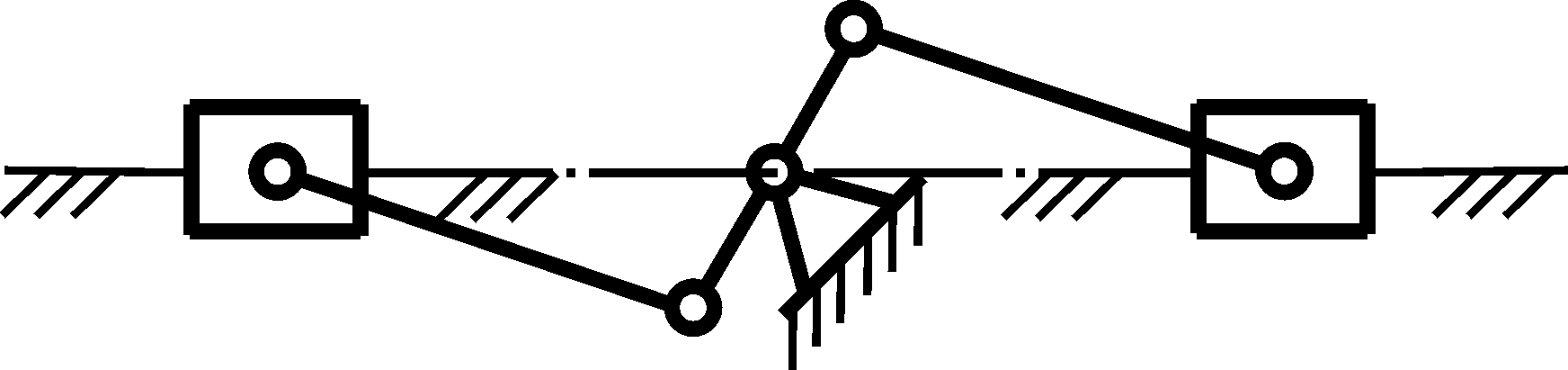
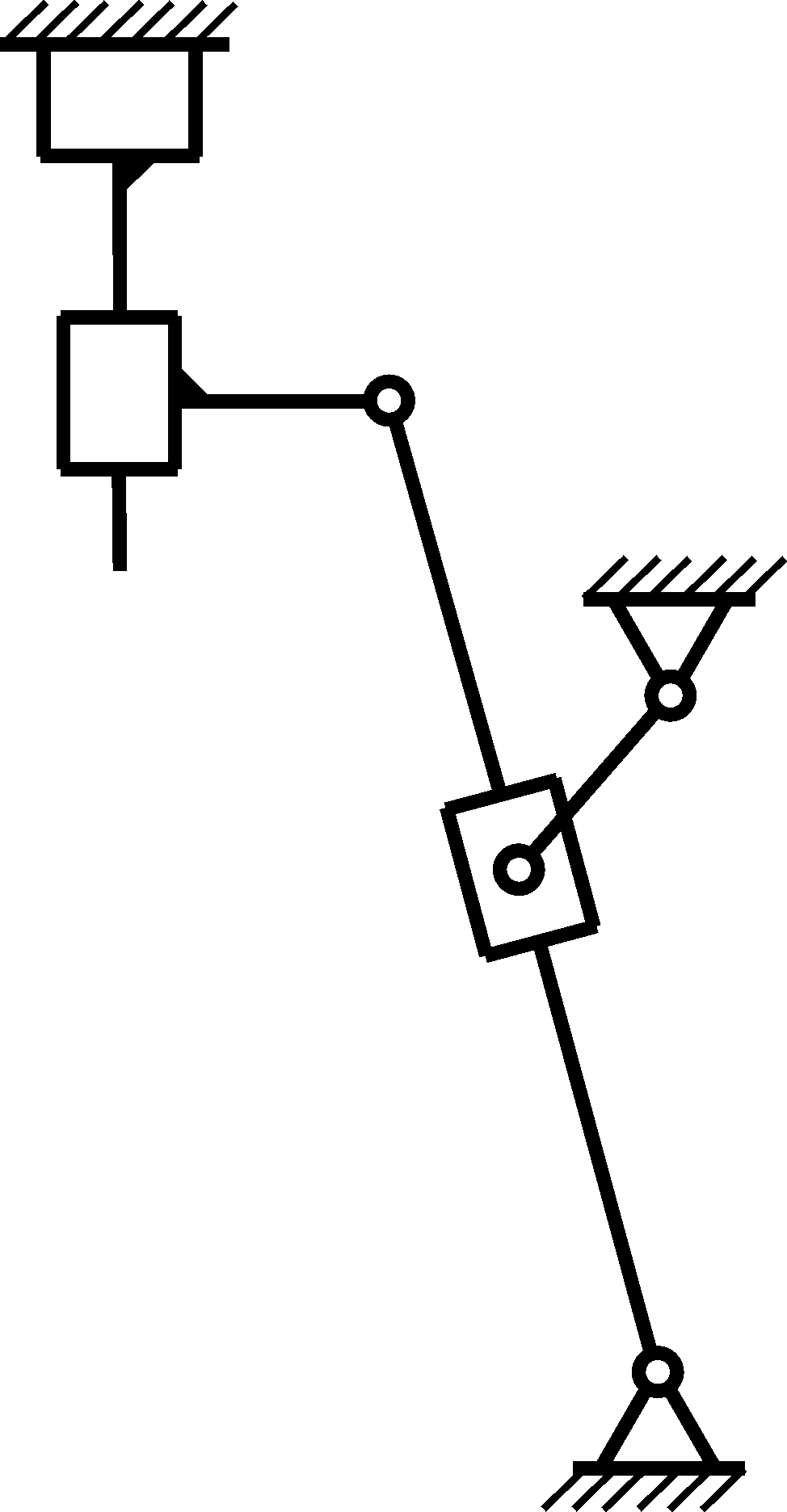
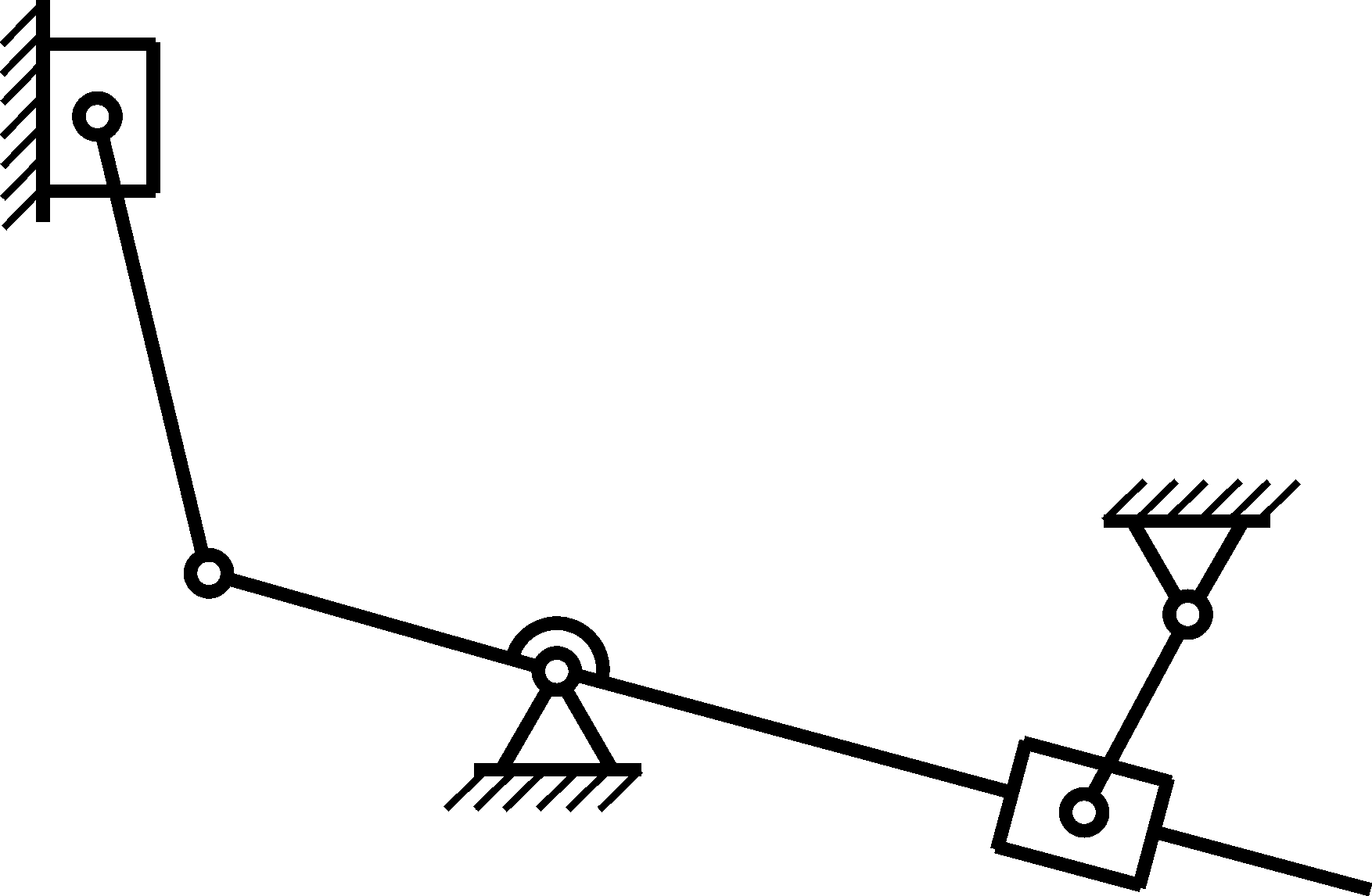


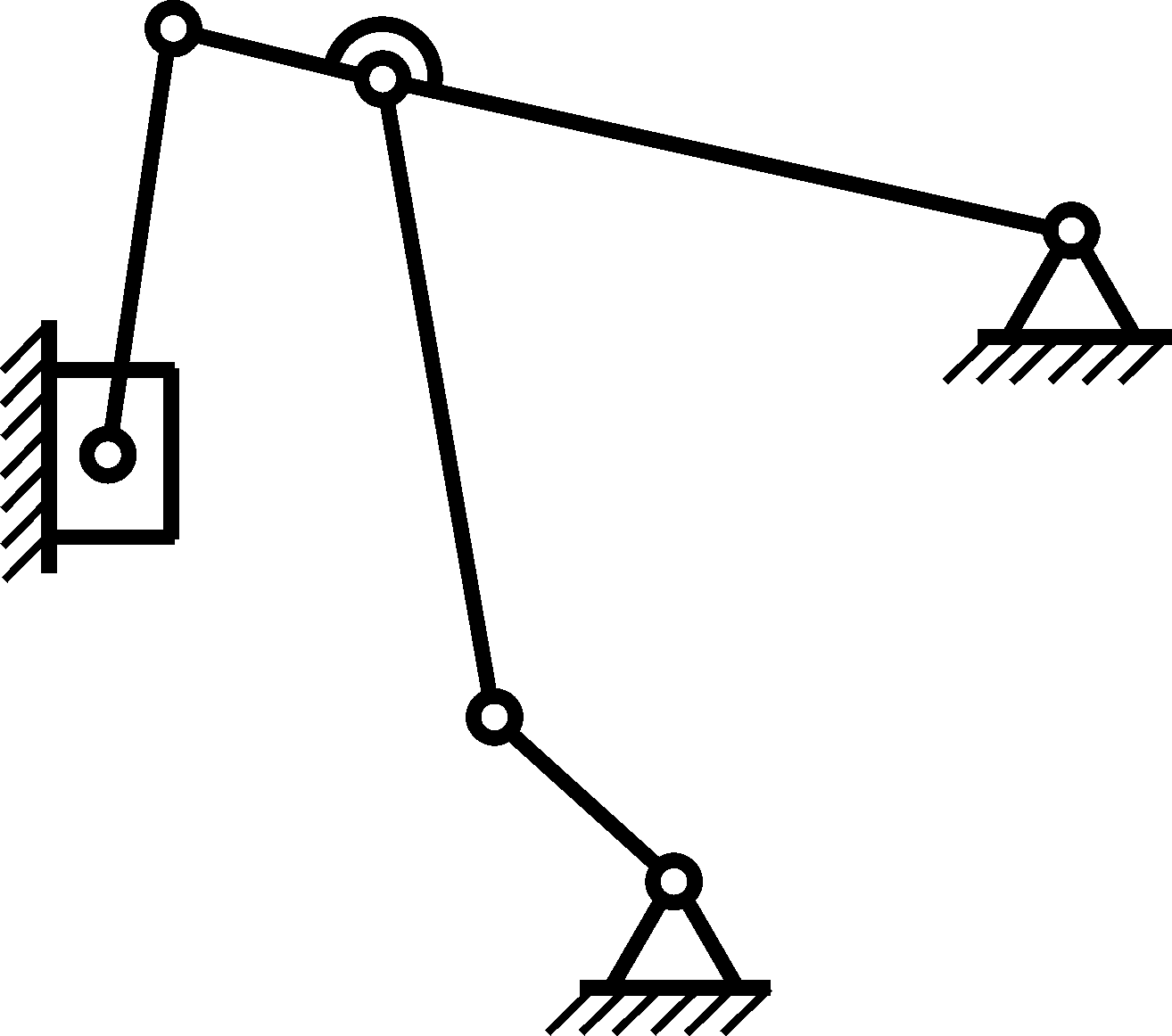
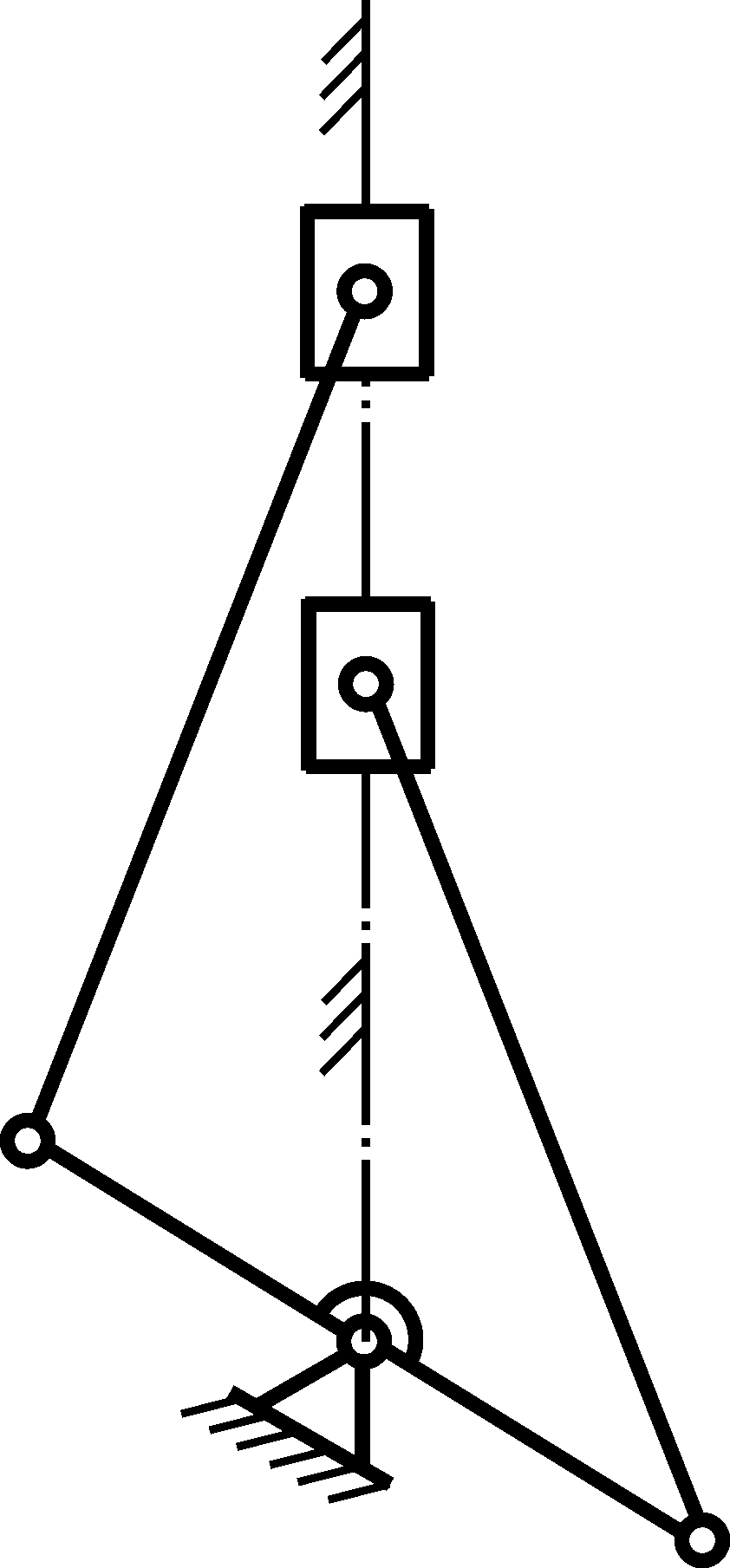
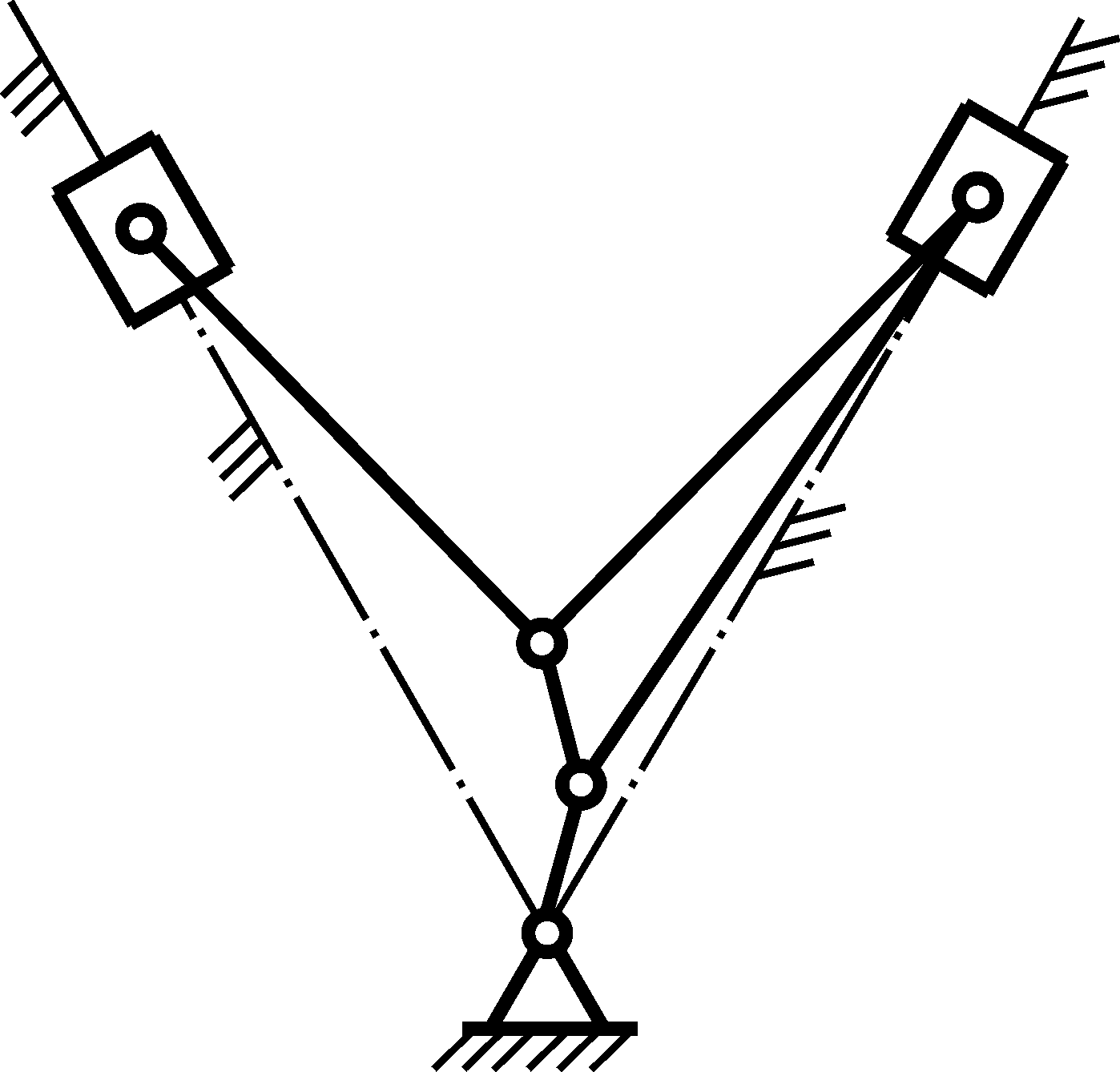
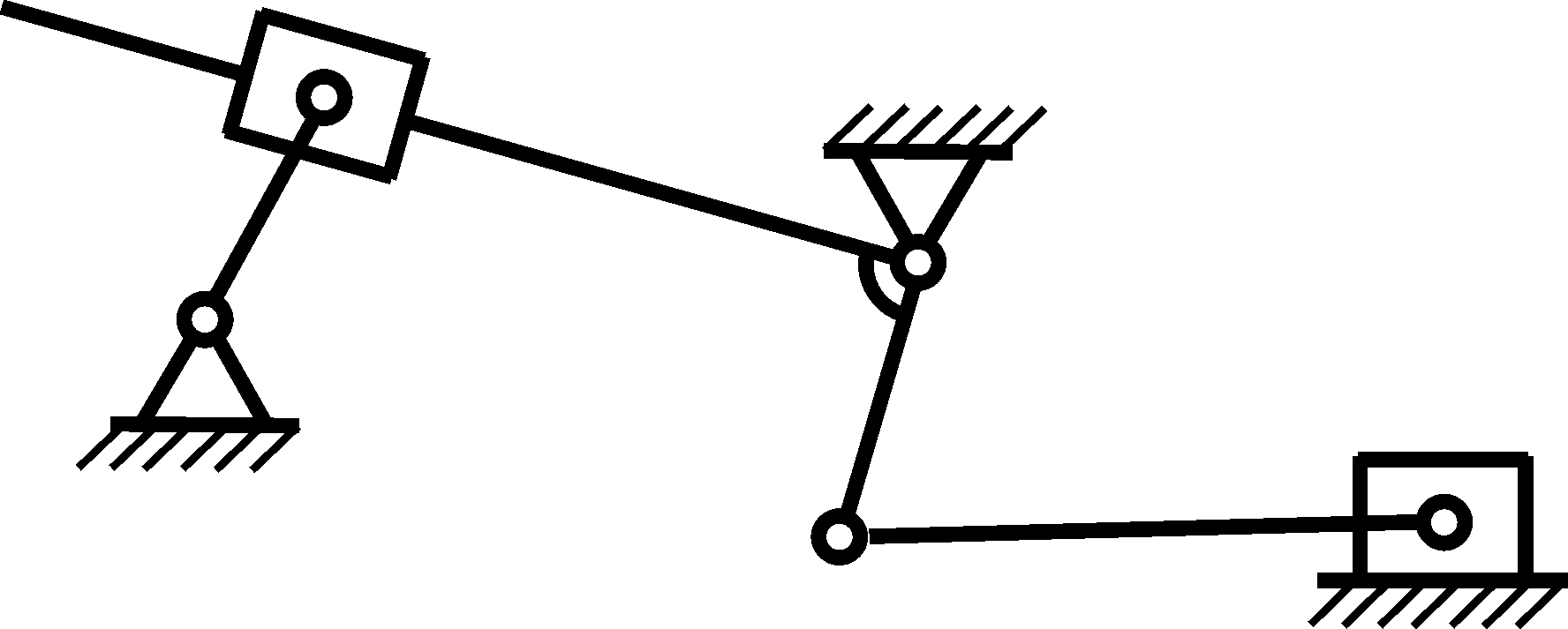
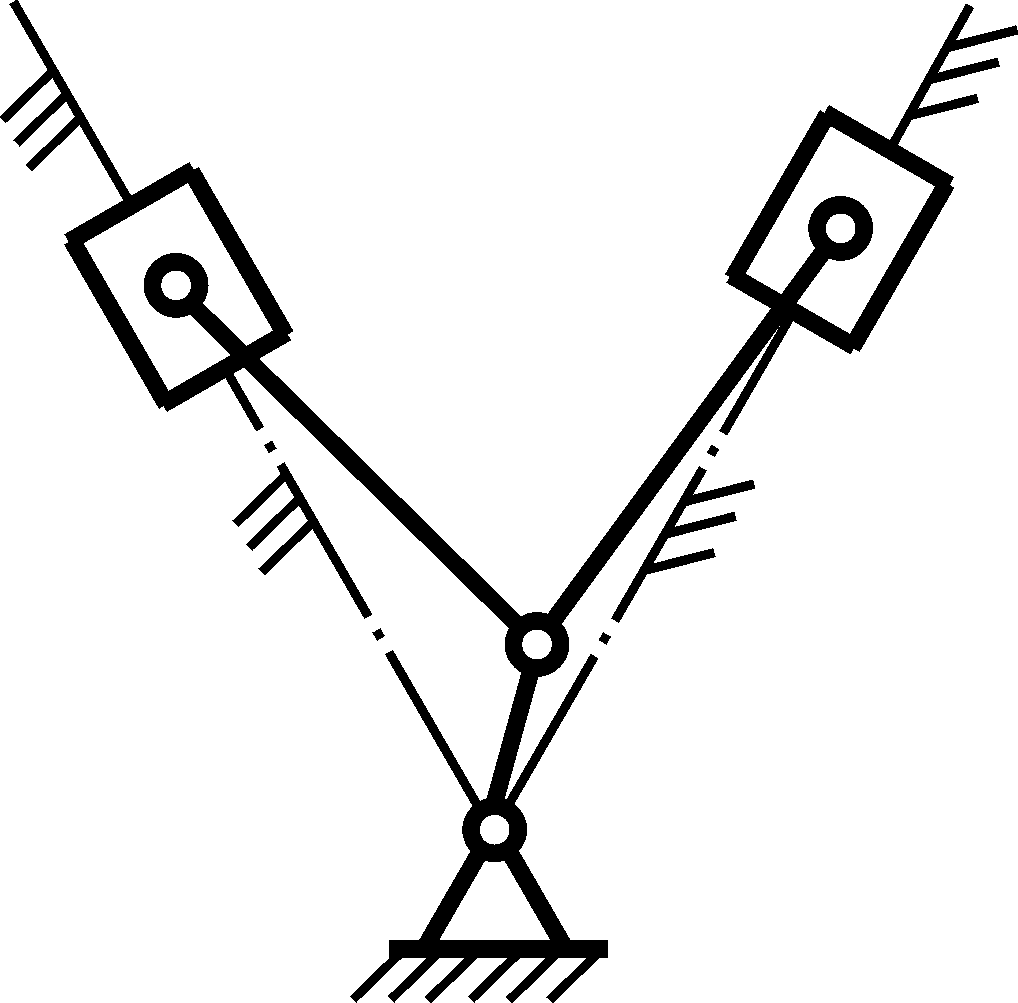
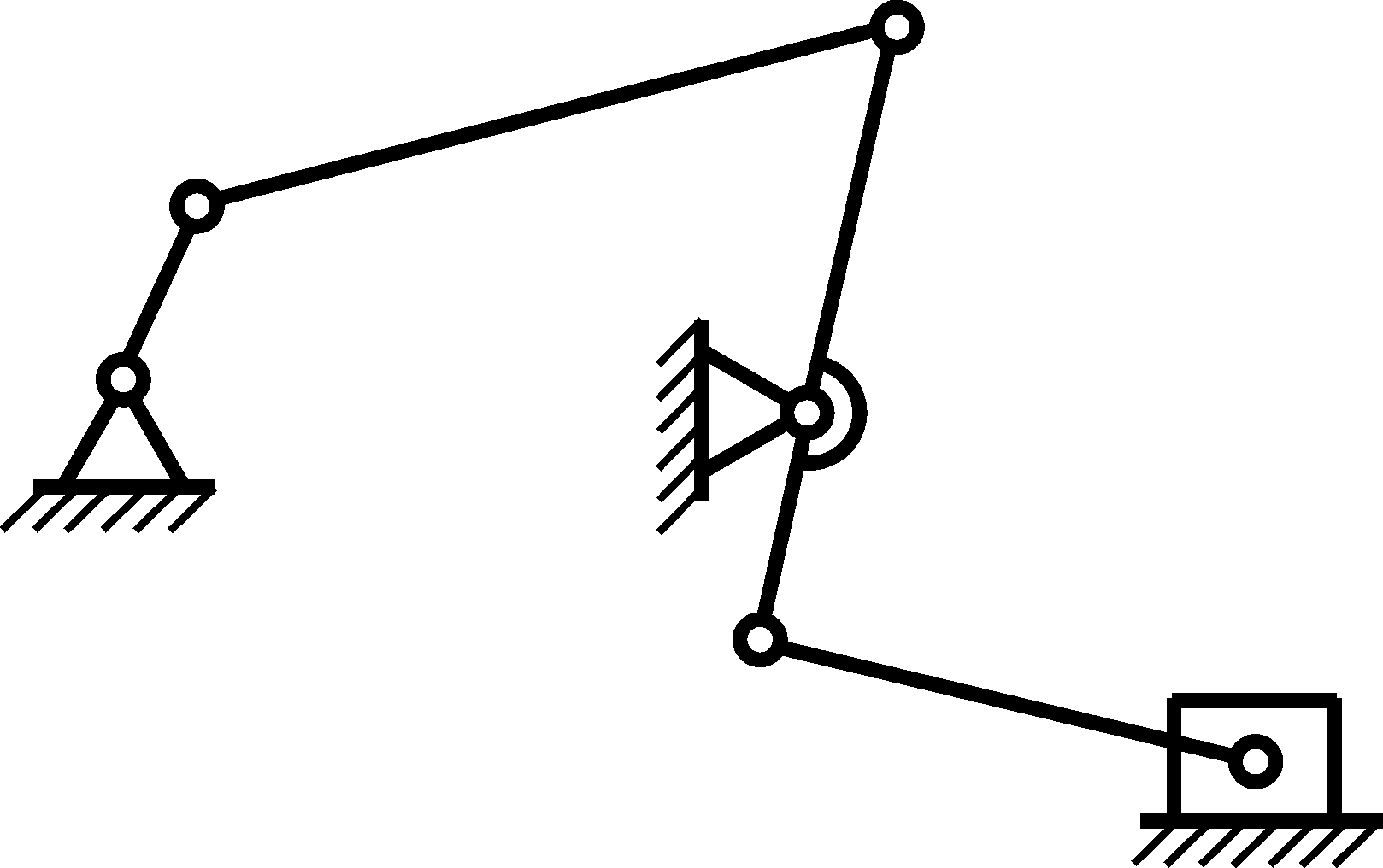

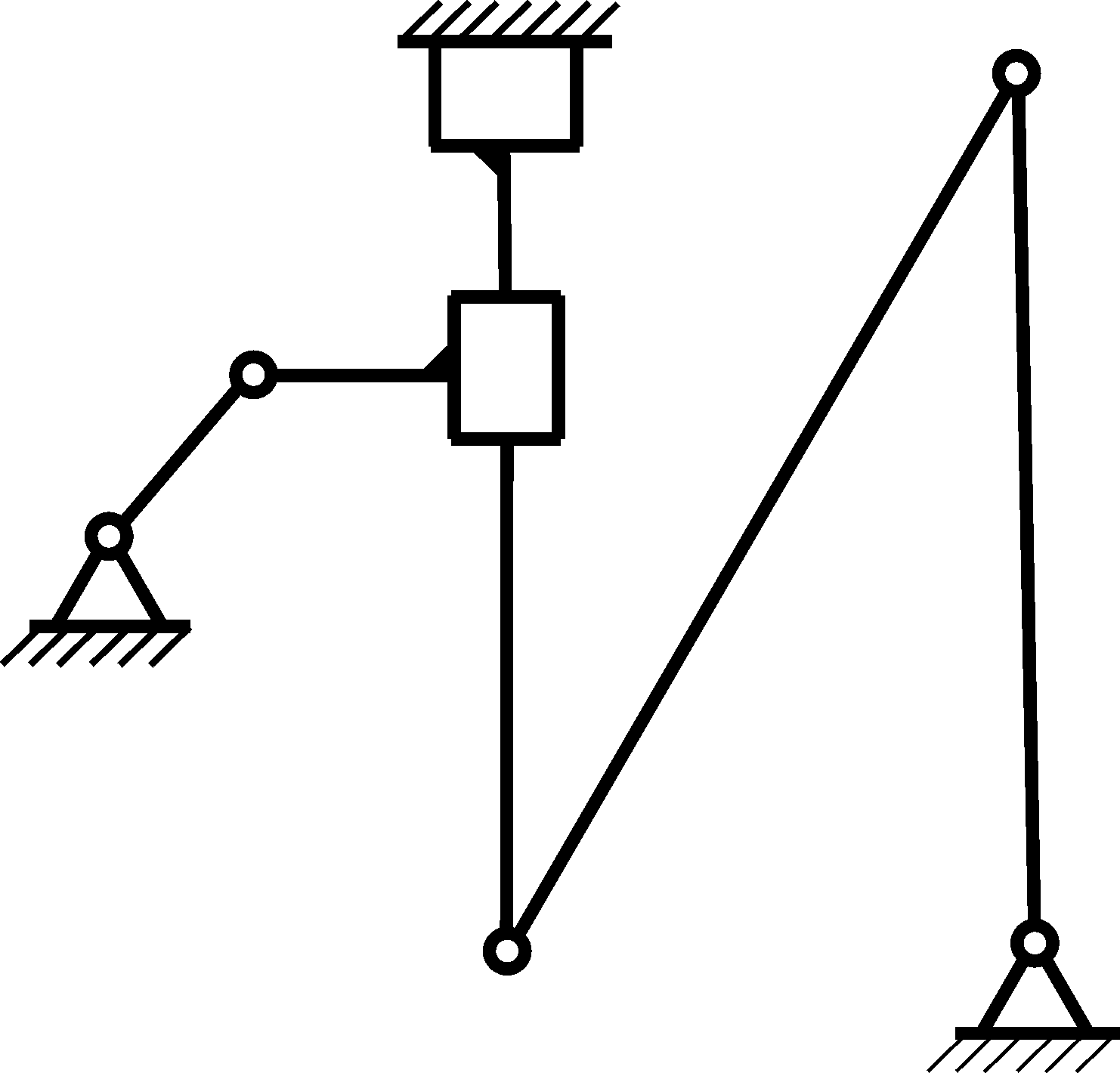
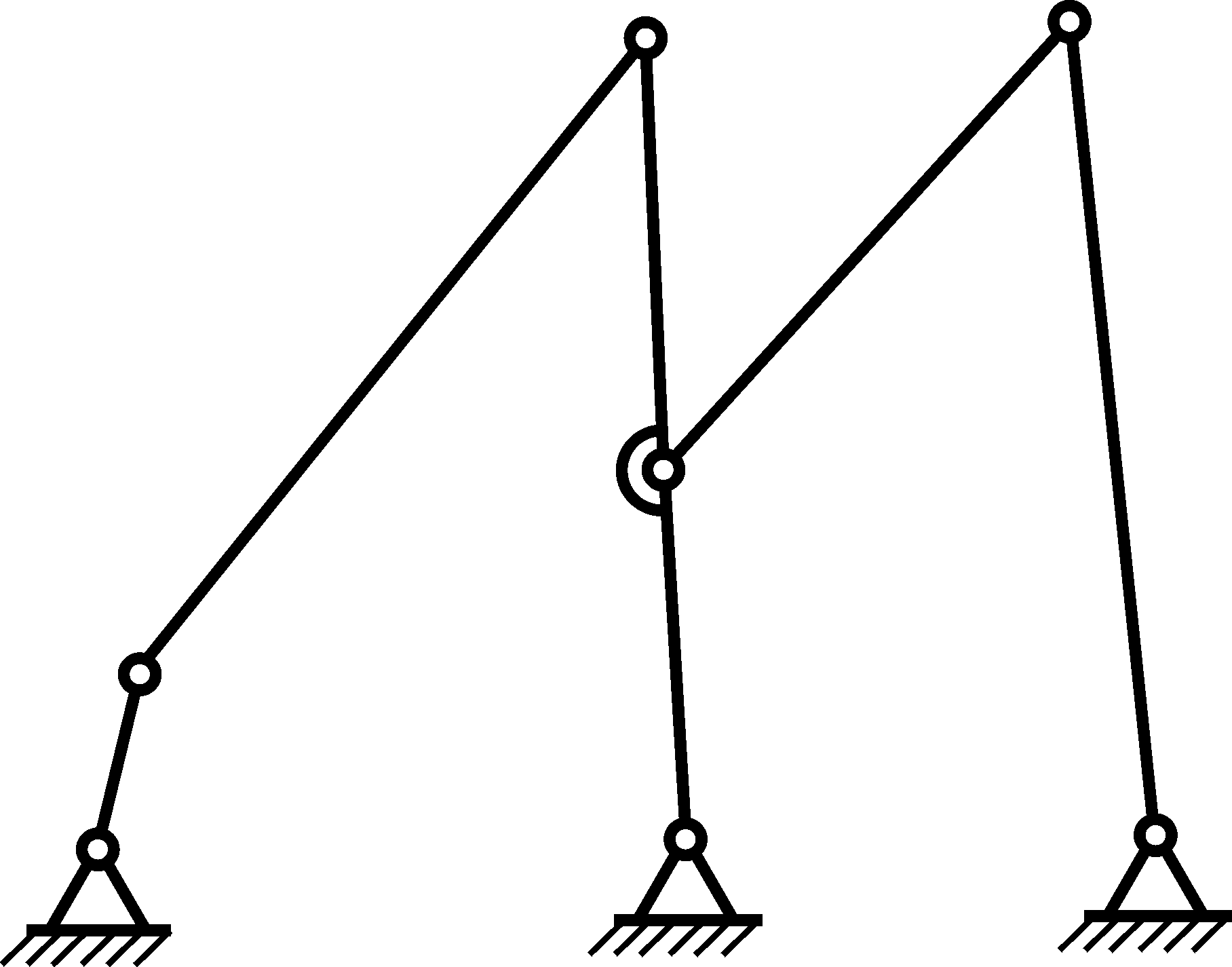
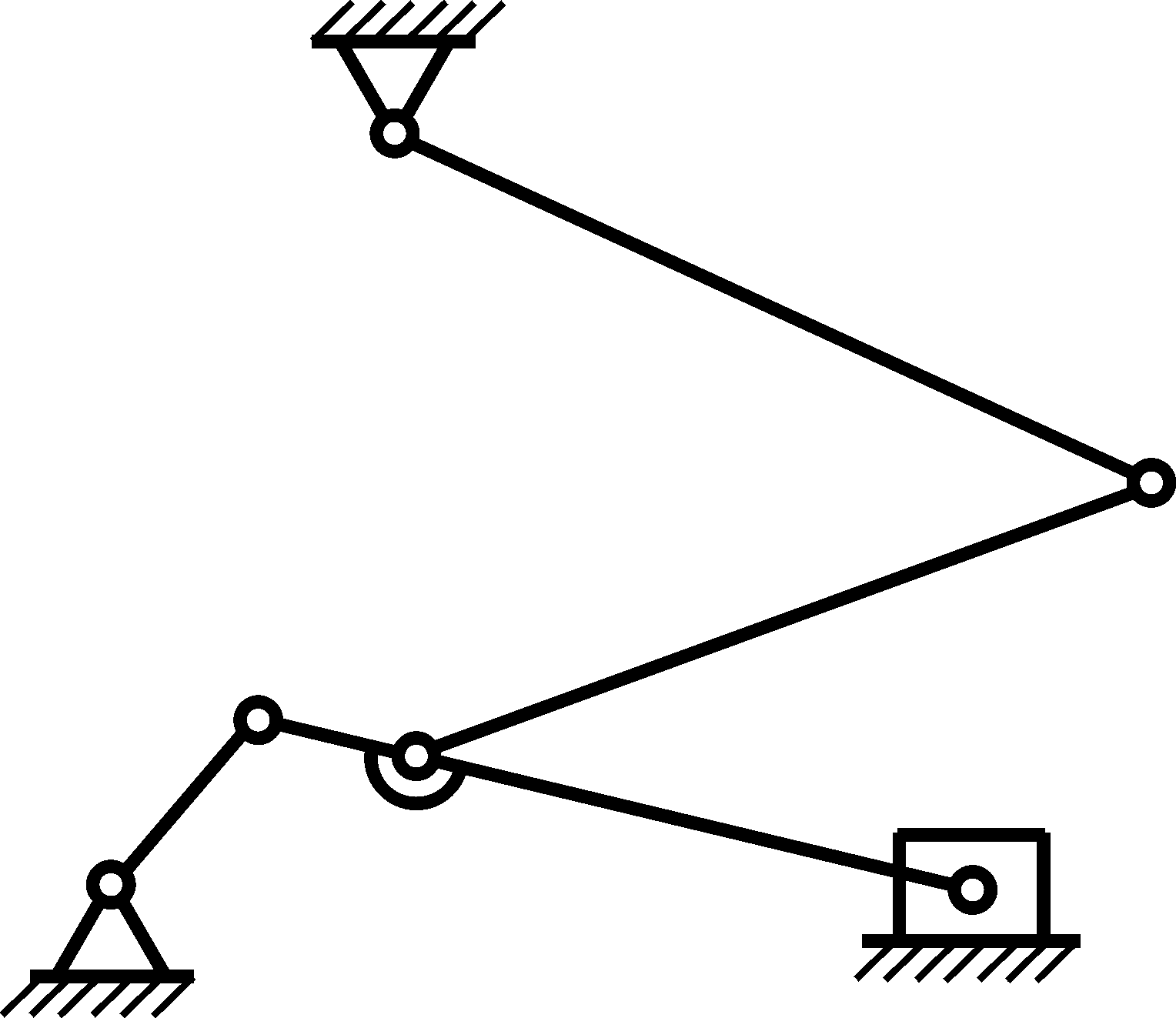
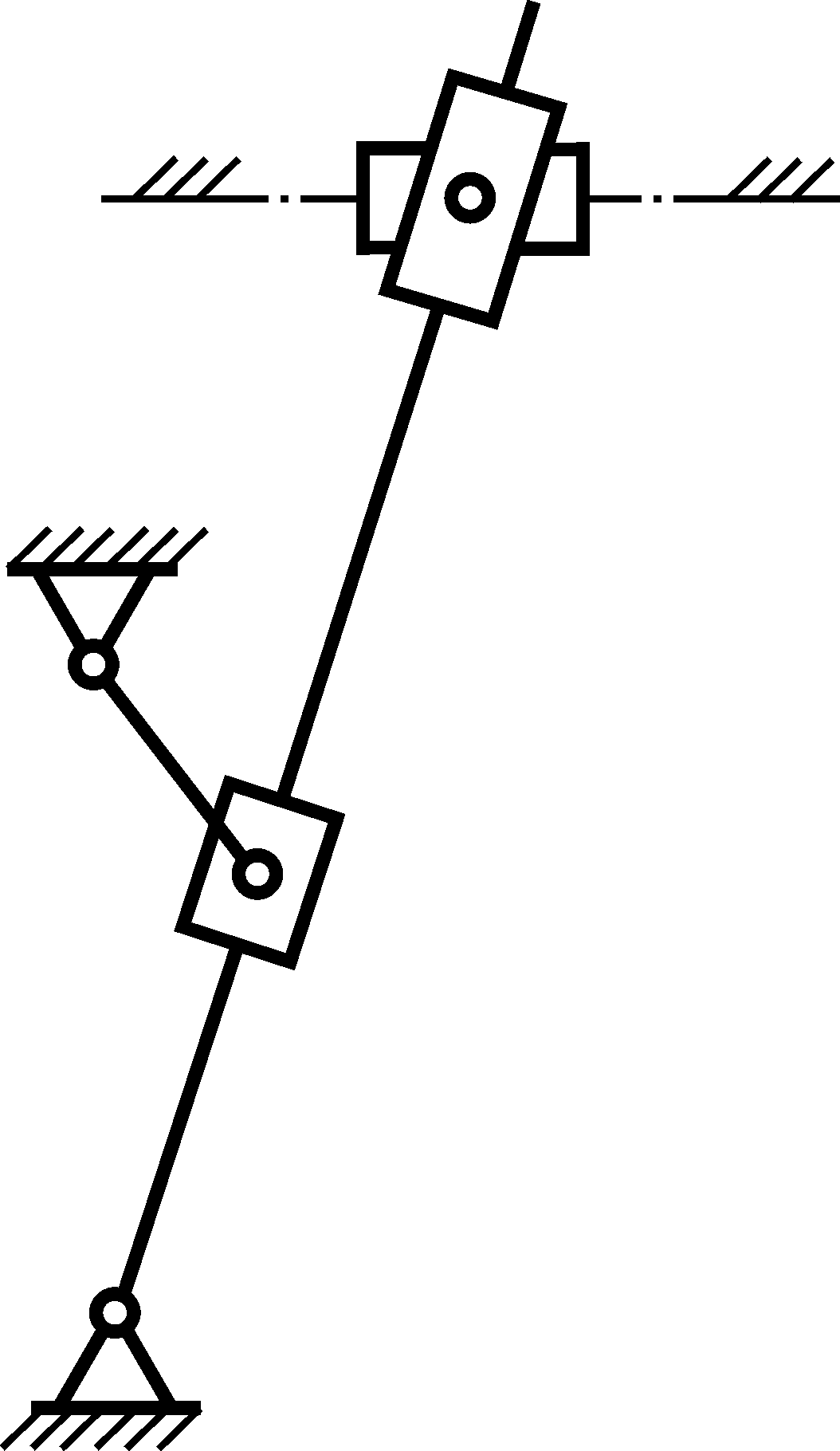
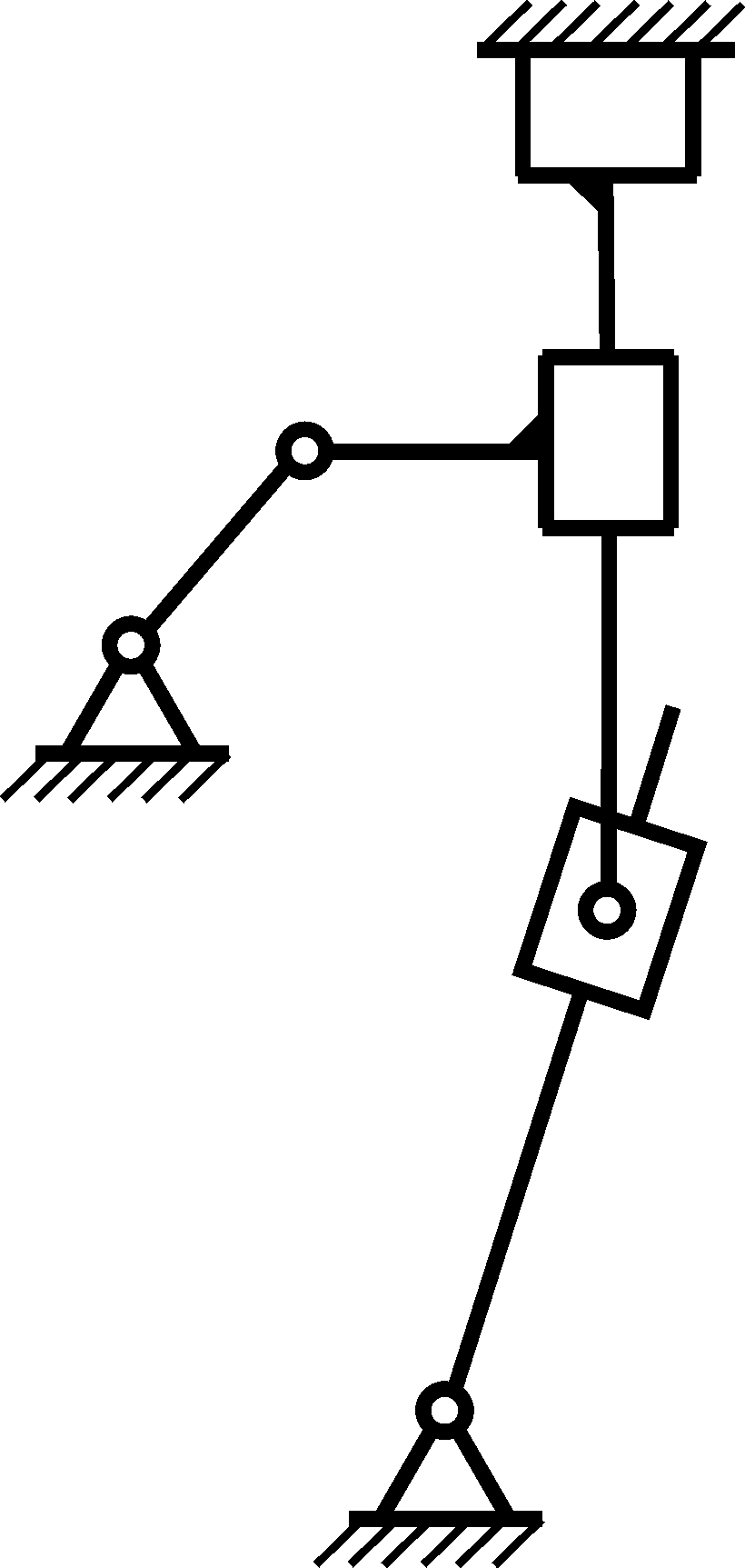


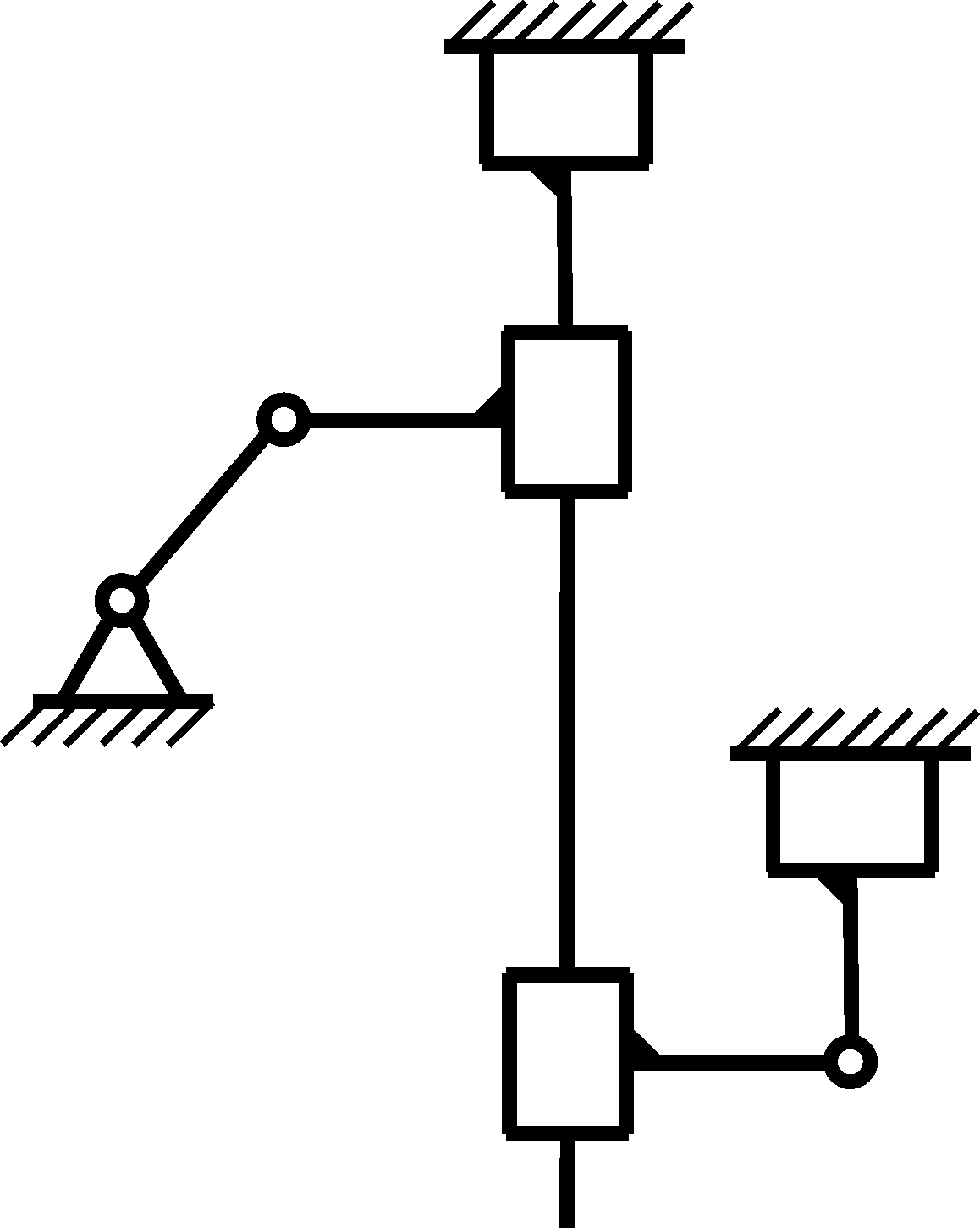
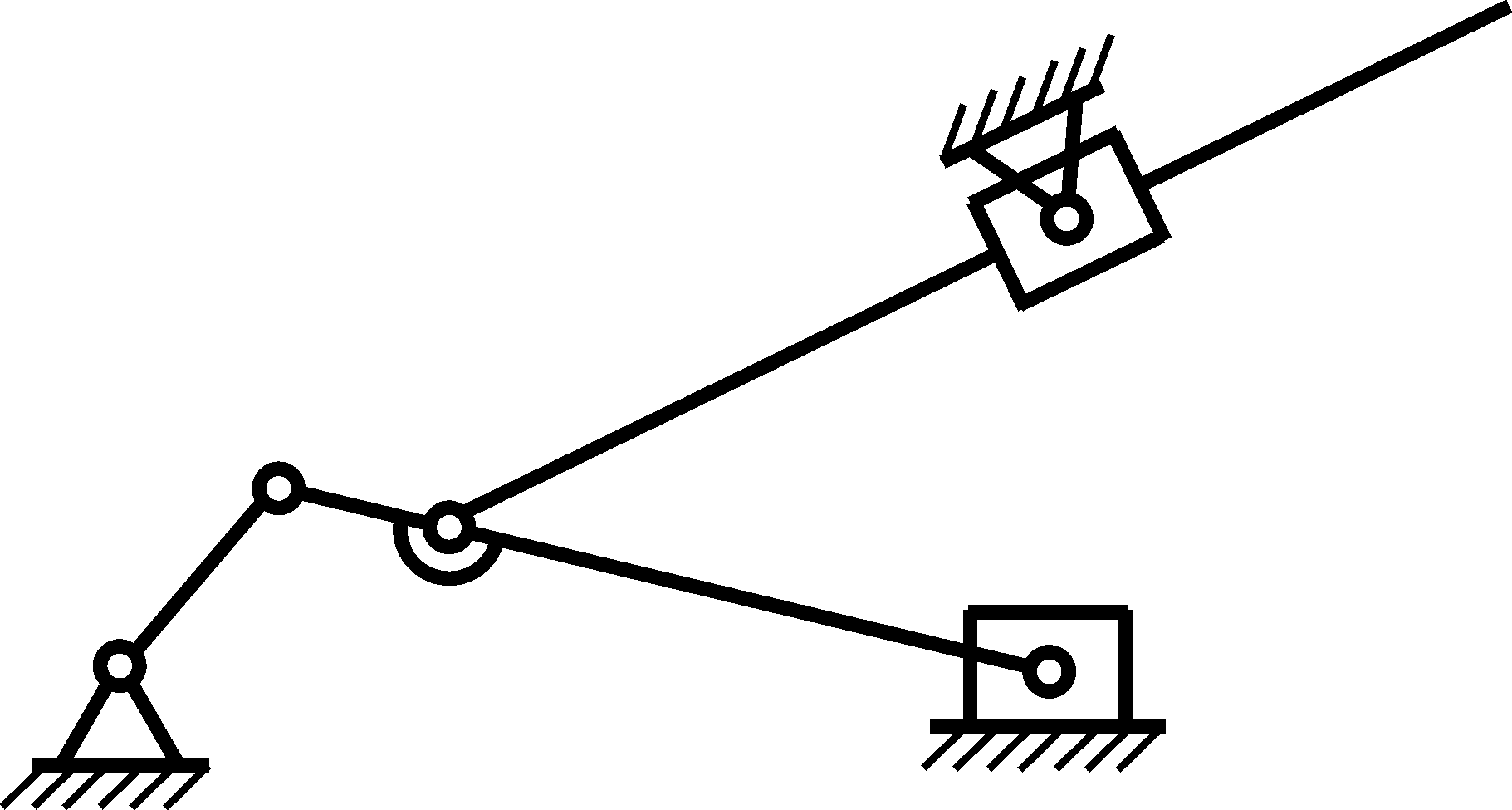

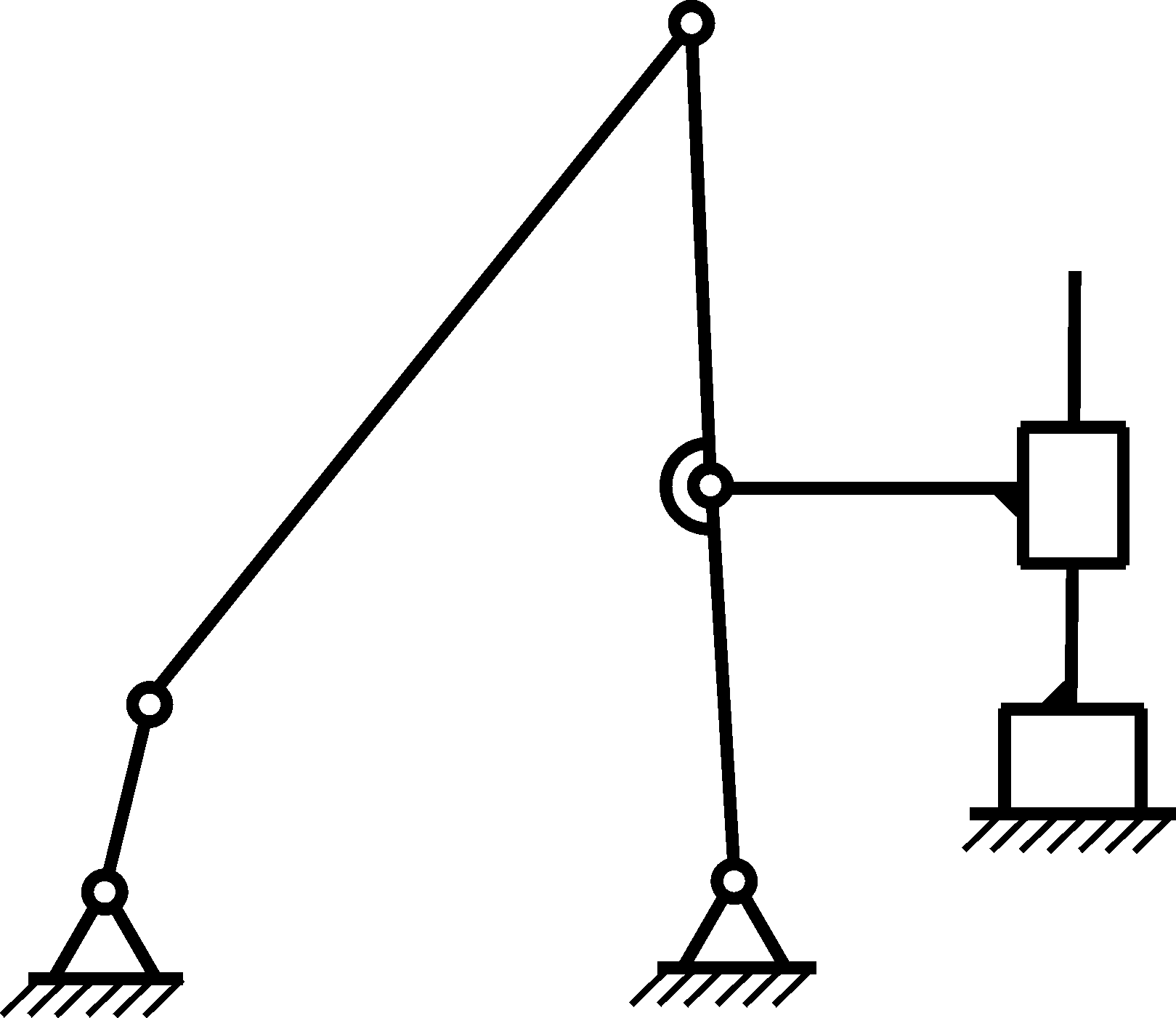
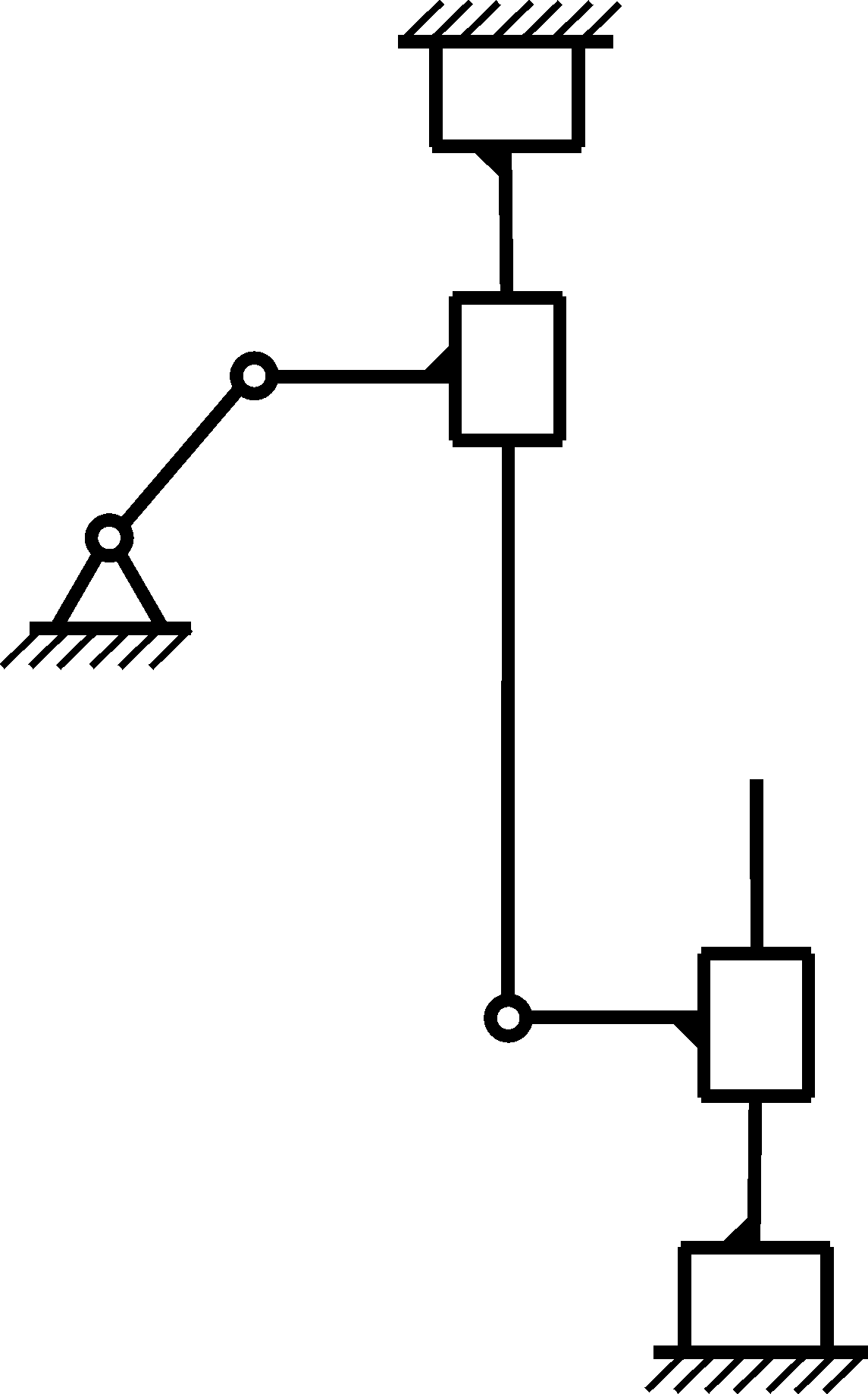
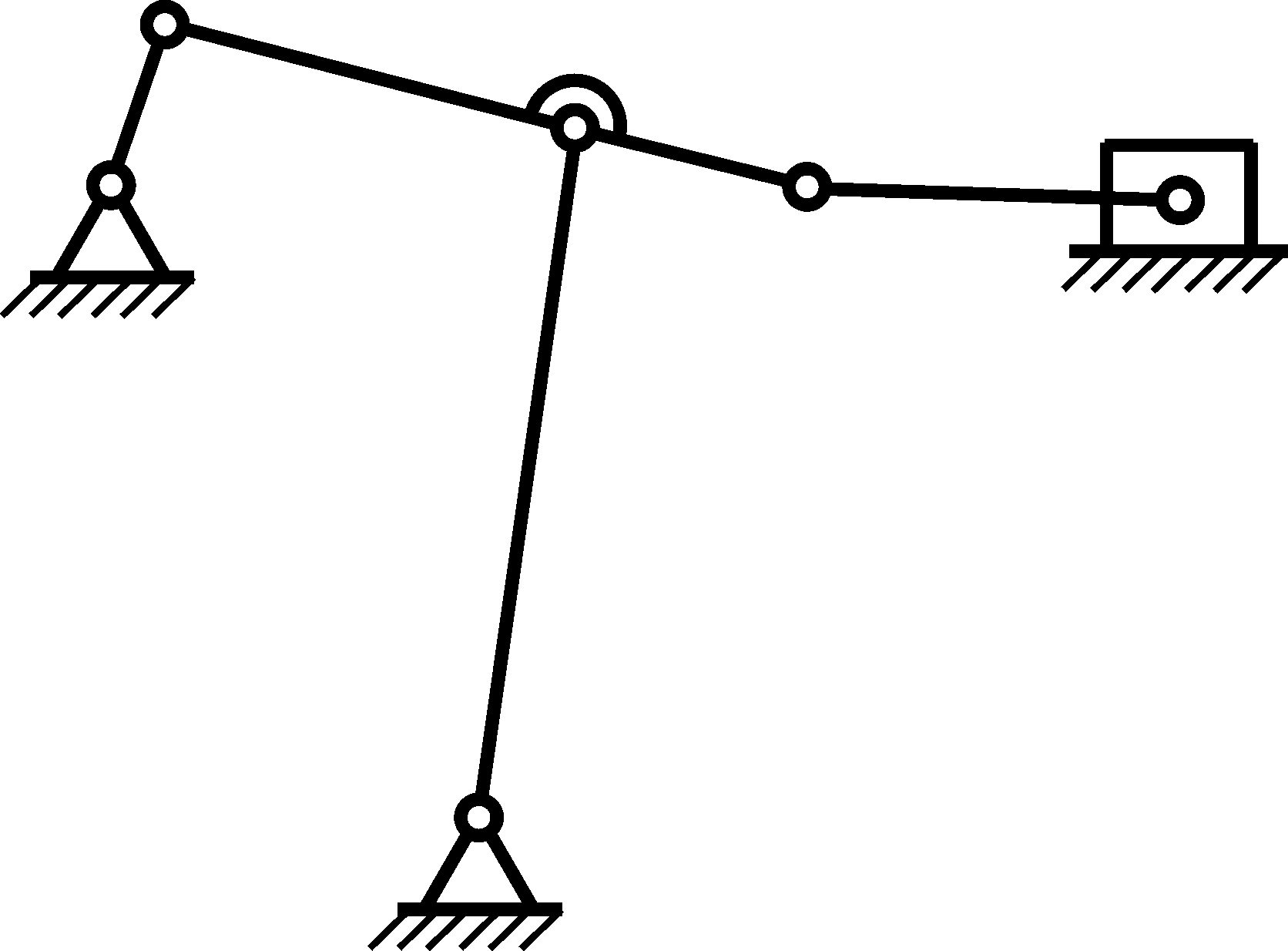

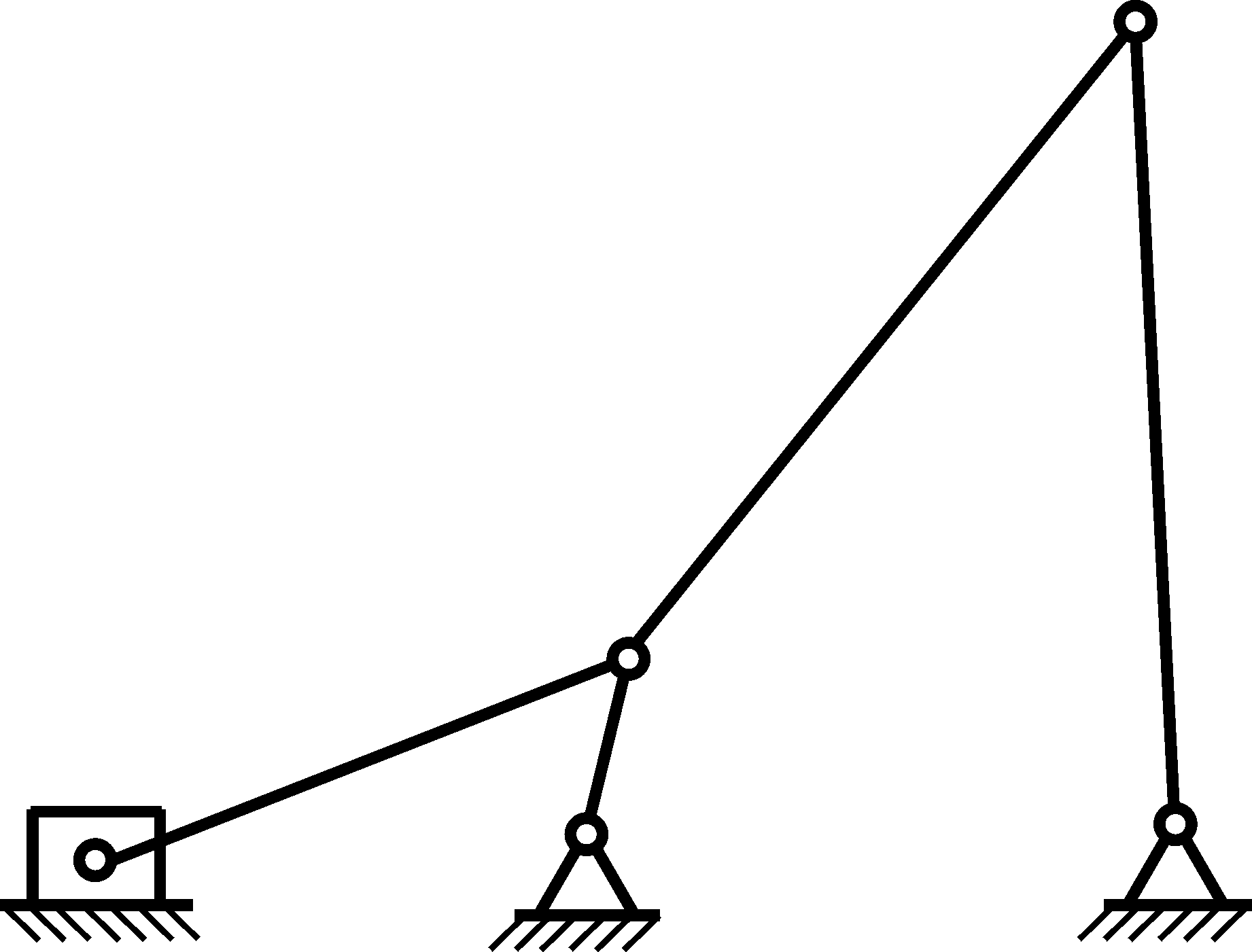
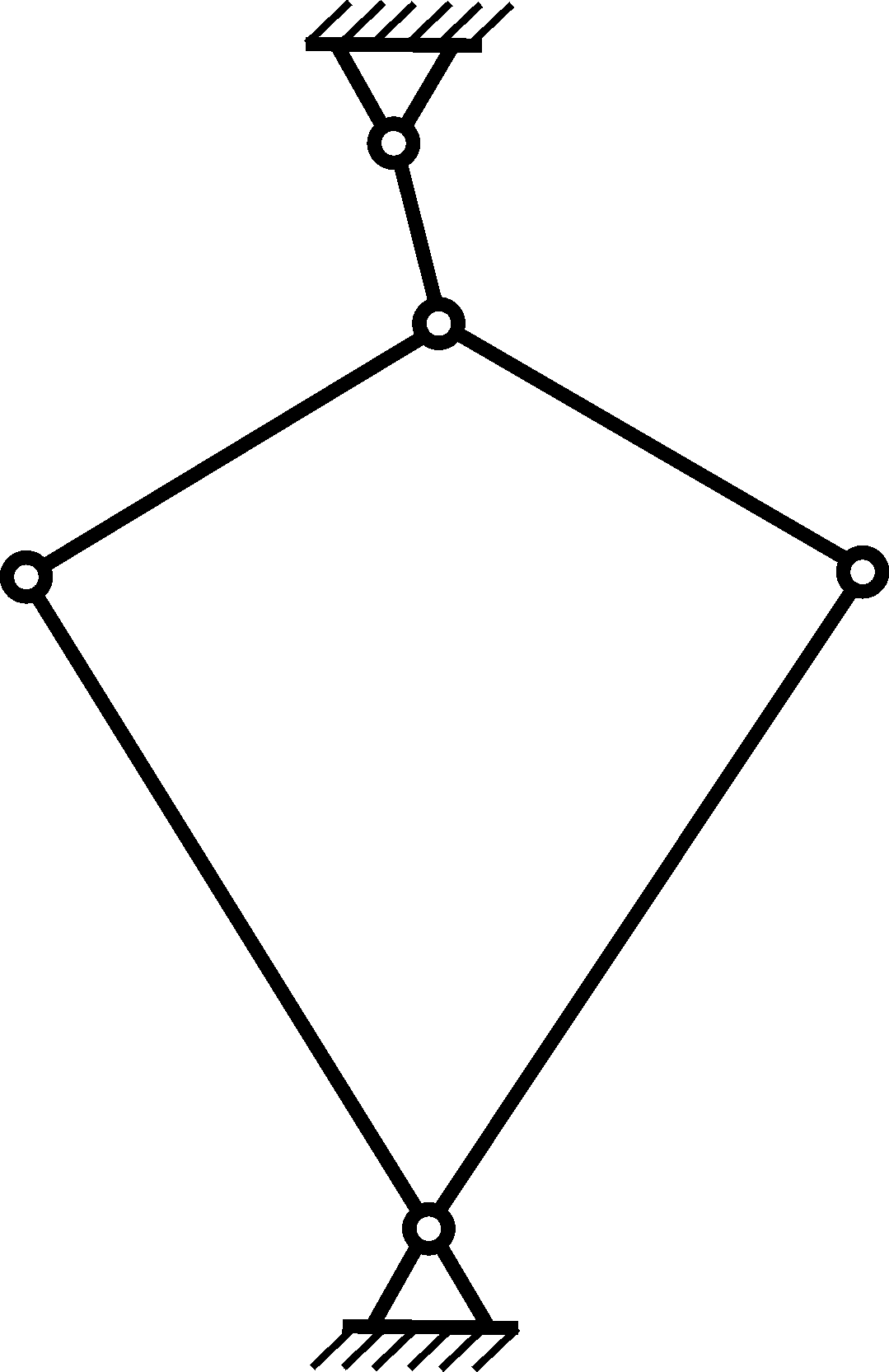
рис. 2.42 |
рис. 2.43 |
Розділ 3. Модуль 2. Кінематичне дослідження важільних механізмів
3.1. Приклади визначення швидкостей та прискорень методом планів
При побудові планів швидкостей і прискорень використовується кінематична схема механізму, якою називається його умовне зображення в масштабі.
Кінематичний аналіз механізмів проводиться починаючи з механізму І класу в порядку приєднання груп Ассура.
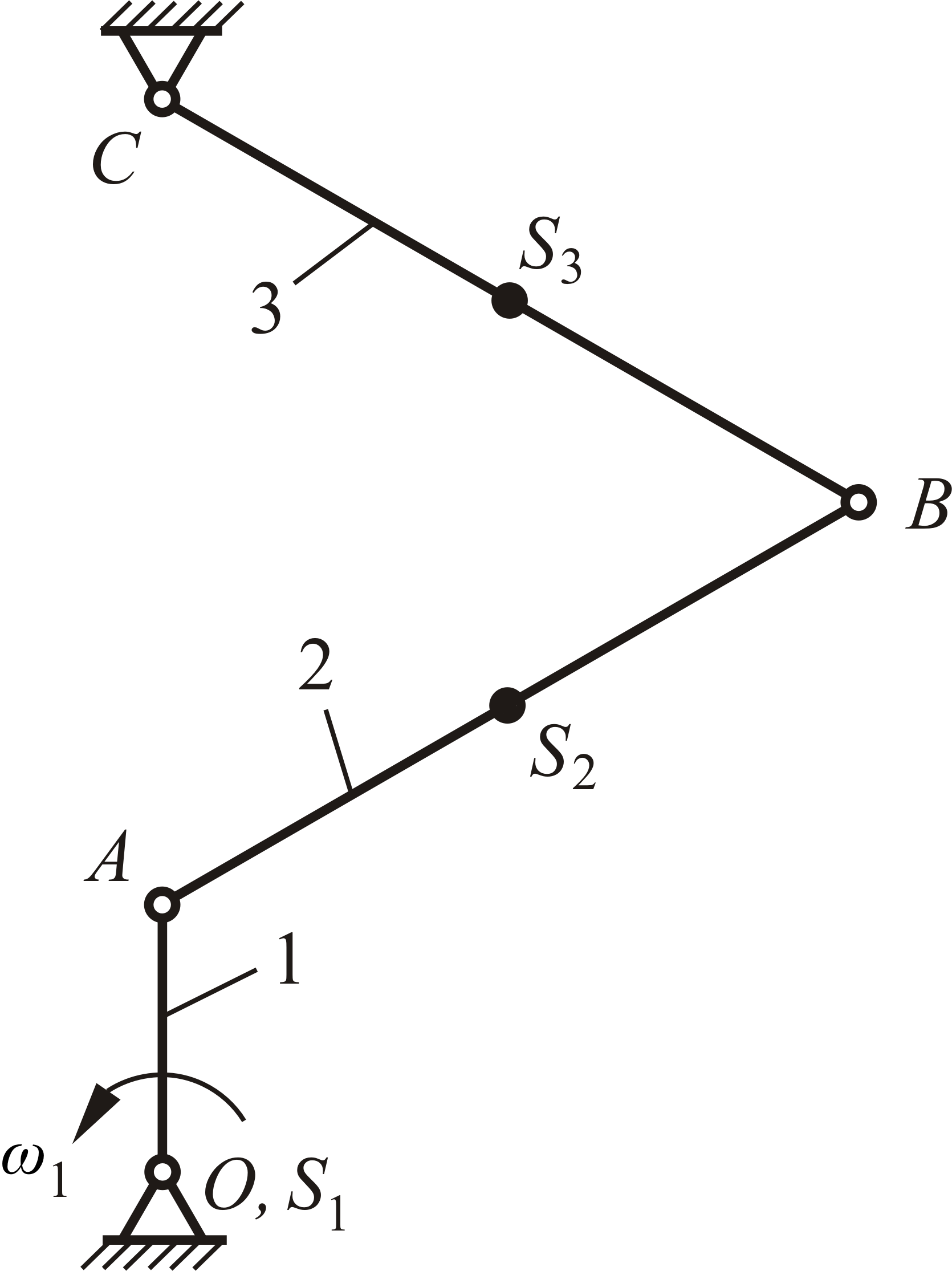
Розглянемо побудову планів для кривошипно-коромислового механізму.
Кінематичну схему механізму (рис. 3.1, а) будуємо в масштабі довжин
![]() ,
м/мм,
,
м/мм,
де lOA, м, – довжина кривошипа; ОА, мм, – довжина відповідного відрізка на кресленні.
а б
в
рис. 3.1
Якщо кутова
швидкість
![]() кривошипа безпосередньо не задана, то
вона визначається за формулою
кривошипа безпосередньо не задана, то
вона визначається за формулою
![]() ,
с–1,
,
с–1,
де n1, хв–1 – частота обертання кривошипа або число обертів.
Розглянемо побудову плану швидкостей. Швидкість точки А кривошипа
![]() ,
мс–1.
,
мс–1.
Масштаб швидкостей усього механізму
![]() ,
мс–1/мм.
,
мс–1/мм.
Довжина відрізка
ра,
мм, вибирається так, щоб розміри плану
всього механізму були в прийнятних
межах і масштаб
![]() мав по можливості одну значущу цифру.
На площині вибираємо точку – полюс р
(рис. 3.1, б). Від полюса р
відкладаємо
перпендикулярно ОА
в бік обертання відрізок
мав по можливості одну значущу цифру.
На площині вибираємо точку – полюс р
(рис. 3.1, б). Від полюса р
відкладаємо
перпендикулярно ОА
в бік обертання відрізок
![]() ,
який зображає в масштабі
швидкість точки А
кривошипа. Швидкості точок О,
С
та центра мас S1
кривошипа дорівнюють нулю, тому відповідні
точки о,
с,
s1
на плані
співпадають з полюсом р.
,
який зображає в масштабі
швидкість точки А
кривошипа. Швидкості точок О,
С
та центра мас S1
кривошипа дорівнюють нулю, тому відповідні
точки о,
с,
s1
на плані
співпадають з полюсом р.
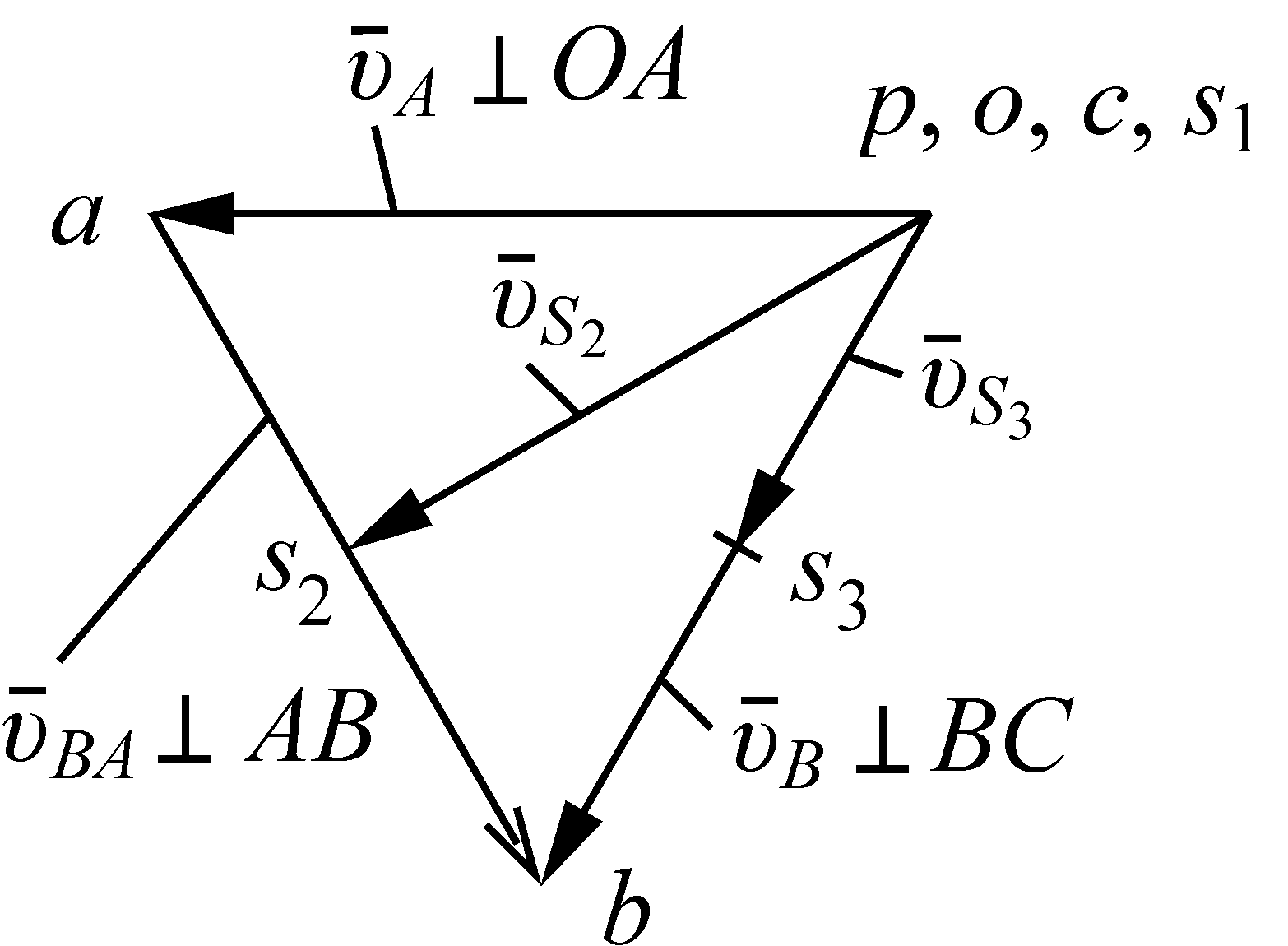
Швидкість точки В визначається відповідно до векторного рівняння
![]()
де
![]() – швидкість точки В
відносно А,
перпендикулярна до АВ.
Оскільки точка В
лежить на коромислі 3, то її швидкість
перпендикулярна ВС.
Швидкість
– швидкість точки В
відносно А,
перпендикулярна до АВ.
Оскільки точка В
лежить на коромислі 3, то її швидкість
перпендикулярна ВС.
Швидкість
![]() зображається на плані відрізком
зображається на плані відрізком
![]() ,
а
,
а
![]() ,
так що останнє рівняння у відрізках
плану запишеться
,
так що останнє рівняння у відрізках
плану запишеться
![]()
Проводимо перпендикуляри: з точки А – до АВ, а з полюса р – до ВС. На їх перетині знаходиться точка b.
Швидкості
![]() .
.
Кутові швидкості шатуна 2 і коромисла 3
![]() ,
с
,
с![]() ,
,
де lAB , lBC , м, – відстані між відповідними точками.
Визначимо їх
напрями. Виділяємо ланку 2 (рис. 3.2, а).
Точка В
разом з ланкою 2 рухається навколо
нерухомої у відносному русі точки А
в напрямі швидкості
.
Тоді для даного положення шатун 2
обертається за стрілкою годинника з
кутовою швидкістю
![]() .
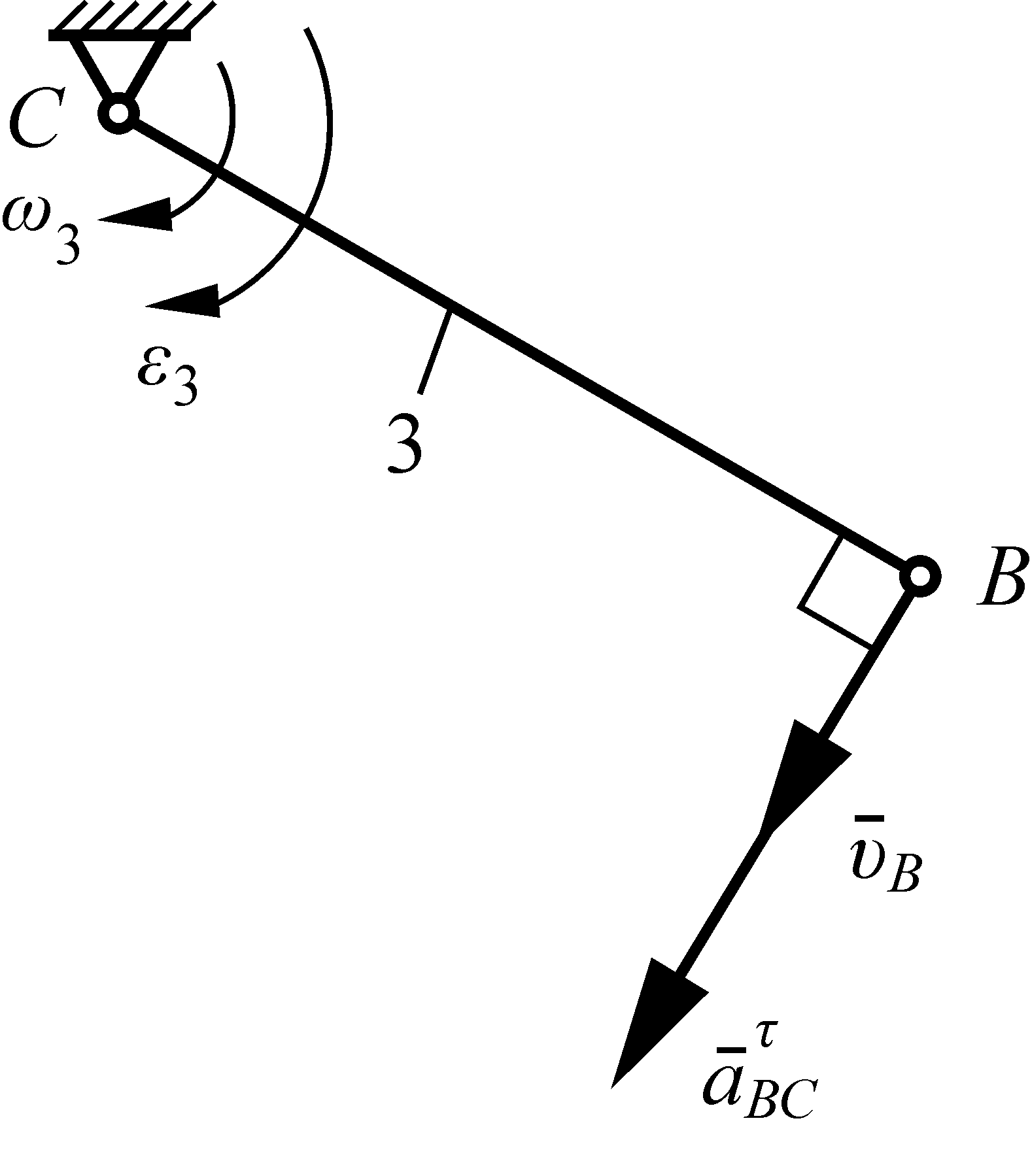
Виділяємо ланку 3 (рис. 3.2, б). Точка
В
разом з ланкою 3 рухається навколо
нерухомої точки С
у напрямі швидкості
.
Виділяємо ланку 3 (рис. 3.2, б). Точка
В
разом з ланкою 3 рухається навколо
нерухомої точки С
у напрямі швидкості
![]() .
У цьому випадку коромисло 3 повертається
за стрілкою годинника з кутовою швидкістю
.
У цьому випадку коромисло 3 повертається
за стрілкою годинника з кутовою швидкістю
![]() .
.
а 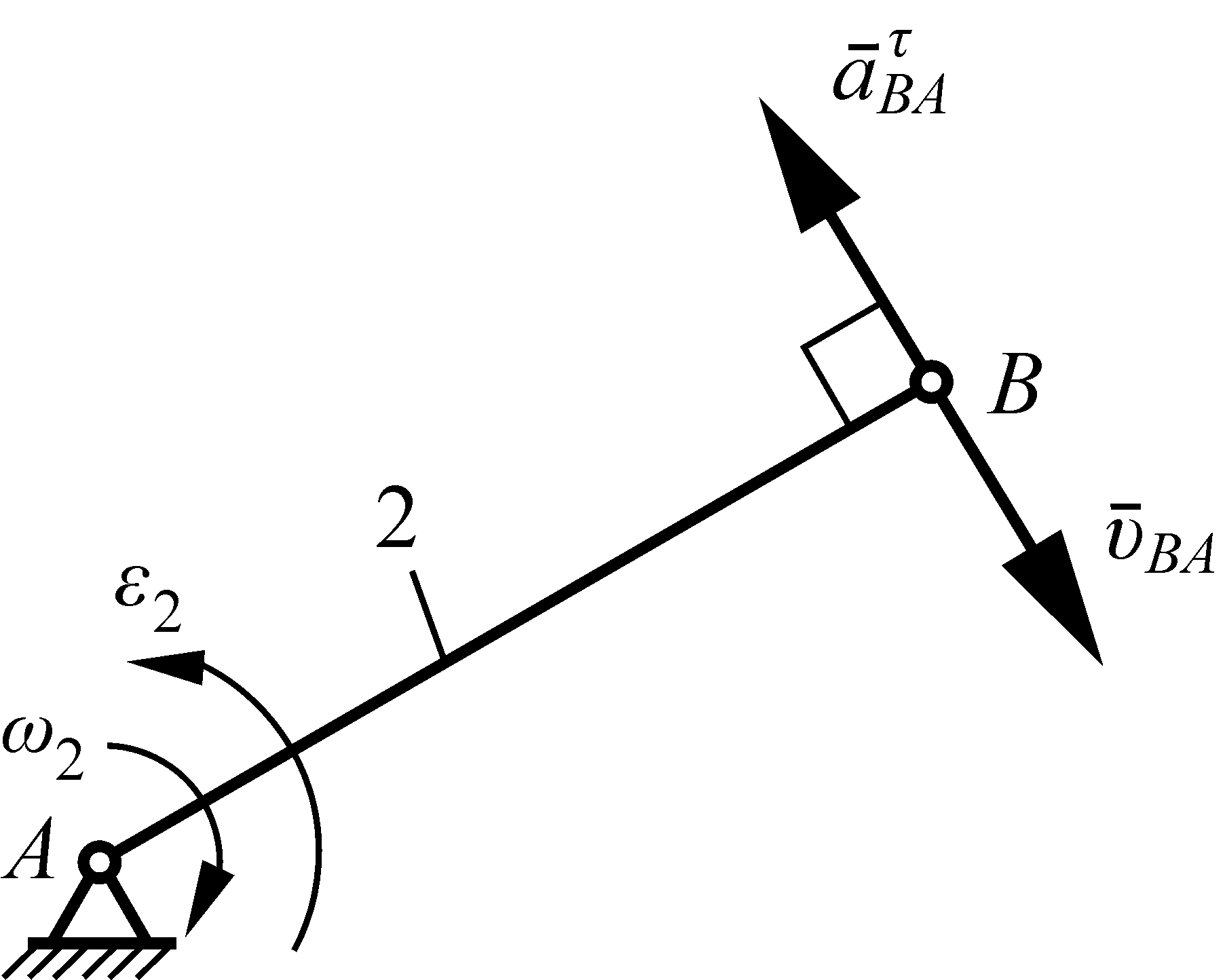
 б
б
Рис. 3.2
для визначення швидкостей центрів мас шатуна S2 і кормисла S3 (рис. 3.1, а) використаємо теорему подібності. На прямій аb відкладаємо відрізок
![]() ,
мм,
,
мм,
а на прямій pb відрізок
![]() ,
мм.
,
мм.
Точку s2 сполучаємо з полюсом р.
Швидкості точок S2 i S3
![]()
Побудовано план швидкостей. Переходимо до плану прискорень.
При наближених розрахунках приймається, що кривошип обертається рівномірно. У цьому випадку прискорення точки А кривошипа дорівнює її нормальному прискоренню, тобто
![]() ,
мс
,
мс![]() .
.
Масштаб прискорень
![]() ,
мс
/мм,
,
мс
/мм,
де а, мм, – відрізок на плані, який зображає прискорення точки А кривошипа. Його довжина вибирається за таким же принципом, як довжина відрізка pа на плані швидкостей.
На площині вибираємо
полюс .
Від полюса
відкладаємо
паралельно ОА,
у напрямі від А
до О
відрізок
![]() (рис. 3.1, в). Оскільки прискорення
точок О,
С,
S1
дорівнюють нулю, то відповідні точки
о,
с,
s1
співпадають з полюсом .
(рис. 3.1, в). Оскільки прискорення
точок О,
С,
S1
дорівнюють нулю, то відповідні точки
о,
с,
s1
співпадають з полюсом .
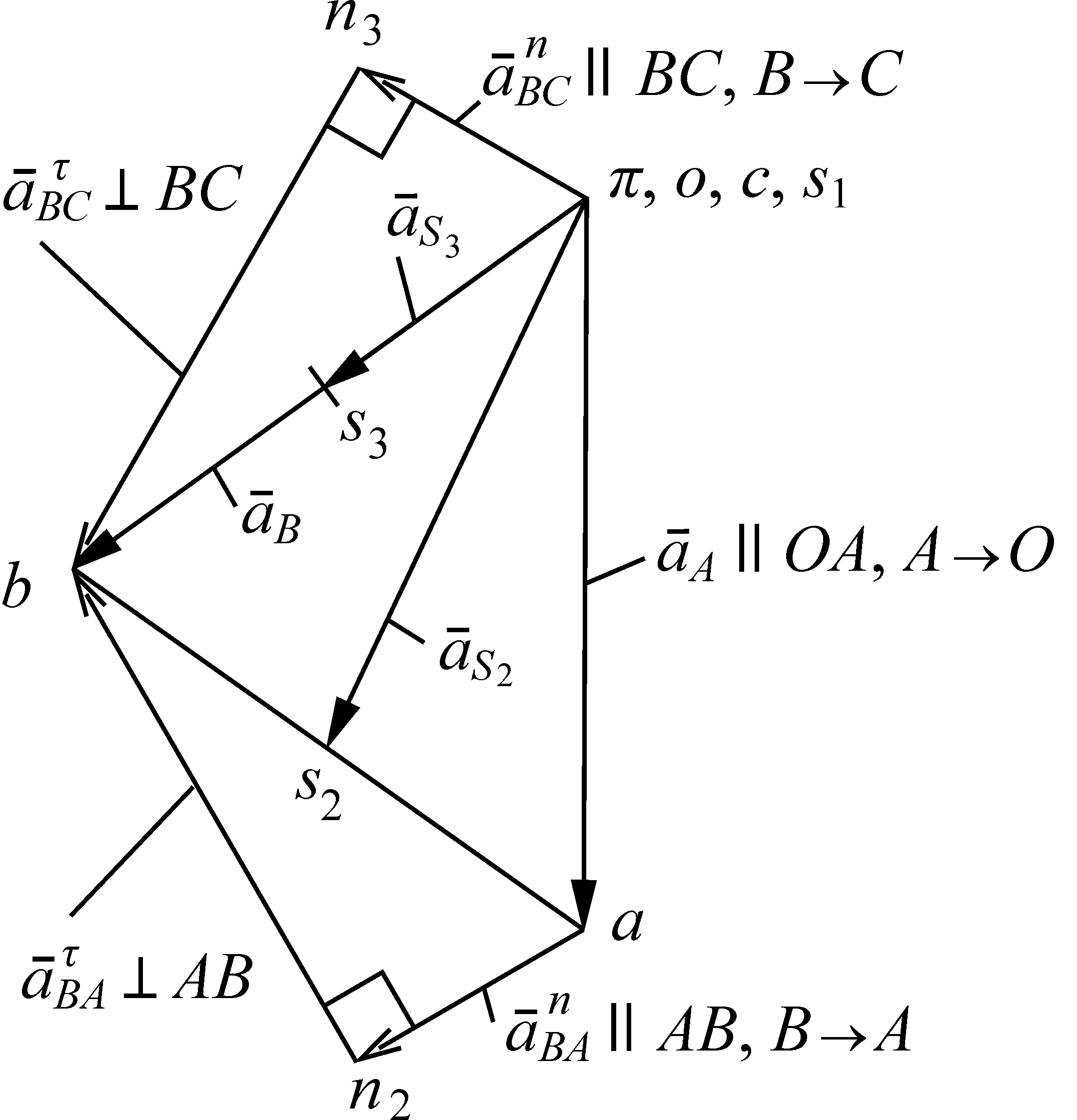
Прискорення точки В визначається у відповідності з системою векторних рівнянь:
![]() ,
,
![]() ;
;
![]()
де
![]() та
та
![]() – нормальні
і тангенціальні прискорення точки В
відносно точок відповідно А
та С.
– нормальні
і тангенціальні прискорення точки В
відносно точок відповідно А
та С.
Останніми написані рівняння у відрізках плану, які зображають відповідні прискорення.
Нормальні прискорення
![]()
зображаються на плані відрізками
![]() ,
мм.
,
мм.
Від точки а
відкладаємо в напрямі від В
до А
відрізок
![]() ,
а від полюса
,
а від полюса
![]() у напрямі від В
до С
відрізок
у напрямі від В
до С
відрізок
![]() (рис. 3.1, в). З точки n2
проводимо
лінію, перпендикулярну АВ,
а з точки
(рис. 3.1, в). З точки n2
проводимо
лінію, перпендикулярну АВ,
а з точки
![]() – перпендикулярну ВС.
На їх перетині знаходимо точку b.
– перпендикулярну ВС.
На їх перетині знаходимо точку b.
Прискорення
![]()
Кутові прискорення ланок 2 і 3
![]() ,
с
.
,
с
.
Визначимо напрями
кутових прискорень. Виділяємо ланку 2
(рис. 3.2, а). Точку В
разом з шатуном 2 рухаємо уявно навколо
нерухомої у відносному русі точки А
в напрямі тангенціального прискорення
![]() .
Ланка 2 буде повертатись для цього
положення проти стрілки годинника.
Одержаний таким чином уявний напрям
обертання співпадає з напрямом
.
Ланка 2 буде повертатись для цього
положення проти стрілки годинника.
Одержаний таким чином уявний напрям
обертання співпадає з напрямом
![]() .
Виділяємо ланку 3 (рис. 3.2, б). Для
визначення напряму
.
Виділяємо ланку 3 (рис. 3.2, б). Для
визначення напряму
![]() точку В
разом з коромислом 3 повертаємо уявно
навколо нерухомої точки С
у напрямі
точку В
разом з коромислом 3 повертаємо уявно
навколо нерухомої точки С
у напрямі
![]() Тоді ланка 3 буде повертатись уявно за
стрілкою годинника, що є напрямом
.
Тоді ланка 3 буде повертатись уявно за
стрілкою годинника, що є напрямом
.
прискорення центрів мас шатуна S2 і кормисла S3 (рис. 3.1, а) визначаємо за теоремою подібності.
На прямій ab відкладаємо відрізок
![]() мм,
мм,
а
на прямій
![]() – відрізок
– відрізок
![]() мм.
мм.
Точку s2 сполучаємо з полюсом π.
Прискорення центрів мас шатуна 2 і коромисла 3
![]()
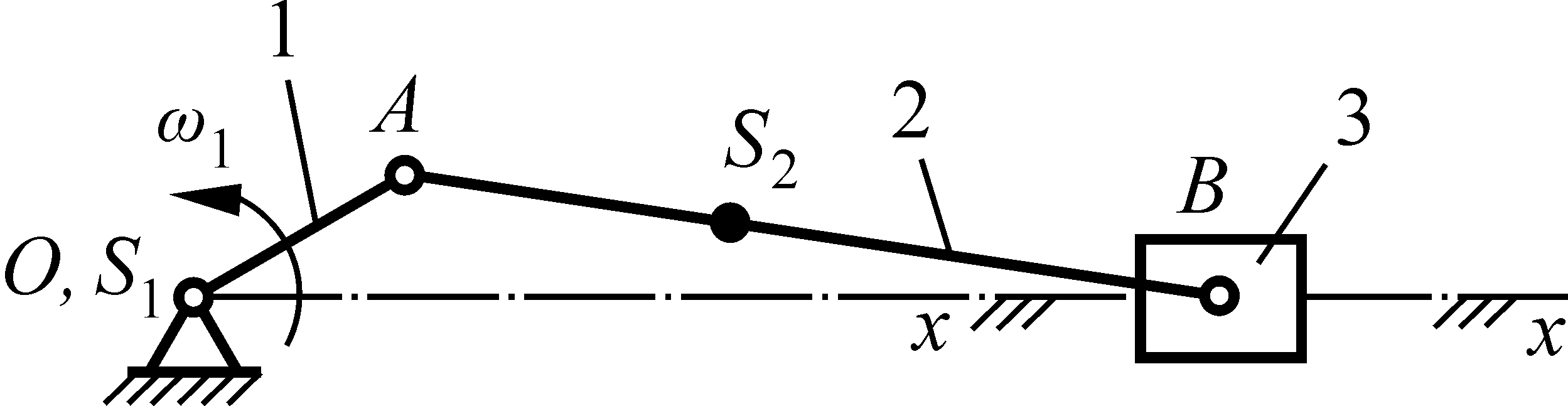
Розглянемо кривошипно-повзунний механізм.
будуємо кінематичну схему механізму (рис. 3.3, а) в масштабі довжин
, м/мм,
де lOA, м, – довжина кривошипа; ОА, мм, – довжина відповідного відрізка на кресленні.
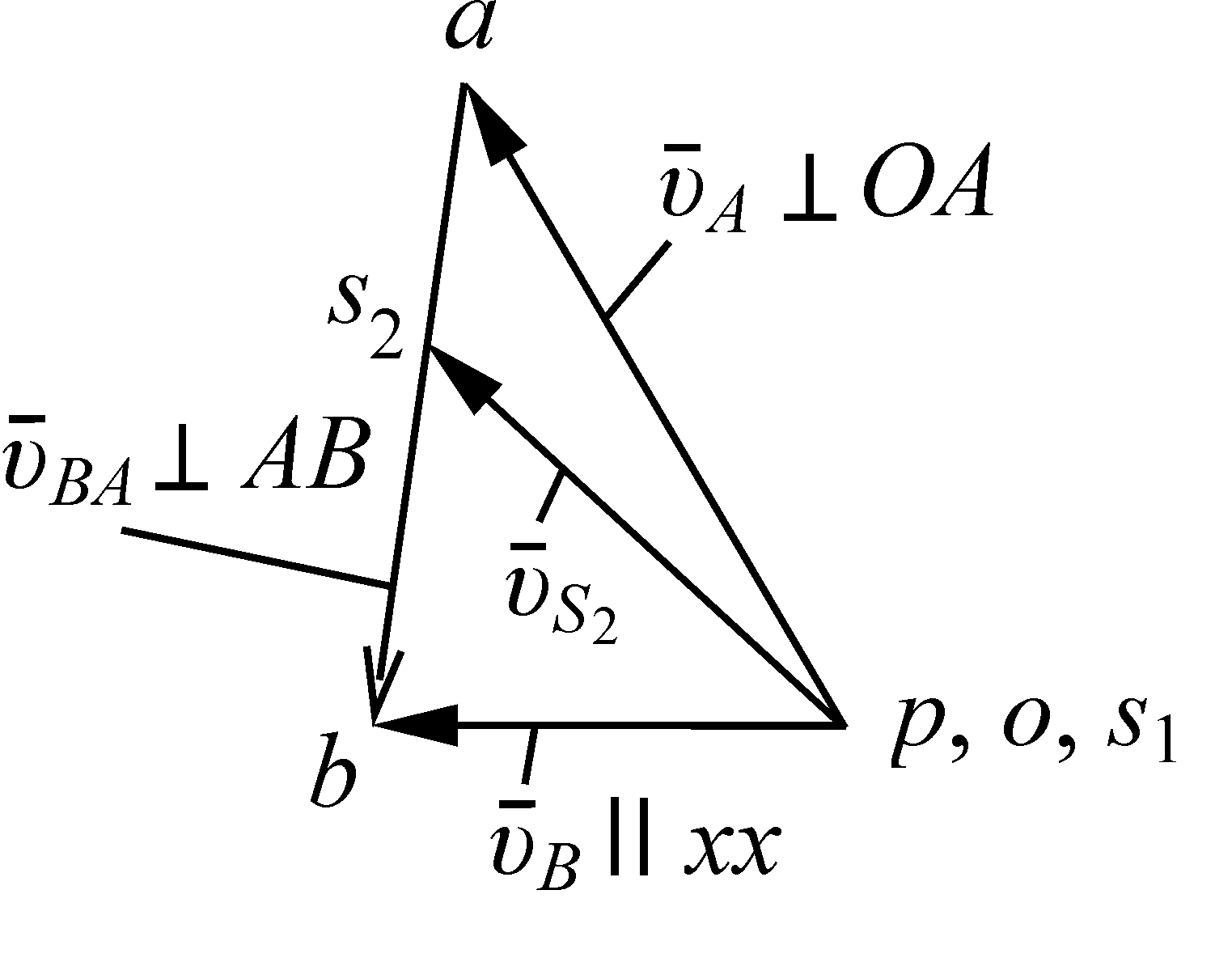
Побудуємо план швидкостей. Швидкість точки А кривошипа
, мс–1.
Масштаб швидкостей
, мс–1/мм.
На площині вибираємо полюс р (рис. 3.3, б). Від полюса р відкладаємо перпендикулярно ОА в бік обертання відрізок , який зображає в масштабі швидкість точки А кривошипа. Швидкості точки О та центра мас S1 кривошипа дорівнюють нулю, тому відповідні точки о, s1 на плані співпадають з полюсом р.
Векторне рівняння для визначення швидкості точки В та відповідне рівняння у відрізках плану
![]()
![]() ,
,
де
![]() – швидкість точки В
відносно А,
перпендикулярна АВ.
Точка В
рухається
вздовж напрямної xx,
тому її швидкість та прискорення
паралельні напрямній.
– швидкість точки В
відносно А,
перпендикулярна АВ.
Точка В
рухається
вздовж напрямної xx,
тому її швидкість та прискорення
паралельні напрямній.
З точки а проводимо перпендикуляр до АВ, а з полюса р – лінію, паралельну xx. На перетині знаходиться точка b (рис. 3.3, б).
Швидкості
![]() .
.
Кутова швидкість шатуна 2
![]() ,
с
,
,
с
,
де lAB , м, – довжина шатуна.
а
б в
г
Рис. 3.3
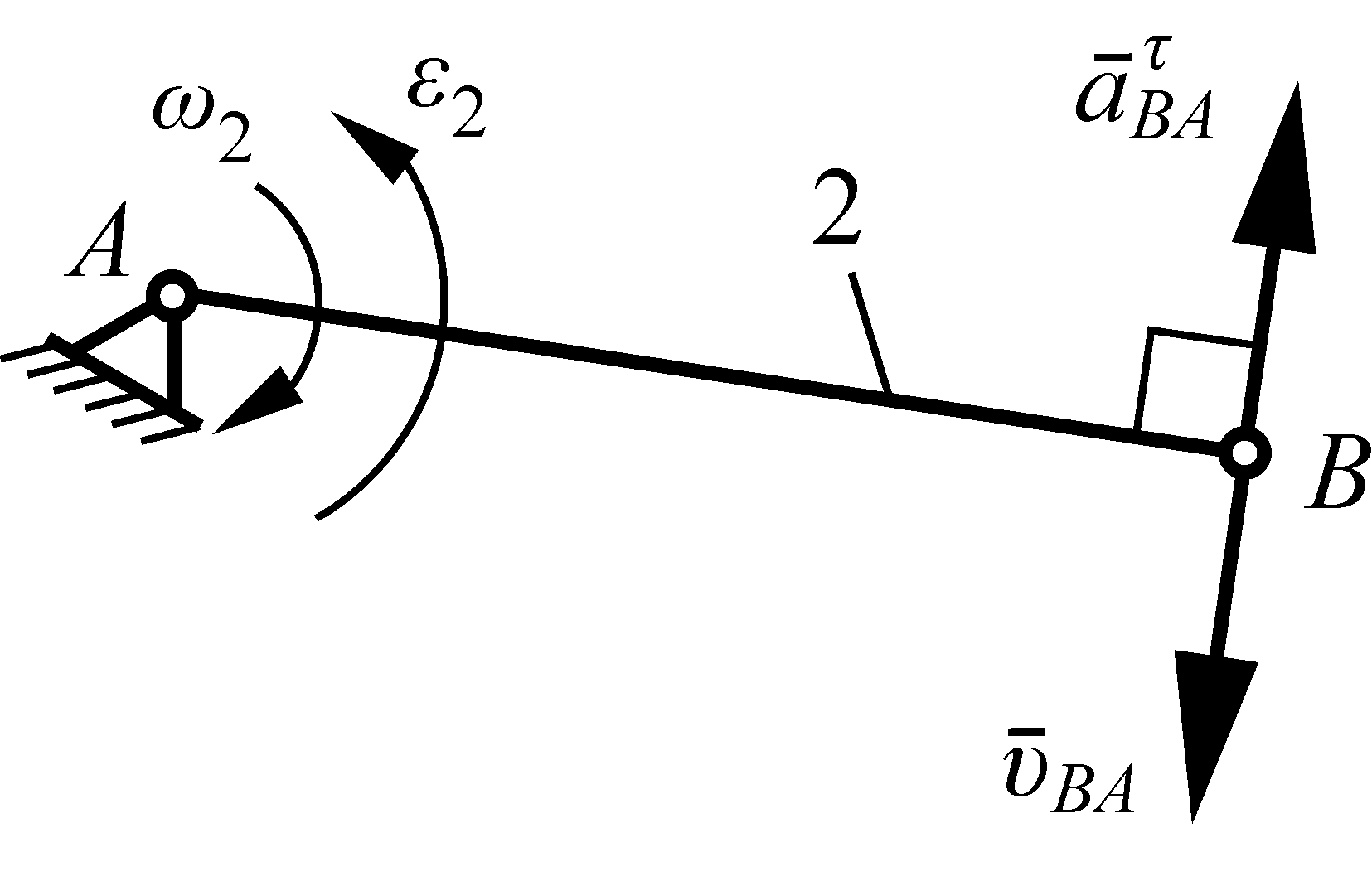
Для визначення
напряму кутової швидкості виділяємо
ланку 2 (рис. 3.3, в). точка
В
разом з ланкою 2 рухається навколо
нерухомої у відносному русі точки А
в напрямі швидкості
.
Тоді для даного положення шатун 2
повертається за стрілкою годинника з
кутовою швидкістю
![]() .
.
для визначення швидкості центра мас шатуна S2 використаємо теорему подібності. На прямій аb відкладаємо відрізок
![]() ,
мм.
,
мм.
Точку s2 сполучаємо з полюсом р.
Швидкість точки S2
![]() .
.
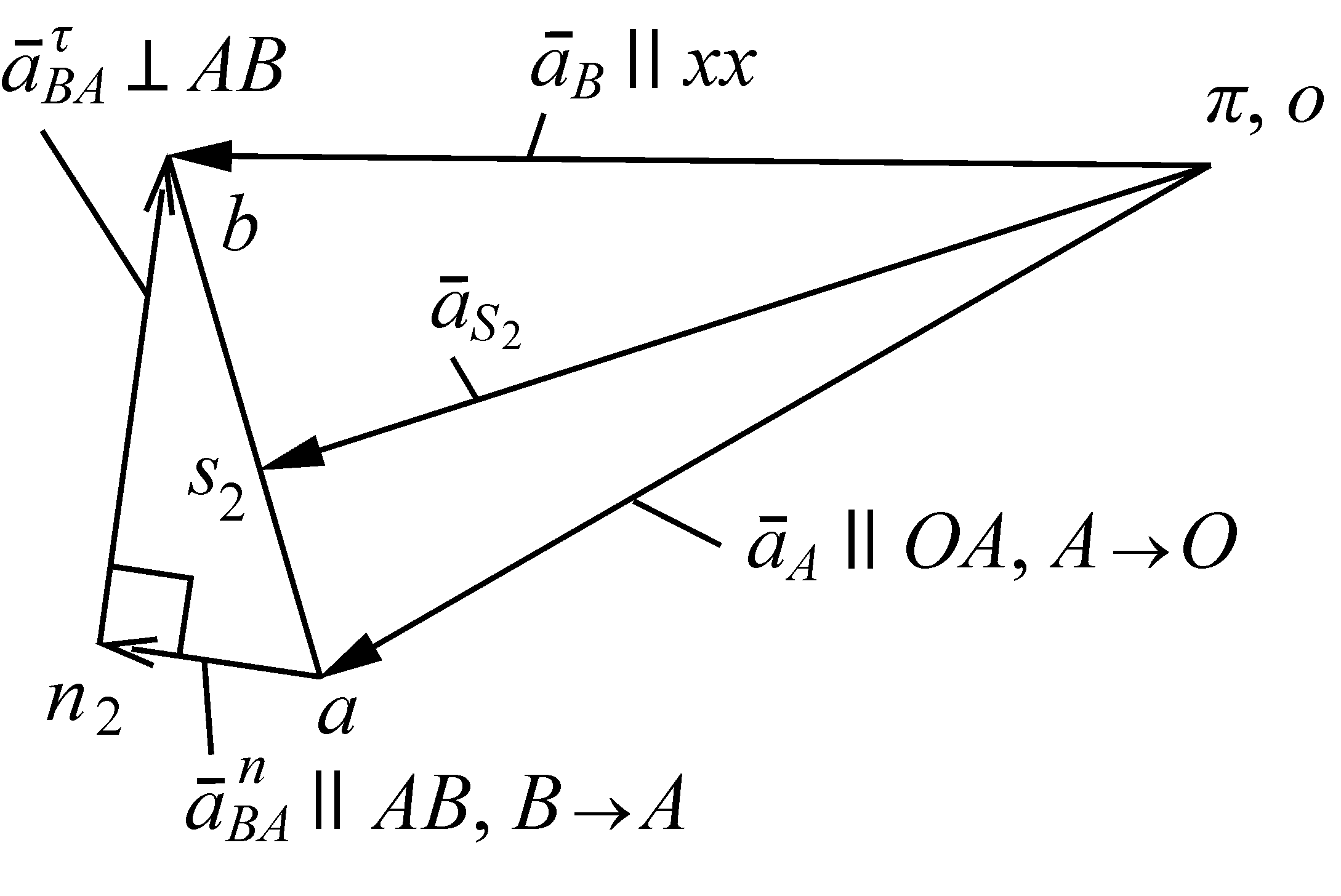
Розглянемо побудову плану прискорень.
прискорення точки А кривошипа
, мс .
Масштаб прискорень
, мс /мм,
де а, мм, – відрізок на плані, який зображає прискорення точки А кривошипа.
На площині вибираємо полюс . Від полюса відкладаємо паралельно ОА, у напрямі від А до О відрізок (рис. 3.3, г). Оскільки прискорення точок О, S1 дорівнюють нулю, то відповідні точки о, s1 співпадають з полюсом .
Для визначення прискорення точки В складаємо векторне та відповідне рівняння у відрізках плану
![]() ,
,
![]()
де
![]() – нормальне і тангенціальне прискорення
точки В
відносно А.
– нормальне і тангенціальне прискорення
точки В
відносно А.
Нормальне прискорення
![]()
зображається на плані відрізком
![]() ,
мм.
,
мм.
від точки а відкладаємо паралельно АВ у напрямі від В до А відрізок (рис. 2.3, в). З точки n2 проводимо лінію, перпендикулярну АВ, а з полюса – паралельну xx. На їх перетині знаходиться точка b.
Прискорення
![]()
Кутове прискорення шатуна 2
![]() .
.
Для визначення напряму кутового прискорення виділяємо ланку 2 (рис. 3.3, в). точку В разом з шатуном 2 повертаємо уявно навколо нерухомої у відносному русі точки А в напрямі тангенціального прискорення . Одержаний для даного положення уявний напрям обертання проти стрілки годинника співпадає з напрямом .
На прямій ab відкладаємо відрізок
.
прискорення центра мас S2 шатуна 2
![]()
Розглянемо побудову планів для кулісного механізму.
кінематичну схему механізму (рис. 3.4, а) будуємо в масштабі довжин
, м/мм,
де lOA, м, – довжина кривошипа; ОА, мм, – довжина відповідного відрізка на кресленні.
Розглянемо побудову плану швидкостей. Швидкість точки А кривошипа
, мс–1.
Масштаб швидкостей
, мс–1/мм.
На площині вибираємо полюс плану р (рис. 3.4, б). Від полюса р відкладаємо перпендикулярно ОА в бік обертання відрізок , який зображає в масштабі швидкість точки А кривошипа. Швидкості точок О, B та центра мас S1 кривошипа дорівнюють нулю, тому відповідні точки о, b, s1 на плані співпадають з полюсом р.
Точка А
кривошипа 1 співпадає для
будь–якого з положень
з фізичною точкою А![]() куліси 3. Тобто розташування точки А
на кулісі залежить від положення
механізму.
куліси 3. Тобто розташування точки А
на кулісі залежить від положення
механізму.
Швидкість точки А знаходимо згідно векторного рівняння
![]()
![]()
де
![]() – швидкість точки А
відносно А,
паралельна А
В.
Швидкість точки А
,
яка належить кулісі, перпендикулярна
до неї. останнім
записане відповідне векторне рівняння
у відрізках плану.
– швидкість точки А
відносно А,
паралельна А
В.
Швидкість точки А
,
яка належить кулісі, перпендикулярна
до неї. останнім
записане відповідне векторне рівняння
у відрізках плану.
З точки а
плану проводимо лінію, паралельну А
В,
а з полюса
![]() – лінію, перпендикулярну А
В.
на перетині
знаходимо точку а
.
– лінію, перпендикулярну А
В.
на перетині
знаходимо точку а
.
Швидкості
![]() .
.
Кутова швидкість куліси 3
![]()
де
l![]() , м, –
відстань між точками А
і В.
, м, –
відстань між точками А
і В.
визначимо
напрям кутової швидкості. виділяємо
ланку 3 (рис. 3.4, в). точка
А
разом з кулісою 3 рухається навколо
нерухомої точки В
у
напрямі
![]() .
Тоді куліса повертається для даного
положення за стрілкою годинника з
кутовою швидкістю
.
Тоді куліса повертається для даного
положення за стрілкою годинника з
кутовою швидкістю
![]() .
.
На прямій pа3 відкладаємо відрізок
![]() ,
мм.
,
мм.
Точку s3 сполучаємо з полюсом р.
Швидкість точки S3
![]() .
.
а |
б
в |
г |
|
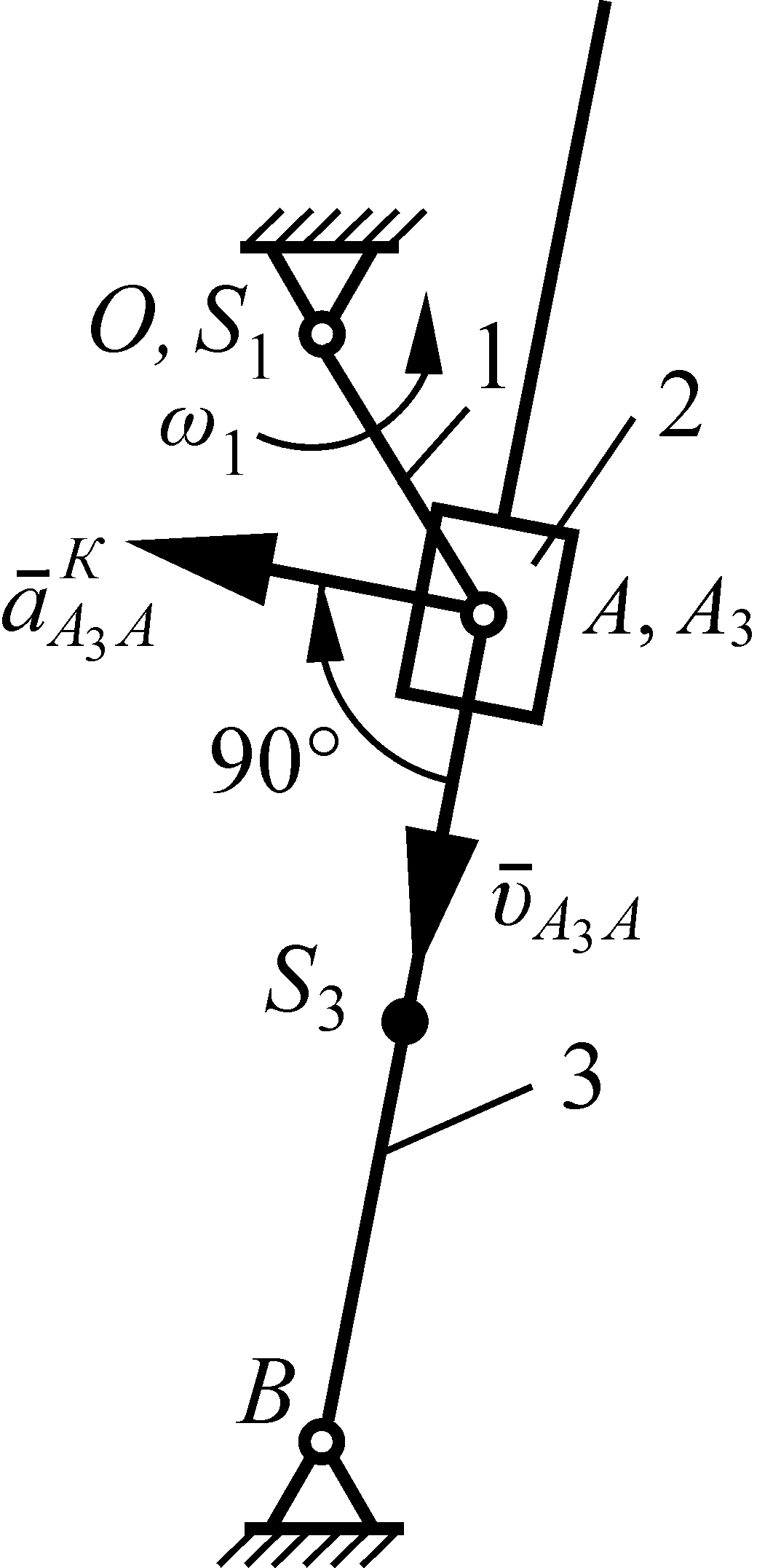
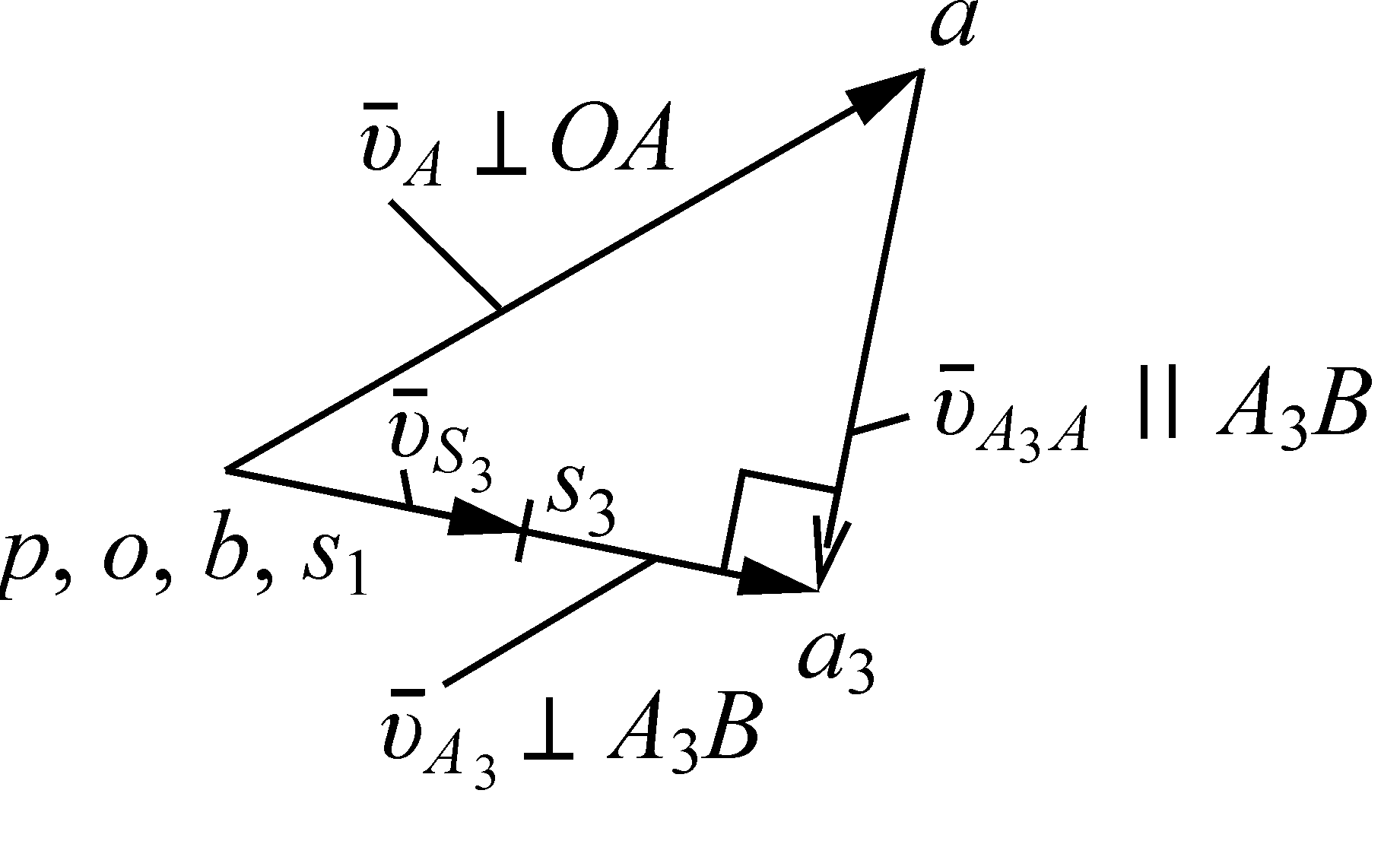
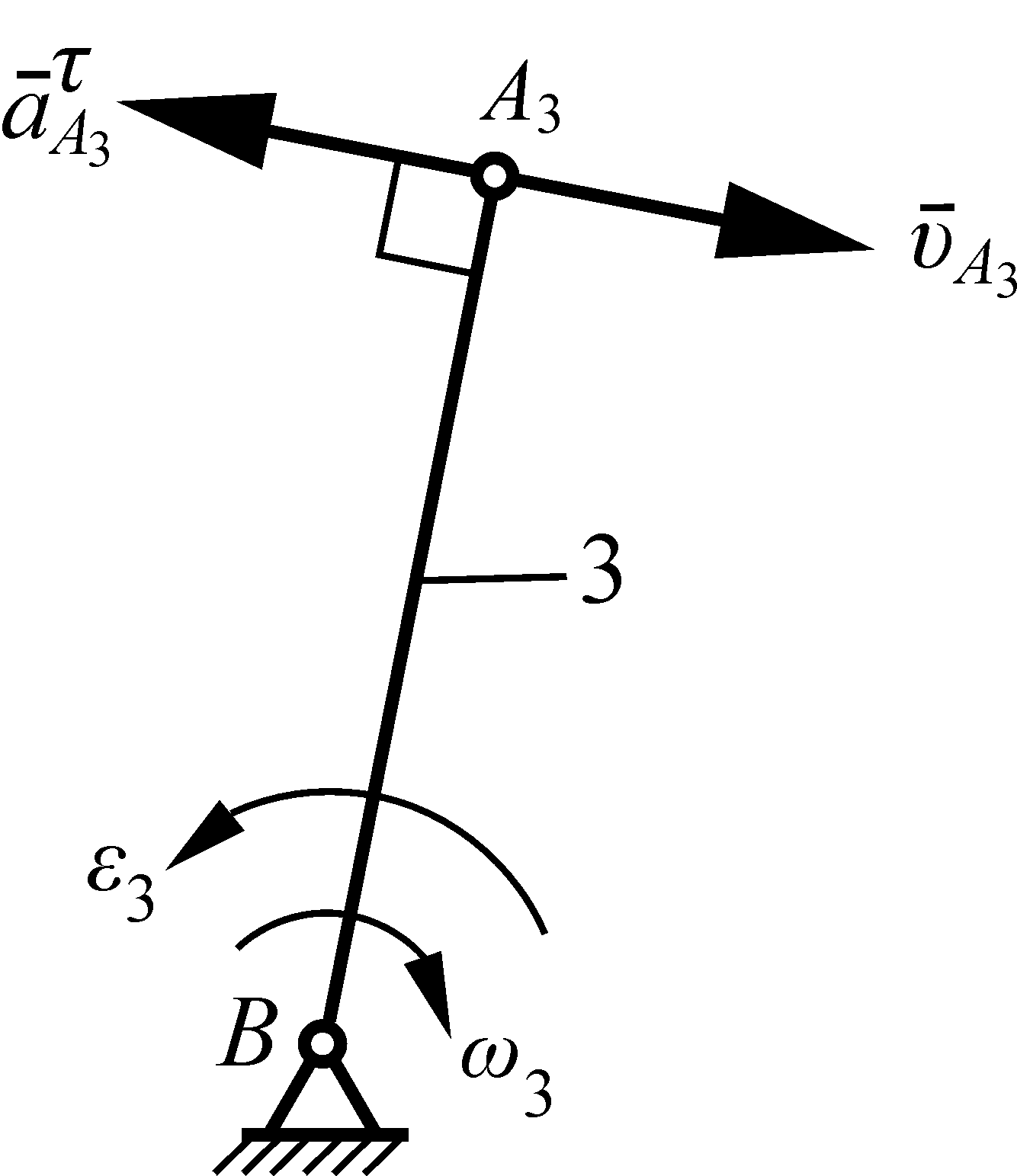
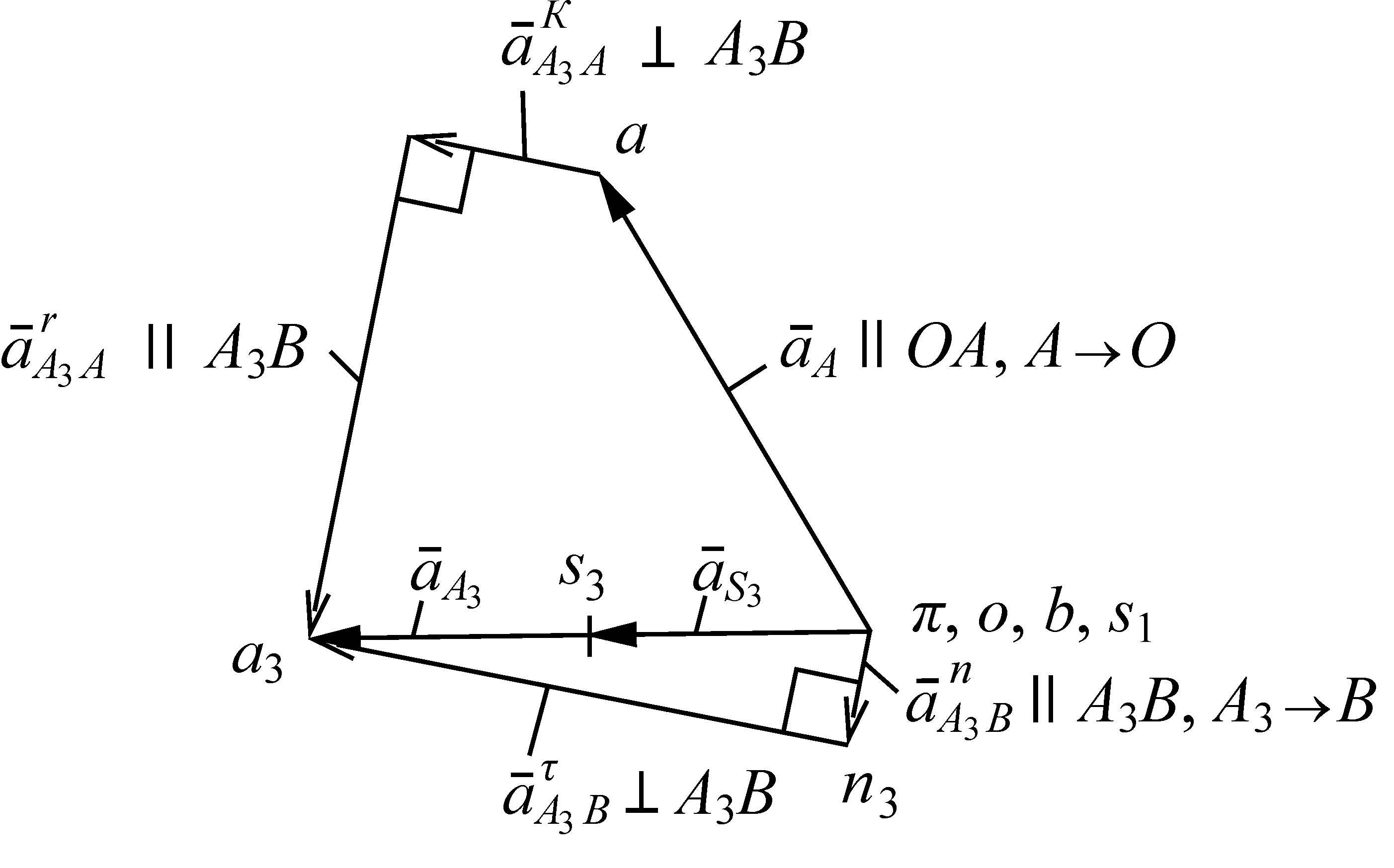
Рис. 3.4
Переходимо до побудови плану прискорень.
прискорення точки А кривошипа
, мс .
Масштаб прискорень
, мс /мм,
де а, мм, – відрізок на плані, який зображає прискорення точки А кривошипа.
На площині вибираємо полюс . Від полюса відкладаємо паралельно ОА, у напрямі від А до О відрізок (рис. 3.4, г). Оскільки прискорення точок О, B та центра мас S1 кривошипа дорівнюють нулю, то відповідні точки о, b, s1 співпадають з полюсом .
Система векторних рівнянь та відповідна система у відрізках плану для визначення прискорення точки А запишеться
![]() ,
,
![]() ;
;
![]()
де
![]() – прискорення Коріоліса та відносне
точки А
відносно А;
– прискорення Коріоліса та відносне
точки А
відносно А;
![]() – нормальне і тангенціальне прискорення
точки А
відносно В.
– нормальне і тангенціальне прискорення
точки А
відносно В.
Напрям прискорення Коріоліса визначається поворотом вектора на 90 у бік обертання куліси (рис. 3.4, а).
прискорення Коріоліса
![]()
зображається на плані відрізком
![]() , мм.
, мм.
Нормальне прискорення
![]()
зображається відрізком
![]() ,
мм.
,
мм.
Від точки а
відкладаємо перпендикулярно А
В
у напрямі прискорення Коріоліса відрізок
![]() ,
а від полюса
паралельно А
В
у напрямі від А
до В
відрізок
(рис. 3.4, г). З точки k
проводимо лінію, паралельну А
В,
а з точки
– перпендикулярну А
В.
На їх перетині знаходимо точку а
.
,
а від полюса
паралельно А
В
у напрямі від А
до В
відрізок
(рис. 3.4, г). З точки k
проводимо лінію, паралельну А
В,
а з точки
– перпендикулярну А
В.
На їх перетині знаходимо точку а
.
Прискорення
![]()
Кутове прискорення куліси 3
![]() .
.
Для визначення
напряму кутового прискорення куліси
виділяємо ланку 3 (рис. 3.4, в).
Повертаємо точку А
разом з кулісою 3 уявно навколо нерухомої
точки В
у напрямі тангенціального прискорення
![]() .
одержуємо
уявний напрям обертання проти стрілки
годинника, який співпадає з напрямом
кутового прискорення
.
.
одержуємо
уявний напрям обертання проти стрілки
годинника, який співпадає з напрямом
кутового прискорення
.
відкладаючи
на прямій
![]() відрізок
відрізок
![]() ,
,
знаходимо прискорення центра мас куліси 3
![]()