Розділ 6. Модуль 5. Синтез планетарних передач
6.1. Синтез планетарних механізмів
Широке застосування
знайшли планетарні передачі середньої
та великої потужності, виконані по
схемах на рис. 6.1, а, б
при високому к.к.д. (0,96...0,98). У однорядному
механізмі (рис. 6.1, а) передаточне
відношення
![]() приймає значення 3...8, а в дворядному
(рис. 6.1, б) – до 15.
приймає значення 3...8, а в дворядному
(рис. 6.1, б) – до 15.
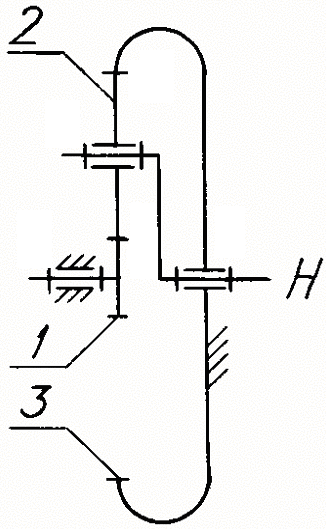
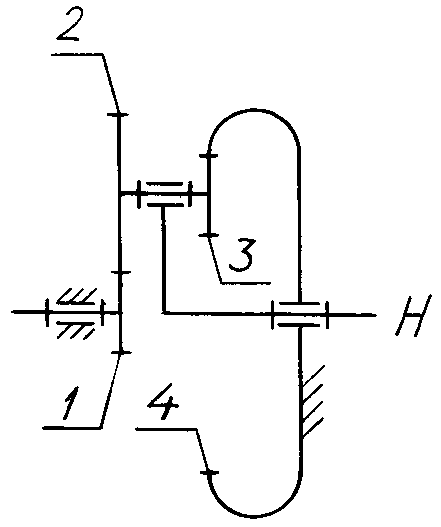
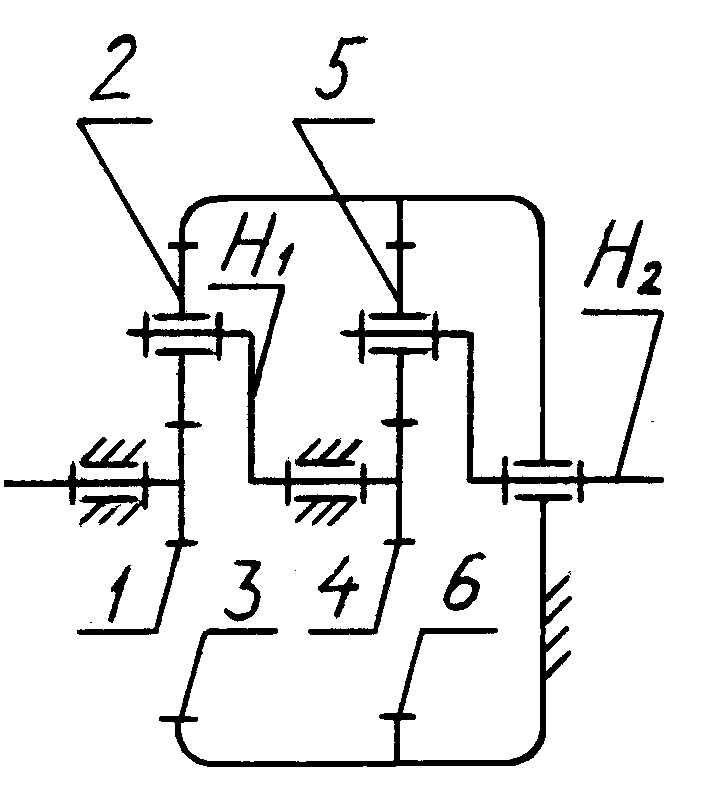
а б в
Рис. 6.1
Для забезпечення великих передаточних відношень використовуються послідовні з'єднання найпростіших планетарних механізмів, як, наприклад, у схемі на рис. 6.1, в.
Розглянемо
методику
підбору чисел зубів
для трьох наведених схем силових
планетарних механізмів. Вважаємо, що
колеса нульові з коефіцієнтом висоти
головки зуба
![]() 1,0.
1,0.
приймаємо,
що дійсне передаточне відношення
відхиляється від заданого
![]() з відносною похибкою [15]
з відносною похибкою [15]
![]() =1
–
=1
–
![]()
![]() 1...4 %. (6.1)
1...4 %. (6.1)
Число зубів
![]() – того колеса позначимо через
– того колеса позначимо через
![]() 1,
2, ...
1,
2, ...
розглянемо однорядну передачу (рис. 6.1, а). її дійсне передаточне відношення
![]() . (6.2)
. (6.2)
Передача повинна задовольняти умовам співвісності
![]() (6.3)
(6.3)
сусідства
![]() , (6.4)
, (6.4)
складання
![]() , (6.5)
, (6.5)
відсутності підрізання та заклинювання зубів
![]() 17,
17,
![]() 20,
20,
![]() 85. (6.6)
85. (6.6)
Тут С – довільне ціле число; k – кількість сателітів. у машинобудуванні найчастіше приймають k = 3 … 6.
Для спрощення
підбору використовуємо таблиці 6.1 ...
6.4 [12].
У них наведені значення передаточного
відношення
для кількості сателітів відповідно k
= 6, 5, 4, 3, чисел зубів
![]() і суми
і суми
![]() ,
при яких умови (6.3)
... (6.6) виконуються.
,
при яких умови (6.3)
... (6.6) виконуються.
розглянемо передачу, складену з двох однорядних планетарних механізмів (рис. 6.1, в).
У багатоступінчастих планетарних передачах розбиття передаточного відношення по ступенях проводять виходячи з ряду умов: мінімальних габаритів, технологічності конструкції, мінімального кутового зазору вихідного вала [18].
Таблиця 6.1
k = 6 |
|||||
z3 |
z1+z3 |
||||
120 |
126 |
132 |
138 |
144 |
|
85 |
3.43 |
3.07 |
– |
– |
– |
86 |
3.53 |
3.15 |
2.87 |
– |
– |
87 |
3.64 |
3.23 |
2.93 |
– |
– |
88 |
– |
3.32 |
3 |
– |
– |
89 |
– |
3.41 |
3.07 |
2.82 |
– |
90 |
– |
3.5 |
3.14 |
2.88 |
– |
91 |
– |
3.6 |
3.22 |
2.94 |
– |
92 |
– |
3.71 |
3.3 |
3 |
2.77 |
93 |
– |
– |
3.38 |
3.07 |
2.82 |
94 |
– |
– |
3.47 |
3.14 |
2.88 |
95 |
– |
– |
3.57 |
3.21 |
2.94 |
96 |
– |
– |
3.67 |
3.29 |
3 |
97 |
– |
– |
– |
3.37 |
3.06 |
98 |
– |
– |
– |
3.45 |
3.13 |
99 |
– |
– |
– |
3.54 |
3.2 |
100 |
– |
– |
– |
3.63 |
3.27 |
101 |
– |
– |
– |
3.73 |
3.35 |
102 |
– |
– |
– |
– |
3.43 |
103 |
– |
– |
– |
– |
3.51 |
104 |
– |
– |
– |
– |
3.6 |
105 |
– |
– |
– |
– |
3.69 |
Таблиця 6.2
k = 5 |
||||||||
z1+z3 |
z3 |
u1H |
z1+z3 |
z3 |
u1H |
z1+z3 |
z3 |
u1H |
110 |
85 |
4.4 |
130 |
96 |
3.82 |
140 |
103 |
3.78 |
120 |
88 |
3.75 |
97 |
3.94 |
104 |
3.89 |
||
89 |
3.87 |
98 |
4.06 |
105 |
4 |
|||
90 |
4 |
99 |
4.19 |
106 |
4.12 |
|||
91 |
4.14 |
100 |
4.33 |
107 |
4.24 |
|||
92 |
4.29 |
101 |
4.48 |
108 |
4.38 |
|||
93 |
4.44 |
– |
– |
109 |
4.52 |
|||
Таблиця 6.3
k = 4 |
||||||
z3 |
z1+z3 |
|||||
104 |
108 |
112 |
116 |
120 |
124 |
|
85 |
5.47 |
4.7 |
– |
– |
– |
– |
86 |
5.78 |
4.91 |
– |
– |
– |
– |
87 |
– |
5.14 |
– |
– |
– |
– |
88 |
– |
5.4 |
4.67 |
– |
– |
– |
89 |
– |
5.68 |
4.87 |
– |
– |
– |
90 |
– |
6 |
5.09 |
– |
– |
– |
91 |
– |
– |
5.33 |
4.64 |
– |
– |
92 |
– |
– |
5.6 |
4.83 |
– |
– |
93 |
– |
– |
5.89 |
5.04 |
– |
– |
94 |
– |
– |
– |
5.27 |
4.62 |
– |
95 |
– |
– |
– |
5.52 |
4.8 |
– |
96 |
– |
– |
– |
5.8 |
5 |
– |
97 |
– |
– |
– |
6.11 |
5.22 |
4.59 |
98 |
– |
– |
– |
– |
5.45 |
4.77 |
99 |
– |
– |
– |
– |
5.71 |
4.96 |
100 |
– |
– |
– |
– |
6 |
5.17 |
101 |
– |
– |
– |
– |
– |
5.39 |
102 |
– |
– |
– |
– |
– |
5.64 |
103 |
– |
– |
– |
– |
– |
5.9 |
Таблиця 6.4
k = 3 |
|||||||||
z1+z3 |
z3 |
u1H |
z1+z3 |
z3 |
u1H |
z1+z3 |
z3 |
u1H |
|
108 |
91 |
6.35 |
132 |
111 |
6.29 |
144 |
122 |
6.55 |
|
114 |
96 |
6.33 |
112 |
6.6 |
123 |
6.86 |
|||
97 |
6.71 |
113 |
6.95 |
124 |
7.2 |
||||
120 |
101 |
6.32 |
114 |
7.33 |
125 |
7.58 |
|||
102 |
6.67 |
115 |
7.76 |
126 |
8 |
||||
103 |
7.06 |
138 |
116 |
6.27 |
127 |
8.47 |
|||
126 |
106 |
6.3 |
117 |
6.57 |
|
||||
107 |
6.63 |
118 |
6.9 |
|
|||||
108 |
7 |
119 |
7.26 |
|
|||||
109 |
7.41 |
120 |
7.67 |
|
|||||
– |
– |
121 |
8.12 |
|
|||||
Щоб одержати мінімальні габарити та зменшити частоту обертання сателітів першого (швидкісного) ступеня, його передаточне відношення призначають по можливості більшим.
По технологічним міркуванням рекомендується проектувати багатоступінчасті передачі з можливо більшим числом ступенів, які мають колеса з однаковими модулем та однаковими числами зубів. Умова рівноміцності зачеплень різних ступенів досягається при цьому зміною ширини коліс.
Для зменшення кутового зазору веденого вала (можливий кут повороту його при нерухомому ведучому валі за рахунок вибірки зазорів у зачепленні) призначають на швидкісному ступені можливо більше передаточне відношення.
Тут будемо виходити з технологічних міркувань, приймаючи однорядні механізми однаковими по модулю та числам зубів.
для дворядної передачі з одним зовнішнім зачепленням (рис. 6.1, б) передаточне відношення
![]() . (6.7)
. (6.7)
Вона повинна задовольняти умовам співвісності
![]() , (6.8)
, (6.8)
сусідства
,
![]() , (6.9)
, (6.9)
складання
![]() , (6.10)
, (6.10)
відсутності підрізання та заклинювання зубів
17,
17,
20,
![]() 85. (6.11)
85. (6.11)
де
С
– довільне ціле число; k
– кількість сателітів; l
– загальний
спільний дільник чисел зубів сателітів
![]() і
і
![]() [10, 11].
[10, 11].
Радіальний габарит передачі при сталому модулі пропорціональний сумі G = z1 + 2 z2 + 2.
У таблиці 6.5 [12] наведені зростаючі значення передаточних відношень u1H, в залежності від чисел зубів і сателітів при невеликих значеннях суми G. У ній числа зубів центральних коліс z1 і z4 прийняті кратними числу сателітів k, що спрощує збирання механізму [8].
Наводимо приклади табличного вибору чисел зубів планетарних механізмів.
1. однорядна передача (рис. 6.1, а). Тут і далі перевірочні розрахунки виконуються в середовищі Mathcad. (розрахунки можуть проводитись також вручну).
Вводимо в програму
розрахунків значення заданого
передаточного відношення
![]() .
По табл. 6.1...6.4 шукаємо значення
передаточного відношення
близьке до заданого
так, щоб кількість сателітів k
була по можливості найбільшою, а число
зубів
.
По табл. 6.1...6.4 шукаємо значення
передаточного відношення
близьке до заданого
так, щоб кількість сателітів k
була по можливості найбільшою, а число
зубів
![]() – найменшим
[8]. Вводимо
табличні значення k,
та суми
– найменшим
[8]. Вводимо
табличні значення k,
та суми
![]() .
Визначаємо число зубів
.
Визначаємо число зубів
![]() .
.
З умови співвісності (6.3) знаходимо кількість зубів
![]()
Таблиця 6.5
k |
z1 |
z2 |
z3 |
z4 |
u1H |
G |
6 |
42 |
28 |
20 |
90 |
4 |
100 |
42 |
31 |
23 |
96 |
4.08 |
106 |
|
42 |
32 |
22 |
96 |
4.32 |
108 |
|
42 |
33 |
21 |
96 |
4.59 |
110 |
|
42 |
34 |
20 |
96 |
4.89 |
112 |
|
5 |
30 |
32 |
23 |
85 |
4.94 |
96 |
30 |
33 |
22 |
85 |
5.25 |
98 |
|
30 |
34 |
21 |
85 |
5.59 |
100 |
|
30 |
35 |
20 |
85 |
5.96 |
102 |
|
4 |
24 |
38 |
26 |
88 |
6.36 |
102 |
24 |
39 |
25 |
88 |
6.72 |
104 |
|
24 |
40 |
24 |
88 |
7.11 |
106 |
|
24 |
41 |
23 |
88 |
7.54 |
108 |
|
24 |
42 |
22 |
88 |
8 |
110 |
|
24 |
43 |
21 |
88 |
8.51 |
112 |
|
24 |
44 |
20 |
88 |
9.07 |
114 |
|
24 |
47 |
21 |
92 |
9.58 |
120 |
|
24 |
48 |
20 |
92 |
10.2 |
122 |
|
3 |
18 |
46 |
23 |
87 |
10.67 |
112 |
18 |
47 |
22 |
87 |
11.33 |
114 |
|
18 |
48 |
21 |
87 |
12.05 |
116 |
|
18 |
49 |
20 |
87 |
12.84 |
118 |
|
18 |
51 |
21 |
90 |
13.14 |
122 |
|
18 |
52 |
20 |
90 |
14 |
124 |
|
18 |
54 |
21 |
93 |
14.29 |
128 |
|
18 |
55 |
20 |
93 |
15.21 |
130 |
За формулою (6.2) визначаємо уточнене значення дійсного передаточного відношення, а за формулою (6.1) – його відносну похибку, яку порівнюємо з припустимою.
Перевіряємо умови сусідства (6.4), складання (6.5), відсутності підрізання та заклинювання зубів (6.6). Програма розрахунків у середовищі Mathcad: