

ФОТОГРАММЕТРИЯ
.pdfvk.com/club152685050 | vk.com/id446425943
ориентирования и направляющими косинусами разных систем ЭВО:
tg |
a3 |
tg cos t, |
sin b |
sin sin t, |
||||
|
|
|||||||
|
|
c3 |
|
|
3 |
|
||
|
|
|
|
|
|
|
||
tg |
b1 |
|
cos tg k tg t 1 |
|
|
|||
|
|
|
||||||
b |
|
tg k cos tg t |
|
|
|
|||
2 |
|
|
|
|
|
|
||
Можно было бы привести и еще ряд соотношений.
Переход от пространственных координат к плоским осуществляется по формулам:
x |
a |
|
|
|
1 |
y |
a2 |
|
|
|
|
z |
a3 |
|
b1 b2 b3
c |
|
X |
|
1 |
|
|
|
c2 |
Y |
AT |
|
c3 |
|
|
|
Z |
|
||
|
X |
|
|
|
|
Y |
(20) |
|
|
|
|
Z |
|
|
где АТ – транспонированная матрица А.
Если начало координат снимка не совпадает с его главной точкой, то вместо координат x и y в формулах 14,15,16 и 20 следует использовать разности
x – xо и y - yо.
Формулы (14) – (20) справедливы для любых значений угловых элементов внешнего ориентирования снимка.
Для плановых снимков, когда α, ω и малы, с точностью до членов второго порядка малости можно записать:
a1 |
1 |
2 |
|
|
2 |
, |
|
|
a2 , |
a3 , |
|
|
|
||||||||
2 |
|
|
2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
b1 b2 |
1 |
2 |
|
2 |
b3 , |
|
|
|
|
||||||||||||
|
|
|
|
|
, |
|
|
|
|
||||||||||||
|
|
2 |
|
2 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
с , |
|
|
|
|
|
, |
|
|
1 |
2 |
|
2 |
|||||||||
|
|
c |
2 |
c |
3 |
|
|
, |
|||||||||||||
|
|
|
|
||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Если же учитывать только члены первого порядка малости, то:
X x y z , Y y x z , Z z x y .
(21)
(22)
Для случая, изображенного на рис. 29 матрица A будет единичной, то
есть:
a1 b2 c3 1, |
a2 a3 b1 b3 c1 c2 0 , |
(23) |
Полученные зависимости между системами координат X' Y' Z' и x y z используются в аналитических способах определения координат точек местности по измерениям снимков.
3.4. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
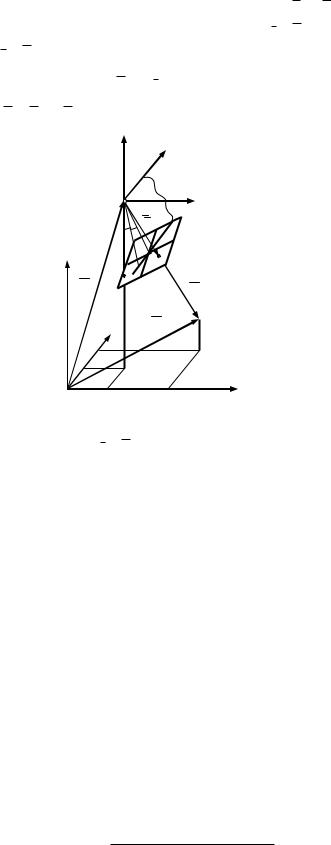
Точка местности М и её изображение на снимке т находятся на одном проектирующем луче (рис.31). Положение точек S и М в системе координат
51
vk.com/club152685050 | vk.com/id446425943
местности X Y Z определяется векторами соответственно RS точек т и М в системе координат S X' Y' Z' – векторами r и R .
Векторы r и R коллинеарны, поэтому
R r ,
где λ – скаляр, а R RM RS .
и RM , а положение
(24)
Z' |
Y' |
|
|
S |
X' |
|
ωrr y
α x
x
Z |
|
m |
|
|
|
|
|
|
|
|
|
RS |
n |
|
|
|
|
|
|
|
|
R |
|
|
ZS |
R |
|
|
M |
Y |
M |
|
Z |
||
|
|
|
|||
|
|
|
|
X |
|
|
|
|
|
|
|
XS |
YS |
|
|
Y |
X |
|
|
|
|||
|
|
|
|
||
Рис.31. Схемы связи координат точки местности и снимка
Спроектируем векторы r и R на координатные оси X, Y, Z, тогда:
R |
|
|
r |
|
|
|
X |
X |
|
||
RY |
|
rY |
|
(25) |
|
|
|
|
|
|
|
RZ |
rZ |
|
|||
Из третьего равенства (25) найдем λ и подставим его выражение в первое и второе. Тогда:
|
|
R |
|
R |
|
rX |
, |
|
R |
R |
rY |
. |
|
|
|
|
|
(26) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
X |
|
Z |
rZ |
|
Y |
Z rZ |
|
|
|
|
|
|
|||||
Так как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RX X X S , |
|
RY Y YS , |
RZ Z ZS , |
|
||||||||||||||||
rX X , |
|
|
|
|
|
rY |
Y , |
|
|
rZ Z , |
|
|
||||||||
то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X X |
|
(Z Z |
|
) |
|
X |
, |
Y Y |
(Z Z |
|
) |
Y |
, |
(27) |
||||||
|
|
|
Z |
|
Z |
|||||||||||||||
|
S |
|
|
|
S |
|
|
|
|
S |
|
|
|
S |
|
|
|
|||
Или, с учётом равенства (15)
X X S (Z ZS ) a1(x x0 ) a2 ( y y0 ) a3 z , c1(x x0 ) c2 ( y y0 ) c3 z
Y Y |
(Z Z |
|
) |
b1 |
(x x0 ) b2 |
( y y0 ) b3 z |
. |
(28) |
|||
|
|
|
|
|
|||||||
S |
|
S |
|
c (x x ) c ( y y |
0 |
) c z |
|
||||
|
|
|
1 |
0 |
2 |
|
3 |
|
|
||
52

vk.com/club152685050 | vk.com/id446425943
Итак, если элементы ориентирования снимка даны, то два уравнения (27) имеют три неизвестных. Отсюда следует, что пространственные координаты точки местности по одиночному снимку не определить. Можно получить лишь
ееплановое положение. Но надо знать высоту фотографирования H = - (Z – ZS).
Вфотограмметрии часто используются обратные зависимости (между координатами точки снимка и координатами соответствующей точки
местности). Для их получения, спроектируем векторы R и r равенства (24) на координатные оси системы координат S x y z (рис. 31), в результате получим:
|
R |
|
|
r |
|
|
|
|||
|
|
|
x |
|
|
x |
|
|
|
|
|
Ry |
|
ry . |
|
|
(29) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
Rz |
|
rz |
|
|
|
||||
Решим третье уравнение относительно λ и подставим его значение в |
||||||||||
первое и второе уравнения. Тогда: |
|
|
|
|
|
|
|
|||
|
r |
R |
|
|
|
r |
Ry |
|
|
|
r |
|
x |
, |
r |
|
. |
(30) |
|||
|
|
|
||||||||
x |
z |
Rz |
|
|
y |
z Rz |
|
|
||
Матрицы-столбцы равенств (29) можно представить в виде:
r |
|
x x |
|
|
|
x |
|
0 |
|
|
|
ry |
y y0 |
|
; |
||
|
|
|
z |
|
|
rz |
|
|
|
||
R |
|
R |
|
X X |
|
|
x |
|
X |
|
S |
Ry |
AT RY |
AT Y YS |
. |
||
|
|
|
|
|
|
Rz |
RZ |
Z ZS |
|
||
(31)
(32)
Подставив выражения проекций векторов r и R из (31) и (32) в (30), будем иметь:
x x0
y y0
z |
|
a ( X X |
S |
) b (Y Y ) c (Z Z |
S |
) |
z |
|
X * |
|
|
||||||||||
1 |
|
1 |
S |
1 |
|
|
|
|
|
, |
|||||||||||
a ( X X |
S |
) b (Y Y ) c (Z Z |
S |
) |
|
Z * |
|||||||||||||||
|
3 |
|
3 |
S |
3 |
|
|
|
|
|
|
|
|
(33) |
|||||||
z |
|
a |
2 |
( X X |
S |
) b (Y Y ) c (Z Z |
S |
) |
z |
|
Y * |
|
|
||||||||
|
|
|
|
2 |
S |
2 |
|
|
|
|
|
|
|
. |
|||||||
|
a ( X X |
S |
) b (Y Y ) c (Z Z |
S |
) |
|
Z * |
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
3 |
|
|
3 |
S |
3 |
|
|
|
|
|
|
|
|
|
|
|||
Формулы (28) и (33) справедливы при любых значениях элементов ориентирования снимка.
Пусть x0 = y0 = 0, XS = YS = 0, ZS – Z = H, тогда при условии расположения осей как на рис. 24 (снимок можно считать горизонтальным) формулы (28) и (33) будут выглядеть следующим образом:
X H |
x0 |
, |
Y H |
y 0 |
. |
|
|||
|
|
|
(34) |
||||||
|
|
f |
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
||
x0 X |
|
f |
, |
y0 Y |
|
f |
, |
|
|
|
H |
|
H |
(35) |
|||||
|
|
|
|
|
|
|
|||
где x0, y0 – координаты точки горизонтального снимка.
Предположим теперь, что снимок наклонный, но при этом t 90 , 0.
53
vk.com/club152685050 | vk.com/id446425943
Матрица преобразования координат A будет иметь вид:
1 |
0 |
0 |
|
|
|
|
|
|
|
(36) |
|
A 0 |
cos |
sin |
|||
|
|||||
|
sin |
cos |
|
|
|
0 |
|
|
|||
И при указанных выше условиях (x0 = y0 = 0, XS = YS = 0, ZS – Z = H), получим:
X H |
x |
и Y H |
y cos f sin |
(37) |
|
f cos y sin |
f cos y sin |
||||
|
|
|
Уравнения (37) записаны для случая, когда начало координат на местности совмещено с точкой S или N, а на снимке - с главной точкой о. Если же начала координат перенести соответственно в точки C и c, то соотношения станут еще более простыми:
X H |
x |
, |
Y H |
y |
|
|
|
(38) |
|||
f y sin |
f y sin |
При условии, что за начало координат на местности принята точка N, а на снимке – соответствующая ей точка надира n, справедливы следующие соотношения;
X H |
x cos |
, |
Y H |
y cos 2 |
|
|
|
|
|
|
(39) |
||||
f y sin cos |
f y sin cos |
||||||
|
|
|
|||||
|
|
|
|
||||
Уравнения (38) и (39) легко получить из соотношения 37 и переносом систем координат на снимке и в пространстве.
3.5. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ ГОРИЗОНТАЛЬНОГО И НАКЛОННОГО СНИМКОВ.
В фотограмметрии часто применяются зависимости между координатами точек горизонтального и наклонного снимков. Их легко получить из уравнений (28) и (34), с учетом того, что ZS – Z = H и координаты главной точки равны нулю. Левые части этих уравнений выражают одни и те же величины – координаты X и Y точки местности. Поэтому справедливо:
X X |
|
H |
x a1 y a2 z a3 |
X |
|
|
H |
x0 |
, |
|||||
S |
x c1 x c2 z c3 |
S |
f |
|||||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||
Y Y H |
x b1 y b2 |
z b3 |
Y |
H |
y 0 . |
|
||||||||
|
|
|
|
|||||||||||
S |
|
|
x c1 y c2 |
z c3 |
S |
|
f |
|
|
|||||
|
|
|
|
|
|
|
||||||||
Откуда
x0 f |
x a1 y a2 z a3 |
, |
||||
x c y c |
z c |
|||||
|
|
|||||
|
1 |
2 |
3 |
|
(40) |
|
y0 f |
x b1 y b2 z b3 |
|
||||
. |
||||||
|
||||||
|
x c y c |
2 |
z c |
|
||
|
1 |
3 |
|
|
||
Таким образом, если |
даны |
|
его |
угловые элементы внешнего |
||
ориентирования, то по формулам (40) можно перейти от координат точек на наклонном снимке, к координатам соответствующих точек на горизонтальном снимке. Этот процесс называется трансформированием координат. Они справедливы при любых значениях угловых элементов внешнего ориентирования снимка.
54
vk.com/club152685050 | vk.com/id446425943
Подставив в уравнения (40) выражения направляющих косинусов из (21), после преобразований с точностью до членов второго порядка малости получим:
x0
y 0
|
|
x |
2 |
|
|
|
|
|
xy |
|
|
|||
x f |
|
|
|
|
|
y |
||||||||
|
|
|
|
|||||||||||
|
|
f |
|
|
|
|
|
|
f |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
xy |
|
|
|
|
|
|
y |
2 |
|
(41) |
|||
y |
|
f |
|
|
|
x |
||||||||
|
|
|
||||||||||||
|
f |
|
|
|
|
|
|
|
f |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
Приведенные формулы проще, но они перестали быть строгими.
Строгие и простые соотношения можно написать, если начало координат на снимке и на местности совместить с точкой нулевых искажений с, тогда с учетом уравнений (34) и(38) получим:
x0 |
|
|
x |
. , |
y 0 |
|
|
y |
. |
(42) |
||
|
|
|
|
|
|
|
|
|||||
|
y |
|
|
|
y |
|
|
|||||
1 |
|
sin |
|
1 |
|
sin |
|
|
||||
f |
|
|
f |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||
3.6. МАСШТАБ СНИМКА.
Масштабом снимка 1/m в данной точке по данному направлению называется отношение бесконечно малого отрезка dl на снимке к соответствующему отрезку dL на местности. То есть:
1 |
|
dl |
. |
(43) |
m |
|
|||
|
dL |
|
||
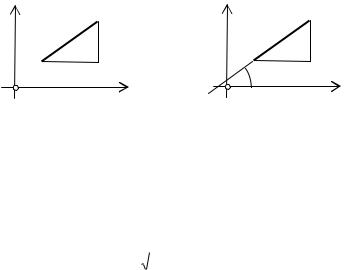
Пусть местность равнинная, а начала координат в пространстве и на снимке расположены соответственно в точках S и o, (рис. 32).
Y |
a |
y |
b |
|
|
dL |
|
dl |
dy |
|
dY |
|
|
|
|
dX |
|
dx |
x |
S |
X |
o |
|
|
|
|
|
Рис 32. a – горизонтальный отрезок на местности, b -его изображение
Обозначив проекции отрезков dl и dL на соответствующие координатные оси через dx, dy и dX, dY, с учетом данного определения масштаба и рис. 32 напишем:
1 |
|
|
dx |
|
|
|
, |
(44) |
m |
|
|
|
|
|
|||
|
|
|
|
|||||
|
cos dX |
2 |
dY 2 |
|
||||
где φ – угол между осью x снимка и заданным направлением отрезка dl.
При указанном выборе систем координат, и при условии, что оси ординат расположены в плоскости главного вертикала, справедливы уравнения (37) зависимости между координатами точек местности и снимка.
55

vk.com/club152685050 | vk.com/id446425943
Продифференцируем их по переменным x и y, в результате получим:
|
|
|
|
|
|
y |
|
|
|
|
x |
|
|
|
|||
|
|
|
|
|
cos |
|
|
sin |
dx |
|
|
sin dy |
|
||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Hdy |
|
|
f |
|
|
|
|
f |
|
|
|
||||
dY |
|
|
; dX H |
|
|
|
|
|
|
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
y |
2 |
|
|
|
|
|
y |
|
|
2 |
|||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
f cos |
|
sin |
|
f cos |
|
|
|
sin |
|
|
||||||
|
|
|
|
|
|||||||||||||
|
|
|
f |
|
|
|
|
|
|
|
f |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Введём обозначение:
|
|
k cos |
y |
sin , |
p |
x |
sin , . |
|
|||||||||
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
f |
|
|
|
f |
|
||||
и учтем, что dy=dxtg , тогда |
|
|
|
|
|
|
|
|
|
||||||||
dY |
H dx |
, |
dX |
H (k ptg ) dx |
, |
(45) |
|||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
f |
k 2 |
|
|
|
|
f k 2 |
|
|||||||
Подставив выражения dX и dY из соотношений (45) в формулу (44), |
|||||||||||||||||
будем иметь: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
|
|
|
|
|
f k 2 |
|
|
|
|
|
|
(46) |
|
|
m H |
|
|
|
|
|
|
|
|
|
|
. |
|||||
|
sin 2 |
(k cos p sin )2 |
|
||||||||||||||
Полученное равенство показывает, что масштаб снимка зависит от фокусного расстояния АФА, высоты фотографирования, угла наклона снимка, положения точки на снимке (координат x и y), в которой взят элемент dl и от направления φ этого элемента относительно линии главного вертикала .
Определим значение масштаба 1/m для частных случаев.
1. Масштаб горизонтального снимка (ε = 0). Подставив это значение в формулу (46), с учетом принятых обозначений k и p получим:
m1 Hf ,
т. е. масштаб горизонтального снимка плоской местности во всех точках постоянный.
2. Масштаб наклонного снимка по направлению главной вертикали (x = 0, φ = 90 ):
1 |
|
f |
|
|
|
y |
|
|
|
2 |
(47) |
|||
|
|
|
|
cos |
|
|
|
|
sin |
. |
||||
|
|
|
|
|
|
|
||||||||
|
m |
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
||||
На основании уравнения (47) запишем значение масштаба 1/m в |
||||||||||||||
характерных точках, лежащих на линии главного вертикала: |
|
|||||||||||||
В главной точке снимка o (y = 0) |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1 |
|
f |
cos2 ; |
|
|
||||||
|
|
|
|
|
m |
H |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
В точке нулевых искажений с y f |
tg |
|
|
, поэтому: |
|
|||||||||
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|||
56

vk.com/club152685050 | vk.com/id446425943
m1 Hf ;
В точке надира n ( y f tg ) , после подстановки получаем:
1 |
|
f |
; |
|
m |
H cos2 |
|||
|
|
В главной точке схода I ( y f ctg )
m1 0 .
Таким образом, масштаб в точке нулевых искажений равен, в главной точке мельче, а в точке надира крупнее масштаба горизонтального снимка. Масштаб в точке нулевых искажений называется главным масштабом снимка.
3. Масштаб наклонного снимка по направлению горизонтали (φ = 0°)
1 |
|
f |
|
y |
|
(48) |
|
|
|
cos |
|
sin |
|
|
|
|
||||
m |
|
|
|
f |
|
|
|
H |
|
|
|||
Поскольку в уравнении абсцисса точки отсутствует, то вдоль горизонтали, если местность равнинная, мосштаб величина постоянная.
Запишем выражения 1/m для горизонталей, проходящих через характерные точки снимка:
По линии действительного горизонта hi |
hi |
( y f |
ctg ) , поэтому: |
|||||||||||||||
|
|
1 |
|
0 ; |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
||||
Вдоль главной горизонтали h0 h0 ( y 0) , после подстановки имеем: |
||||||||||||||||||
1 |
|
|
|
|
|
|
f |
|
cos ; |
|
|
|
|
|
||||
|
m |
|
|
H |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На линии неискажённого масштаба hc |
hc |
|
|
y f |
tg |
|
|
, значит |
|
|||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
f |
; |
|
|
|
|
|
|
|||
|
|
|
|
m |
|
|
H |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
По горизонтали hnhn, проходящей через точку надира n |
( y f |
tg ) , и: |
||||||||||||||||
1 |
|
|
|
|
|
|
|
f |
. |
|
|
|
|
|
||||
|
m |
|
|
|
H cos |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Выполненный анализ показал, что масштаб снимка в точке c по любому направлению равен масштабу горизонтального снимка.
3.7. СМЕЩЕНИЕ ТОЧЕК И ИСКАЖЕНИЕ НАПРАВЛЕНИЙ, ВЫЗВАННОЕ НАКЛОНОМ СНИМКА.
Из формулы 42 следует справедливость пропорции: x0 y 0
x y
57
vk.com/club152685050 | vk.com/id446425943
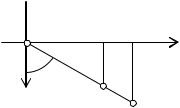
А это означает, что если наклонный снимок совместить с горизонтальным, вращением его вокруг линии неискаженных масштабов (рис. 33.) то соответствующие точки окажутся на одном луче, проходящем через точку нулевых искажений c.
с |
yr |
yo |
y |
|
|||
x |
o |
||
|
|
r |
x |
x |
ro |
|
|
|
|
|
Рис.33 Совмещенный чертеж
Разность
r r r0 . |
(49) |
называется смещением точки за наклон снимка. И понятно, что направлено оно вдоль луча, проходящего через точку c.
Очевидно, что в выше приведенную пропорцию между координатими можно включить отношение r0/r, тогда, с учетом соотношений (42), и того что x r sin , будем иметь:
|
|
|
r 0 |
|
|
r |
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
r sin sin |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
f |
|
|
|
|
|
|
Подставив это равенство в уравнение (49), после преобразований |
||||||||||||
получим: |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
r 2 sin sin |
|
r 2 |
sin sin |
. |
(50) |
||||
f |
r sin sin |
|
|
f |
||||||||
|
|
|
|
|
|
|
||||||
Из формулы (50) видно, что смещение r возможно как в сторону точки
нулевых искажений, при (0 , 180 ), так и в противоположную сторону. Максимально оно на главной вертикали (φ равно 90° или 270°). На линии неискаженных масштабов точки за наклон не смещаются.
Величина смещения зависит и от фокусного расстояния снимка. С его увеличением она уменьшается. Для планового снимка ( 3°) величину максимального смещения точек можно оценивать по приближенной формуле:
r |
|
r 2 |
. |
(51) |
|
f |
|||||
|
|
|
|
Оно приводит к ошибкам в определении по снимкам направлений, расстояний и площадей.
На рис. 33, кроме того, видно, что не изменился и угол , значит, если вершиной горизонтальных углов местности будет точка C, то на снимке они не искажаются.
Рассмотрим еще раз совмещенный чертеж (рис 34), введя дополнительно линию Ea на наклонном снимке и, соответствующую ей линию, на горизонтальном снимке. Как было показано, точки на линии неискаженных масштабов не смещаются, что относится и к точке E, а точка ao изменила свое
58

vk.com/club152685050 | vk.com/id446425943
положение. В результате изменилось направление Eao на угол A. Этот угол и называют искажением горизонтального направления на наклонном снимке. Не трудно заметить (рис.34), что tg A r / Ea , и с учетом приближенного
соотношения (50), а также того, что Ea=rtg , получим
tg A |
r cos sin |
|
|
f |
(52) |
||
|
|||
|
|
||
c |
y |
||
|
|||
r
a  r
r
A
ao
E
x
Рис. 34 Искажение направления на наклонном снимке
Формула (52) подтверждает, что направления не искажаются, если они проходят через точку нулевых искажений (т.е. при r=0), а также показывает, что и направления горизонталей не искажены ( =90 ). Искажение максимально при =90 . И если снимок плановый, то его можно оценить по приближенной формуле:
A=r /f |
(53) |
3.8. СМЕЩЕНИЕ ТОЧЕК И НАПРАВЛЕНИЙ НА СНИМКЕ, ВЫЗВАННОЕ РЕЛЬЕФОМ МЕСТНОСТИ.
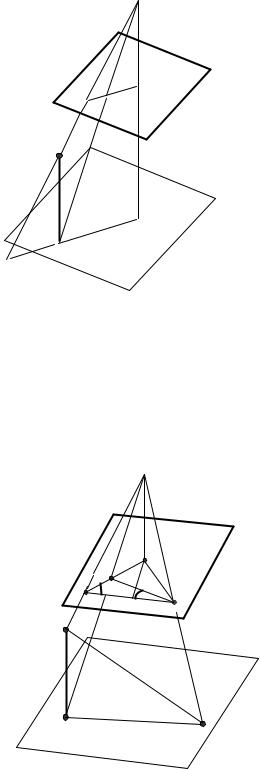
Рельеф местности также вызывает смещение точек, причем по направлениям проходящим через точку надира п, в которую сходятся изображения отвесных прямых. То есть, если h - превышение точки А над точкой В, расположенной в плоскости предмета, и отрезок АВ отвесный, то точка а на снимке сместится относительно точки b на величину ab = δrh (рис. 35). При h > 0 смещение происходит от точки надира, когда h < 0, – к точке надира.
Предположим, что снимок является горизонтальным, тогда SN=H, Sn=f, и если отрезок ab на снимке обозначить через r, то из прямоугольных треугольников можно составить следующие пропорции:
rh |
|
f |
, |
Ao B |
|
Ao N |
, |
Ao N |
|
H |
|
Ao B |
H |
h |
H |
r |
f |
||||||
|
|
|
|
|
Теперь, путем последовательной подстановки получаем:
r |
|
rh |
. |
(54) |
|
h |
|
H |
|
|
|
|
|
|
|
||
Можно доказать, что полученная формула дает |
хорошую |
оценку |
|||
59
vk.com/club152685050 | vk.com/id446425943
величины смещения точек за рельеф и для плановых снимков. Значит, по измеренной на плановом снимке величине смещения rh можно в ряде случаев с
достаточной для практики точностью определить высоту отдельных объектов (дерева, столба, здания, трубы и т. д.).
 S
S
 n
n
a
 b
b
A
h
 N
N
B 
Ao 
Рис. 35 Смещение за рельеф
Смещение точек за рельеф приводит на снимке и к искажению направлений отрезков, иногда довольно значительному. Для простоты рассмотрим горизонтальный снимок, на котором изображены отрезок AB и его горизонтальная проекция AoB (рис.36). Искажением направления за рельеф является угол A. В соответствии с теоремой синусов (треугольник aaob), имеем:
 S
S
|
|
n |
|
|
ao |
d |
|
|
|
||
a |
A |
||
|
|||
|
|
b |
h

B
Рис. 36 Искажение за рельеф
60