

ФОТОГРАММЕТРИЯ
.pdfvk.com/club152685050 | vk.com/id446425943
будет производиться по соответствующим цифровым изображениям снимков. Формирование цифрового фотоплана в пределах каждого из этих участков производится аналогично процессу формирования цифрового ортоснимка, изложенного в разделе выше.
Определение координат X,Y узлов полилинии в системе координат цифрового фотоплана по значениям координат xc, yc их изображений в системе координат цифрового изображения снимка производится методом приближений следующим образом.
По координатам xc, yc изображения узла вычисляются координаты x, y изображения узла в системе координат снимка. В случае если при внутреннем ориентировании цифрового снимка использовались аффинные преобразования, эти вычисления производятся по формулам:
x |
|
a |
0 |
|
a a |
|
x |
c |
|
|
||
|
|
|
|
|
1 |
|
2 |
|
. |
|
||
y |
|
b0 |
b1 |
b2 yc |
|
|||||||
Затем вычисляются значения координат X, Y узла в системе координат |
||||||||||||
цифрового фотоплана по формулам: |
|
|
|
|
|
|
|
|
||||
X = XS + (Z – ZS)X /Z |
|
|
|
|
Y = YS + (Z – ZS)Y /Z , |
(162) |
||||||
в которых: |
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
x x0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
A y y0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
||
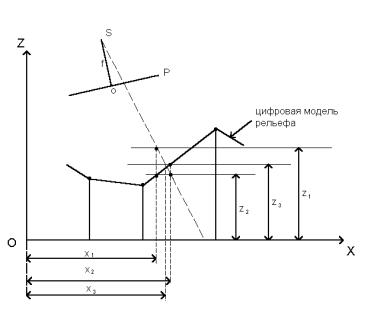
Впервом приближении значение высоты узла принимают равной
среднему значению высот точек цифровой модели рельефа Z1. По вычисленным значениям X1,Y1, используя цифровую модель рельефа, методом билинейной интерполяции, определяют уточненное значение высоты узла Z2, по которому определяют уточненное значение координат узла X2,Y2. По координатам X2, Y2 узла, в свою очередь, определяют новое значение высоты узла Z3.
Вычисление продолжают до тех пор, пока разность значений координат X и Y узла в приближениях не будут превышать установленного допуска. Возможен вариант, в котором контролируется разность высот точек узла в приближениях.
Процесс определения координат X,Y узлов полилинии методом приближений представлен на рис.81. Отметим также, что цифровые методы позволяют использовать параметры сглаживания Их следует устанавливать для того, чтобы добиться изменения оптических плотностей (функции яркости) снимков с целью их взаимного выравнивания (уравнять общий фон разных фотоснимков для того, чтобы уменьшить контрастность перехода от одного снимка к другому). В результате переход от одного фотоснимка к другому становится незаметен.
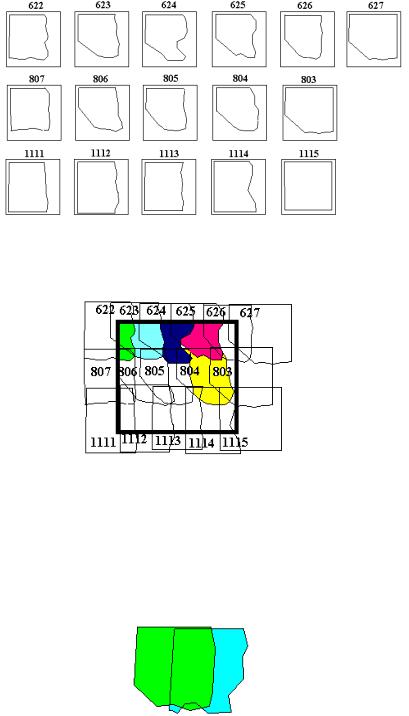
ВТалке (Тюкавкин) соединение снимков в фотоплан или фотосхему происходит так: фотоснимки упорядочиваются в маршрутах слева направо (а если маршруты идут по столбцам маршрутной схемы, то сверху вниз), а сами маршруты - сверху вниз. Так, в приведенном ниже примере 622 - первый снимок проекта, 623 - второй –… -, 807 седьмой и т.д. Пусть фотоснимки проекта расположены в трех маршрутах, идущих по строкам маршрутной схемы следующим образом:
622 |
623 |
624 |
625 |
626 |
627 |
807 |
806 |
805 |
804 |
803 |
|
151
vk.com/club152685050 | vk.com/id446425943
1111 1112 1113 1114 1115
Рис.81 Первый фотоснимок проекта укладываются на создаваемый лист
фотоплана с учетом искажений за рельеф, наклона оптической оси, дисторсии и т.п. При этом заполняется только те точки (пиксели) фотоплана, которые приходят из области, нанесенной на первом снимке, то есть часть снимка вне области как бы отрезается и выбрасывается.
После этого берется второй фотоснимок и вычисляется, с учетом всех законов трансформирования, зона на листе фотоплана, в которую перейдет область второго фотоснимка. Эта зона заполняется значениями оптических плотностей второго фотоснимка. Причем в пересечении зон остаются значения оптических плотностей первого снимка. Таким образом, фотоснимок с меньшим номером имеет приоритет при заполнении фотоплана.
Вывод следует такой: при нанесении зоны на снимке редактировать ее левую и верхнюю сторону не нужно, так как эта сторона накрывается другим снимком. Области на снимках должны выглядеть примерно так, как показано на рис. 82
На рис 83 изображена примерная укладка областей на лист фотоплана. Сам лист изображен жирной черной рамкой. Все, что вне рамки - не заполняется.
Область, заполняемая со снимка 622, залита зеленым, снимок 623 – голубым, 624 – синим, 625 – красным, 804 – желтым (остальные не показаны).
Из рисунка ясно, почему не нужно редактировать левую и верхнюю границу области фотоснимка 804 - они все равно затираются фотоснимками 625, 626 сверху и фотоснимком 805 слева, так как данные снимки имеют приоритет. Более того, редактирование верхней и правой границы области фотоснимка 804 вредно, так как при этом можно случайно «отрезать лишнее», что приведет к появлению черной дыры на фотоплане.
152
vk.com/club152685050 | vk.com/id446425943
Рис. 82
Рис 83
Для наглядности такая ошибка в построении областей приведена на рис. 83. Между снимками 625, 626 и 804 имеется «дыра». Она появилась из-за неправильно построенной области на снимке 625, там есть большая неоправданная выемка. Вообще же линию разреза, то есть редактируемую правую и нижнюю сторону следует вести примерно посередине области перекрытия снимков, то есть процентов на 30 размера снимка от правого края и на 15-20 от нижнего.
Рис. 84
Следует обратить внимание и на то, что область на снимке 625 после входа (если идти справа налево в нижней части снимка) в область снимка 624 резко поднимается вверх. Это делается для того, чтобы избежать повторного выхода из области. Такая ошибка демонстрируется на рис. 84:
Собственно, ошибкой это не является, но производит неприятное впечатление мелкокусочного фотоплана.
После примерного построения областей обычно приступают к их редактированию. Для этого каждый снимок открывается отдельно и области редактируются в крупном увеличении, обычно от 1:4 или даже 1:1. При этом
153
vk.com/club152685050 | vk.com/id446425943
для редактируемых сторон областей необходимо придерживаться следующих принципов.
1)граница области должна проходить вблизи от центральной линии зоны перекрытия соседних снимков; для продольного перекрытия это обычно означает отступ порядка 30% от края фотоснимка (так как зона перекрытия имеет порядок 60%), для поперечного - порядка 15% от края;
2)в случае использования метода «фотоплан» без построения рельефа граница области должна проходить по возможности вблизи от определяемых или опорных точек, заданных оператором в процессе работы с точками; допускается прохождение границы через точки;
3)граница области не должна разрезать малоразмерные высотные объекты, в основном это относится к зданиям и постройкам всех типов;
4)длинномерные объекты и четкие контура (дороги, реки и т.п.), которые невозможно обойти, должны разрезаться по возможности под прямым углом закругленные углы и линии (то есть ломаные линии с большим числом;
5)предпочтительнее закругленные углы и линии (то есть ломаные линии с большим числом звеньев).
6.2.9.3 Точности цифровых трансформированных фотоснимков и фотопланов
Созданные в результате цифрового трансформирования снимков цифровые изображения местности по точности должны соответствовать требованиям, предъявляемым к их точности нормативными документами Роскартографии, если фотопланы предназначены для создания кадастровых и топографических карт (планов) или технического задания на производство работ, если фотопланы создаются для решения других задач.
Контроль созданных трансформированных фотосников и фотопланов проводят по расхождениям значений координат контрольных точек, измеренных непосредственно на цифровом плане и координат этих точек, определенных в результате геодезических измерений или в результате построения сети пространственной фототриангуляции. В качестве контрольных точек выбираются точки, расположенные непосредственно на земной поверхности, так как изображения объектов местности возвышающихся над ней (крыши домов, мосты и т.п.) имеют на фотопланах искажения. Контроль фотопланов производится также по расхождениям одноименных контуров расположенных на линии пореза (граничной линии) смежных трансформированных фотоснимков.
В случае если трансформированные фотоснимки и фотопланы создавались для создания топографических и кадастровых карт (планов), расхождения в плане положения контрольных точек не должны превышать величины 0.5 мм в масштабе создаваемой карты (плана), а расхождения одноименных контуров на граничной линии величины 0.7 мм.
Перед процессом формирования цифровых трансформированных изображений, с целью контроля точности определения элементов ориентирования исходных снимков и построенной цифровой модели рельефа местности, производят априорную оценку их точности.
Она производится по контрольным точкам, путем сравнения значений их плановых координат, определенных в результате геодезических или фотограмметрических определений и значений координат расчетного
154
vk.com/club152685050 | vk.com/id446425943
положения изображения контрольной точки на трансформированном изображении.
Определение плановых координат расчетного положения изображения контрольной точки производится по значениям координат изображений контрольных точек на исходных снимках, значениям элементов внутреннего и внешнего ориентирования снимков, параметрам внутреннего ориентирования снимка в системе координат цифрового изображения с использованием цифровой модели рельефа. При этом используется алгоритм, аналогичный алгоритму определения координат углов граничной линии на фотоплане.
При определении координат в качестве начального приближения, используется высота контрольной точки, значение которой было определено в результате геодезических или фотограмметрических определений.
Проведение априорной оценки точности позволяет проконтролировать качество фотограмметрических работ, выполняемых для обеспечения процесса цифрового трансформирования и при необходимости повторить эти процессы.
6.2.10 ОСНОВНЫЕ СВЕДЕНИЯ О ВЕКТОРИЗАЦИИ
Векторизация это один из основных процессов любой цифровой фотограмметрической системы. Можно сказать, что все остальные действия: внутреннее ориентирование снимков, их взаимное ориентирование и т. д. для этого и выполняются. В процессе векторизации по растровому изображению наносятся ситуация и пикеты характерных точек местности.
В программном комплексе PHOTOMOD для построения и редактирования в моно или стереорежиме визуализации векторных объектов: пикетов, полилиний, контуров и прямоугольников предназначен специальный модуль стереовекторизации StereoDraw. У цифровой фотограмметрической станции ЦФС этому процессу отведен специальный режим работы «Сбор», который предназначен для векторизации данных с растровых источников (сканированных аэро и космических снимков, планов и т.п.). Существует такой режим работы и в программе Талка. Он называется «Стереокарта».
Технология сбора ситуации и рельефа в каждом из рассматриваемых программных продуктов своя. Но много и общих черт. Связано это с тем, что любой векторный объекты представляют собой сочетание координатной информации о пространственной форме объекта (координаты вершин) и атрибутивной информации, описывающей тематическое содержание объекта.
Во всех программах поддерживается понятие слой. Это основная характеристикой объекта. Он определяет его групповую принадлежность и вид на карте. Концепция слоев позволяет группировать близкие по какому-либо признаку объекты на отдельных слоях, управлять видимостью и экспортом объектов. Остальные названия в иерархии атрибутов различны.
Например, в ЦФС Слой имеет имя, которое описывает принадлежащие ему объекты (например: дорога проселочная) и идентификатор - уникальный номер. Он содержит информацию об атрибутах линии и заливки, условном знаке, и пр. Ему могут быть доступны (по выбору пользователя) различные параметры, то есть поля базы данных, в которых хранятся характеристики объектов. Он имеет поле статуса, которое управляет видимостью и редактированием его объектов. Используя код слоя (поле ID в Менеджере слоев), можно организовать слои в иерархическом порядке. Иерархия позволяет просматривать слои в виде "дерева", что облегчает ориентирование в длинном
155
vk.com/club152685050 | vk.com/id446425943
списке. Слои располагаются в списке в определенном порядке: они могут быть упорядочены по имени, либо по идентификатору. Идентификатор слоя влияет также на иерархию слоев, когда список изображается в виде "дерева".
Используется в ЦФС и понятие «параметры». Это характеристики объекта, которые описывают каждый объект в отдельности, сохраняя для каждого его уникальные свойства. Параметры представляют собой поля внутренней базы данных, которая сохраняется вместе с картой. Подпись представляет собой любой параметр объекта, который выносится на карту для отображения. Геометрические характеристики объектов (точка, прямоугольник, сфера и т.д.) объединены понятием «шаблон».
Впрограмме PHOTOMOD каждый из графических объектов также относится к некоторому слою. Если в процессе создания векторных объектов используется таблица кодов (классификатор), любой объект может быть к ней привязан, т.е. ему может быть присвоен код при его создании или впоследствии.
Вэтом случае информационное содержание объекта (значения большинства свойств и состав атрибутов) определяется описанием данного кода в таблице и может изменяться только вместе с кодом. Таблица кодов хранится в ASCII файле с расширением .ctb и может загружаться либо при запуске модуля StereoDraw, либо впоследствии с помощью команды «Загрузить таблицу кодов» из меню «Файл».
Каждый из векторных объектов описывается следующим набором свойств: имя, тип, слой, размер, код, имя кода, символ и цвет.
Атрибуты - это дополнительные параметры, которые могут приписываться объекту, если он создается с использованием таблицы кодов, и соответствующий ему код характеризуется наличием атрибутов (т.е. этот код присутствует в таблице атрибутов). В этом случае описание атрибутов должно содержаться в таблице атрибутов, которая хранится в отдельном ASCII файле в той же директории и с тем же именем, что и у файла таблицы кодов, но с расширением .atb. Атрибуты, описанные в таблице атрибутов, приписываются всем объектам с данным кодом при их создании.
Объекты, не привязанные к таблице кодов, могут иметь произвольные значения свойств и состав атрибутов. Они является индивидуальной характеристикой объекта независимо от того, связан данный объект с таблицей кодов или нет.
Впрограмме Талка для каждого векторного объекта карты, помимо координат вершин и идентификатора объекта, в базе данных хранится внутренний код. Идентификаторы двух различных объектов карты всегда различны. Внутренний код является общим для некоторой группы объектов карты (слоя). Он почти всегда скрыт от пользователя. Классификатор служит для того, чтобы каждому внутреннему коду сопоставить некоторые характеристики. К ним можно отнести: геометрический тип объекта (область, линия, точка или массив точек), толщину и цвет линии, семантику (название кода), знак (для точечных объектов), а также внешний цифровой код («Код Невы – Панорамы»).
Следует отметить, что все программные продукты позволяют создавать новые классификаторы и редактировать существующие. Саму технику векторизации можно изучить только при работе с конкретной прогаммой. Созданные векторные объекты могут затем использоваться при построения ЦМР (модуль PHOTOMOD DTM) для создания трехмерной сеточной модели или экспортироваться в различные векторные форматы для использования в
156
vk.com/club152685050 | vk.com/id446425943
других системах (в DXF файл, в какие либо разновидности ASCII формата и т.д.)
6.2.11ПОСТРОЕНИЕ ЦИФРОВЫХ МОДЕЛЕЙ
Построение ЦМР это также очень важный этап работы любой цифровой фотограмметрической системы. Без нее невозможно выполнить трансформирование снимков рельефной местности и ортотрансформирование, автоматизировать процесс нанесение горизонталей и проч. Кроме того, ЦМР представляет и самостоятельный интерес для специалистов различных областей науки и техники.
Строят ее в ручном и автоматическом режиме. В первом случае необходимо набрать высотные пикеты характерных точек рельефа местности и по характерным его линиям. Чем больше таких точек, тем точнее будет ЦМР.
При построении в автоматическом режиме получается, как правило, регулярная ЦМР, являющаяся набором точек в некоторых границах, расположенных по сетке с одинаковым шагом. Значения высот в этих точках определяются с помощью коррелятора (например, модуль DTM программы PHOTOMOD) или методом интерполирования по значениям высот, набранных в процессе векторизации пикетов (Талка).
Алгоритмы построения ЦМР различны, и в модуле DTM (Digital Terrain Model), например, их несколько: регулярная, адаптивная, гладкая и оптимизация. Он строит и визуализирует ЦМР исследуемого объекта в виде пространственной сети триангуляции TIN (Triangulation Irregular Network);
Какую из четырех моделей построения ЦМР использовать зависит от характера местности.
Любая программа обеспечивает редактирование ЦМР, построенной в автоматическом режиме, проведение горизонталей с заданным сечением, построение профилей местности, определение объемов и т.д.
6.2.12ОСОБЕННОСТИ ОСНОВНЫХ ОТЕЧЕСТВЕННЫХ ФОТОГРАММЕТРИЧЕСКИХ
СТАНЦИЙ
6.2.12.1 Пакет PHOTMOD SP
PHOTMOD это название программного обеспечение для персональных компьютеров по цифровой обработки снимков, которое было разработано, постоянно совершенствуется и внедряется компанией Ракурс (Москва). Компания была основана в 1993 году, и в настоящее время ее продукция успешно эксплуатируется на многих предприятиях России, странах СНГ и дальнего зарубежья. Одним из первых ее продуктов и был PHOTMOD SP, который ориентировался, прежде всего, на обработку наземным снимков. Он имел модульную структуру, и обеспечивал: построение моделей по паре снимков и их внешнее ориентирование; построение цифровых моделей рельефа и работу с ними; трансформирование снимков и векторизацию. К сожалению это направление пока не получило дальнейшего развития. Затем появился PHOTMOD АТ, обеспечивающий обработку блока снимков, состоящего из нескольких маршрутов. Последняя версия PHOTMOD 3.51 обеспечивает:
-Обработку снимков центральной проекции и сканерных изображений.
-Выполнение блочной фототриангуляции.
-Создание цифровых моделей рельефа.
-Создание ортофотоплана.
157
vk.com/club152685050 | vk.com/id446425943
-Векторизацию в стереорежиме и по ортофотоплану.
-Создание и печать электронных карт.
-Калибровку планшетных полиграфических сканеров.
Рекомендуемые требования к программным и аппаратным средствам: процессор Pentium IV 2 GHc; оперативная память 512 MB; операционная система Windows 2000; графическая карта True color, 64 MB, аппаратная поддержка OpenGL quad-buffering. К дополнительному оборудованию относят жидкокристалические (затворные) и анаглифические очки для стереонаблюдений и специализированную 10-кнопочную мышь.
Благодаря гибкой модульной структуре и сетевым возможностям PHOTMOD может использоваться как:
-Локальная полнофункциональная цифровая фотограмметрическая станция.
-Распределенная сетевая среда для реализации больших проектов
-Дополнительные рабочие места к имеющимся фотограмметрическим системам типа Helava, Integraf для выполнения наиболее трудоемких
операций (стереовекторизации, построения и редактирования ЦМР).
Как отмечалось, PHOTMOD SP хорошо адаптирован для наземной фотограмметрии. Он многомодульный и включает:
1.Основной модуль. Он предназначен, главным образом, для построения модели по паре снимков и ее внешнего ориентирования.
2.Модуль стереовекторизации (StereoDraw) – служит для построения и редактирования в моно или стереорежиме визуализации векторных объектов: точек, полилиний, полигонов и прямоугольников.
3.Программный модуль создания цифровых моделей рельефа (ЦМР или DTM (Digital Terrain Model)). Он не может эксплуатироваться автономно, поскольку использует результаты процедур взаимного и внешнего ориентирования, в модулях PHOTOMOD SP. Модуль предназначен: для построения и визуализации ЦМР исследуемого объекта в виде пространственной сети триангуляции TIN (Triangulation Irregular Network);
анализа и редактирования модели в режимах моно и стереоскопического отображения; формирования в автоматическом режиме ортотрансформированных изображений; расчета и визуализации горизонталей; экспорта ЦМР (TIN) в распространенные векторные форматы и т.д.
4.Модуль VectOr - это фактически геоинформационная система, предназначенная для создания и редактирования электронных карт, решения типовых прикладных задач и разработки специализированных ГИС-
приложений в среде Windows 95, 98, Windows NT и Windows CE. Система
позволяет создавать векторные, растровые и матричные карты, а также оперативно обновлять различную информацию о местности.
При реализации нового проекта работу начинают с основного модуля. Предварительно снимки (если они не цифровые) сканируют с учетом изложенных выше рекомендаций. Но следует помнить, что чрезмерно завышать уровень разрешения нецелесообразно, так как резко возрастает объем обрабатываемой информации, что приводит к трудностям в работе. Для компенсации искажений возникающих при использовании полиграфического сканера используют специальную технологию, которая включает: сканирование калибровочной сетки, расчет поля искажения сканера и коррекцию цифрового снимка с помощью программы Scan-Correct. Сохранять цифровые снимки следует в формате .bmp
158
vk.com/club152685050 | vk.com/id446425943
Далее создается база данных, в которой хранятся исходные цифровые снимки и будут храниться все другие изображения и данные, появление которых связано с построением и внешним ориентированием модели. В процессе работы может быть создано несколько баз данных, но работать можно только с текущей.
Окно базы данных является одним из основных элементов интерфейса программы. Оно служит для отображения информации о текущей базе данных и для выполнения операций над ее объектами. Основными такими операциями являются: ввод исходной стереопары; внутреннее ориентирование снимков, геопривязка левого снимка; обеспечение стереопары набором соответственных точек; взаимное ориентирование снимков (построение модели); перенесение опознаков на правый снимок, внешнее ориентирование модели, выход из модуля ориентирования с сохранением полученных результатов. Рассмотрим каждую из операций в отдельности, но конечно без детализации.
Для того, чтобы ввести снимки нужно воспользоваться виртуальными клавишами левый/правый в окне базы данных и указать в диалоговом окне путь и имя bmp файла, содержащего соответствующее изображение. При выполнении операции цветные снимки можно преобразовать в черно-белые и изменить масштаб изображения.
Впроцессе внутреннего ориентирования снимков (виртуальная клавиша внутреннее ориентирование) с помощью марки указываются координатные метки на левом и правом снимках, положение главной точки (смещение объектива). Кроме того, вводится фокусное расстояние снимков, расстояния между координатными метками и дисторсия, если они известны. В качестве единиц измерения выбирают миллиметры или пикселы. Пересчет из одной системы в другую легко выполнить, если известно разрешение сканирования, которое вводится при первом запуске базы.
Геопривязка включает выбор системы координат, нанесение на левый снимок опознаков и опорных отрезков, если такие есть (до 99 единиц каждого из объектов), введение координат точек базиса. Возможен и процесс редактирования.
Впрограмме предусмотрено, что для взаимного ориентирования снимков необходимо иметь как минимум 8 соответственных точек. Первые три вводятся вручную, но их положение может быть уточнено с помощью механизма корреляции. Затем может быть задействован механизм автоматического добавления соответственных точек. В процессе выбора точек на экран выдается сообщение о величине коэффициента корреляции. Хорошо когда он более 0.9, но даже и в этом случае корреляционный механизм дает сбои и оператору необходимо осуществлять визуальный контроль. В процессе их введения можно заниматься редактированием.
При взаимном ориентировании программа определяет взаимное угловое расположение снимков в момент съемки и преобразует исходные изображения в трансформированные. Их еще называют эпиполярными снимками. Такие изображения имеют те же центры проекций, но отличаются тем, что соответственные точки на них имеют практически одинаковые y- координаты, что значительно ускоряет автоматический поиск соответственных точек и выполнение основанных на нем операций измерений и автоматического построения ЦМР. При известных параметрах внутреннего ориентирования, программа использует классические уравнения коллинеарности для множества пар соответственных точек, задаваемых в полуавтоматическом режиме.
159
vk.com/club152685050 | vk.com/id446425943
Существенным преимуществом программы является возможность проведения взаимного ориентирования при неточном знании параметров внутреннего ориентирования, что делает возможным использование программы в задачах с неполным набором исходных данных. Взаимное ориентирование выполняется, если соответственных точек не менее 8 нажатием на соответствующую виртуальную клавишу. В результате на экране появляется сообщение, в котором указываются элементы взаимного ориентирования в базисной системе координат (если решение найдено) максимальное значение остаточного поперечного параллакса в пикселах и его среднее значение. Можно вызвать таблицу соответственных точек с параллаксами на каждой из них, что позволяет плохие точки удалить и взаимное ориентирование повторить. Считается приемлемым, если остаточные поперечные параллаксы по величине не превосходят одного пиксела.
Процедура абсолютного (внешнего) ориентирования модели служит для определения параметров ее пространственного и углового расположения по имеющимся опорным данным. В качестве опорных данных могут использоваться опорные точки и (или) опорные отрезки. В зависимости от количества и типа используемых опорных данных, процедура абсолютного ориентирования позволяет построить либо свободную модель, имеющую правильный масштаб, но произвольную ориентацию в пространстве, либо модель в пользовательской системе координат (в той системе координат, в которой заданы опорные точки). Для построения свободной модели необходим лишь один (для большей точности лучше два) опорный отрезок, а для построения модели в пользовательской системе координат – не менее четырех опорных точек, с известными X, Y, Z координатами. Избыточное количество опорных данных позволяет компенсировать ошибки, внесенные на этапе взаимного ориентирования из-за неточности параметров внутреннего ориентирования.
Перед внешним ориентированием модели следует перенести опознаки с правого снимка на левый. Для этого можно использовать корреляционный механизм, но если коэффициент корреляции мал, то лучше это сделать вручную.
После операции переноса опознаков выполняется внешнее (абсолютное ориентирование) модели. При этом в процесс уравнивания можно включать и не включать точки базиса, корректировать список используемых опознаков, редактировать их координаты и т.д. Основные результаты внешнего ориентирования показываются в окне, которое является предметом анализа. Если результаты удовлетворительны, из модуля можно выходить с сохранением результата. Программа выполнит трансформирование изображение и сформирует стереоизображение, которое можно рассматривать уже в другом модуле StereoDraw.
Рассматривать стереокартину в указанном выше модуле, можно используя анаглифические или затворные очки (по выбору). Пространственная измерительная марка управляется как с клавиатуры, так и мышью. Можно использовать и коррелятор. На экране отображаются пространственные координаты марки. Модуль является основным при съемке подробностей. Основными элементами, которые можно использовать при нанесении ситуации и рельефа являются векторные объекты: точка, полилиния, полигон и прямоугольник. Каждый из векторных объектов имеет набор характеризующих его параметров. Часть из них задается с помощью таблицы кодов, которую
160