

ФОТОГРАММЕТРИЯ
.pdfvk.com/club152685050 | vk.com/id446425943
r sin sin A
bao
Обозначим отрезок an через r, тогда очевидно aao – смещение rh точки A за рельеф. Из рис. 36 следует, что sin =d/r и AoB=h/tg , тогда, с учетом того, что aob= fAoB/H и формулы (54), получим:
sin A |
d |
tg |
d |
|
|
|
|
(55) |
|||
|
f |
|
f |
||
|
|
|
|||
Анализ формулы (55)показывает, что при d=f искажение направления отрезка может оказаться равным его угла наклона.
3.9. ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ СНИМКА
Для решения ряда фотограмметрических задач необходимо знать элементы ориентирования снимка.
Его элементы внешнего ориентирования могут быть получены либо с помощью специальных приборов в процессе аэрофотосъёмки либо в камеральных условиях по геодезическим и фотокоординатам опорных точек. Второй вариант назвали обратной пространственной фотограмметрической засечкой. Математической основой ее решения являются прямые или обратные уравнения коллинеарности.
Рассмотрим один из возможных способов математического решения засечки, основанный на применении уравнений (33).
Пусть на снимке изобразились точки местности, геодезические координаты которых известны (такие точки называют опознаками), и координаты x, y этих точек определены по данным измерений снимка. Примем, что элементы внутреннего ориентирования снимка даны. Тогда неизвестными величинами в формулах (33) окажутся координаты XS,, YS,, ZS центра проекции снимка и три угла , , . Указанные уравнения нелинейны по отношению к
неизвестным, поэтому последние определяются способом приближений. То есть, вначале из каких-либо соображений принимают приближенные значения неизвестных, а затем определяют поправки к ним, используя технику уравнивания параметрическим способом. Таким образом, задачу решают следующим образом:
1.Определяют приближенные значения элементов внешнего ориентирования снимка. Например, угловые величины принимают равными нулю, а координаты центра проекции определяют по данным бортовых измерений или каким-либо другим способом.
2.Выполняют измерение с целью определения координат x и y опознаков на снимках.
3.Приближенные значения элементов внешнего ориентирования, а также элементы внутреннего ориентирования и заданные координаты опознаков
подставляют в уравнения (33) и вычисляют координаты x и y изображений опознаков на снимке. В силу погрешностей измерений, неточности приближенных величин, принятых в качестве неизвестных, и других причин вычисленные координаты не будут равны измеренным.
61

vk.com/club152685050 | vk.com/id446425943
4. Составляют уравнения поправок, принимая разности l между измеренными и вычисленными координатами точек на снимке в качестве их свободных членов. Указанные уравнения будут иметь вид:
a X S b YS c ZS d e g lx x
(56)
a X S b YS c ZS d e g ly y ,
где XS , YS ,....., - поправки в приближённые значения элементов внешнего ориентирования снимка; lx=x - x ; ly=y - y ; x , y – поправки в измеренные
координаты x, y. Численные значения коэффициентов a, b,…, g' уравнений (56) вычисляются как частные производные функций x, y (уравнения 33) по соответствующим переменным. Например:
a |
x |
z |
a |
3 |
X a Z |
|
|
|
|
|
1 |
и т.д. |
|||
X |
s |
|
|
(Z )2 |
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Система уравнений (56) содержит шесть неизвестных. Один опознак позволяет составить два уравнения, поэтому для решения задачи их должно быть не менее трех.
5. При избыточном количестве опознаков система линейных уравнений решается при условии
V T PV min
где Р – матрица весов измеренных координат точек снимка.
То есть составляют и решают нормальные уравнения. Для системы (56) они имеют вид:
(BT PB) BT Pl 0, |
(57) |
где В – матрица коэффициентов a, b,…,g' для опорных точек снимка; δ – вектор поправок X S , YS ,..., ; l – вектор свободных членов уравнений (56).
Решая уравнения (57), определяют вектор поправок
(BT PB) 1 BT Pl. |
(58) |
6.Вводят поправки δ к приближённым значениям элементов внешнего ориентирования, получают уточнённые значения неизвестных. Поскольку исходная система (35) нелинейная, а приближённые значения могут существенно отличаться от искомых величин, вычисления повторяют, начиная с пункта 3, и продолжают их до тех пор, пока разность векторов δ двух последних приближений не станет меньше установленного допуска. Такой путь решения называют методом итераций.
7.Выполняют оценку точности решения задачи. Для этого в последнем приближении вычисляют весовые коэффициенты Q и поправки V. Средние квадратические ошибки элементов вычисляют по формуле:
|
|
|
(59) |
mi Qii , |
|||
где i = 1, 2, 3,…,6 – номер поправки δ в уравнениях (56). Ошибка единицы веса находят из соотношения
|
P |
2 P |
2 |
|
(60) |
|
x x |
y y |
|
, |
|
2n 6 |
|
|
|||
|
|
|
|
||
где п – число опорных точек.
62
vk.com/club152685050 | vk.com/id446425943
Иногда, например, при калибровке камер, возникает задача определения и элементов внутреннего ориентирования снимка. В этом случае необходимо дополнить матрицу δ поправками x0 , y0 , f , а матрицу В – коэффициентами h,
m, n, h', m', n' при определяемых поправках. Поскольку количество неизвестных увеличивается до 9, число опознаков необходимых для решения задачи, должно быть не менее 5, а ошибка единицы веса должна определяться по формуле:
|
P |
2 P |
2 |
|
(61) |
|
x x |
y y |
|
. |
|
2n 9 |
|
|
|||
|
|
|
|
||
Следует иметь в виду, что при аэрофотосъёмке равнинной местности включение дополнительных неизвестных в систему уравнений поправок приводит к ухудшению обусловленности матрицы системы нормальных уравнений. Это приводит к снижению точности определения искомых величин.
4.ТЕОРИЯ ПАРЫ СНИМКОВ.
4.1СТЕРЕОСКОПИЧЕСКАЯ ПАРА СНИМКОВ И ЭЛЕМЕНТЫ ЕЕ
ОРИЕНТИРОВАНИЯ
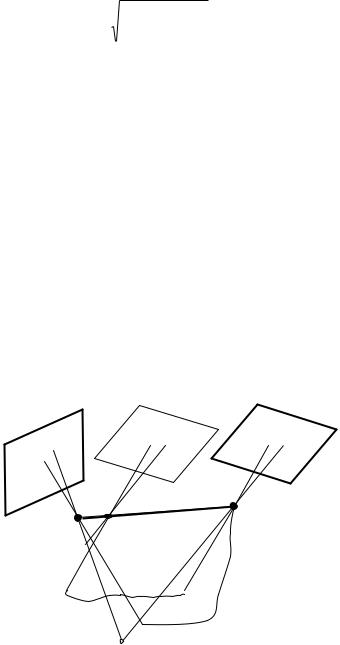
Два снимка с изображениями одного и того же участка местности, полученные с двух точек пространства, называются стереоскопической парой снимков (стереопарой). Снимок, полученный с точки фотографирования S1, называется левым, а с S2 – правым.
На рис. 37 изображена пара снимков в положении, которое она занимала в момент фотографирования. А – точка местности, изобразившаяся на снимках в точках а1 и а2. Они называются соответственными или одноимёнными точками. Проектирующие лучи S1A и S2A, проходящие через эти точки называются соответственными или одноимёнными проектирующими лучами.
a1 |
a2 |
a2 |
bп |
|
S2 |
S1 |
S2 |
|
A |
|
|
W2 |
|
|
|
W1 |
|
|
A |
|
Рис.37.
Расстояние В между точками фотографирования S1 и S2 – базис фотографирования.
Плоскость WA, проходящая через базис и точку А местности есть базисная плоскость.
63
vk.com/club152685050 | vk.com/id446425943
Плоскости, проходящие через базис фотографирования и главные лучи являются главными базисными плоскостями (W1 - левого W2 - правого снимков).
Любая пара соответственных лучей пересекается, если снимки занимают положение, которое было в момент фотографирования. Совокупность их точек пересечения образует поверхность. Ее называют стереомоделью или просто моделью местности. При выше названных условиях она совпадает с земной поверхностью, значит масштаб такой модели 1:1.
Представим теперь, что одна из связок (например, правая) поступательно перемещается вдоль базиса из положения S2 в S2 . Модель при этом не разрушится, но изменится ее масштаб. Расстояние bп между центрами проекций двух связок, по которым построена модель, называется базисом проектирования, и ее масштаб вычисляется по формуле:
1 |
|
bп |
. |
(62) |
|
|
|
|
|
||
t |
|
B |
|
||
Существует понятие элементы ориентирования стереопары. К ним относят рассмотренные ранее элементы ориентирования (внутреннего x0, y0, f и внешнего XS, YS, ZS, α, ω, и κ) каждого из образующих ее снимков, таким образом, общее их число 18. Если фотографирование местности с точек S1 и S2 выполнено одним и тем же АФА, то стереопара имеет 15 элементов ориентирования. Другую тройку угловых элементов внешнего ориентирования снимков на практике также используют, но значительно реже. В системах координат снимков положение точек a1 и a2 (изображений точки А местности) определяется координатами x1, y1 и x2, y2 соответственно.
4.2 ЗАВИСИМОСТЬ МЕЖДУ КООРДИНИТАМИ ТОЧКИ МЕСТНОСТИ И КООРДИНАТАМИ ЕЕ ИЗОБРАЖЕНИЯ НА ПАРЕ СНИМКОВ
Получим уравнения связи между координатами точки A местности и координатами ее изображений на паре снимков, исходя из предположения, что элементы ориентирования стереопары известны.
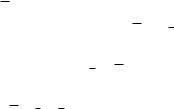
Для решения этой задачи используем в качестве исходной систему координат XYZ с началом в точке фотографирования S1 левого снимка (рис. 38). Вектор R0 определяет в этой системе положение точки фотографирования S2
правого снимка, а вектора R1 и r1 - положение точек А и ее изображения а1 на левом снимке соответственно. Точки а2 правого снимка и А местности определяют вектора r2 и R2 в системе координат S2XYZ. Ее начало находится в точке S2, а оси параллельны соответствующим осям системы координат S1XYZ. Векторы R0 , r1 и r2 известны, поскольку принято, что элементы ориентирования
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
снимков даны. Искомым является вектор R1 . |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В силу коллинеарности векторов R1 и |
|
|
имеем: |
||||||||||||||||||||
r1 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(63) |
||||
|
|
|
|
|
|
|
|
|
|
|
R1 N |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
r1 , |
||||||||||||
где N – скалярный множитель. |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Векторы R2 и |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
r2 также коллинеарны, поэтому |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r2 0. |
|
|||||||||
Согласно рис. 38 |
R2 R1 R0 или, с учётом |
уравнения коллинеарности (63), |
|||||||||||||||||||||
64
vk.com/club152685050 | vk.com/id446425943
R2 Nr1 R0. Поэтому можно записать:
(N r1 R0 ) r2 0
Решая это равенство относительно N, получим
N R0 r2 . r1 r2
Или, с учетом соотношения (63):
|
|
|
|
|
|
|
|
R0 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
r2 |
|
|
. |
|
|
|
|
||||||||
|
|
|
R |
|
|
|
|
|||||||||||||||
|
|
|
|
|
r |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
r1 |
r2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
X |
|
|
|
|
|
|
|
|
|
|
R0 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
|||||||||
S1 |
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
o2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
||
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P2 |
|
|
2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
x2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
r1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
P1 o1 a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
||
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
A
(64)
(65)
Рис.38.
Уравнение (65) - векторное Выразим искомую зависимость в
координатной форме. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
Векторные произведения векторов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
можно представить в |
||||||||||||||||||||
|
|
|
R0 и |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
r2 , r1 и r2 |
|||||||||||||||||||||||||||||||||||||||
виде определителей третьего порядка: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
j |
k |
|
|
|
|
|
|
|
|
|
|
i |
j |
k |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
R0 r2 |
BX BY BZ |
; |
|
r1 r2 |
|
|
, |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
X1 |
Y1 |
Z1 |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
X |
Y |
Z |
|
|
|
|
|
|
|
|
|
|
|
X Y |
Z |
|
|
||||||||||
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
|
|
2 |
|
|
2 |
2 |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
где i , j, k |
|
- единичные векторы координатных осей X, Y, Z; |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
BX, BY, |
BZ – координаты вектора |
R0 , |
определяющие |
|
положение точки |
||||||||||||||||||||||||||||||||||
фотографирования S2 в системе координат S1XYZ;
X1', Y1', Z1' и X2', Y2', Z2' – пространственные координаты соответственных точек а1 (вектора r1 ) и а2 (вектора r2 ) на первом и втором снимках.
Разложив определители по элементам первых строк, получим:
|
|
|
|
|
|
|
|
|
|
|
(Y Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Y Z )i |
( X Z X Z ) j ( X Y |
X Y )k , |
|||||||||||||||||||||||||||||||||
r |
r |
r |
||||||||||||||||||||||||||||||||||||||||||
1 |
2 |
1 |
2 |
2 |
1 |
|
|
2 |
1 |
|
|
1 |
2 |
1 |
2 |
2 |
1 |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
(B Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
R |
|
|
R |
B Y )i |
(B X |
B |
|
Z ) j (B |
|
Y B X )k . |
|||||||||||||||||||||||||||||||||
|
r |
X |
||||||||||||||||||||||||||||||||||||||||||
0 |
2 |
|
|
|
Y 2 |
|
Z 2 |
|
|
Z 2 |
|
|
|
2 |
|
|
|
X 2 |
|
|
Y 2 |
|||||||||||||||||||||||
Векторные произведения векторов |
|
|
|
|
|
|
есть вектора |
|
и |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
r1 и r2 , а также R0 и r2 |
|
r |
||||||||||||||||||||||||||||||||||||||||||
65

vk.com/club152685050 | vk.com/id446425943
R , направленные перпендикулярно к базисной плоскости WA. По этой причине они коллинеарны.
На основании их коллинеарности формулу (64) можно записать в виде следующих пропорций:
N |
B Z |
B Y |
|
|
B X |
B |
X |
Z |
|
B |
X |
Y |
B X |
|
|||||||
Y |
2 |
Z |
2 |
Z |
|
2 |
|
2 |
|
|
2 |
Y |
2 |
. |
(66) |
||||||
Y Z |
Y Z |
|
|
Z X Z |
|
|
|
|
|
|
|||||||||||
|
|
|
X |
|
X |
Y X Y |
|
||||||||||||||
|
1 |
2 |
2 |
1 |
|
|
|
2 |
1 |
|
1 |
2 |
|
|
1 |
2 |
2 |
1 |
|
|
|
Пространственные координаты X',Y',Z', входящие в уравнения (72), вычисляются по формулам (14-18). Составляющие базиса фотографирования определяются через линейные элементы ориентирования пары снимков:
BX X S |
2 |
X S |
, |
|||
|
|
|
|
1 |
||
BY YS |
|
|
YS |
, |
(67) |
|
|
2 |
|
1 |
|
||
|
|
|
|
|||
BZ ZS |
2 |
|
ZS . |
|
||
|
|
|
|
1 |
|
|
Спроектируем векторы R1 и r1 на координатные оси X, Y, Z. Тогда в соответствии с равенством (63) будем иметь:
X |
Y |
|
|
|
|
|
1 |
|
|
Y |
|
N X1 . |
(68) |
|
|
|
|
|
|
Z |
Z1 |
|
|
|
Рассмотренная задача определения пространственных координат точки местности по её изображению на снимках стереопары называется прямой пространственной фотограмметрической засечкой. Ее решение значительно проще для идеальной пары снимков. Случай съемки называется идеальным, если снимки получены с одной и той же высоты фотографирования, а их углы0. При указанных условиях справедливо:
X |
x 0 |
, |
Y y 0 |
, |
|
|
||
1 |
1 |
|
|
1 |
1 |
|
|
|
X |
x |
0 , |
Y |
y |
0 |
, |
(69) |
|
2 |
2 |
|
2 |
2 |
|
|||
Z |
Z |
|
f . |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
Примем, что ось X совпадает с направлением базиса фотографирования, а ось Y параллельна плоскости снимков. Тогда BZ = BY = 0, BX = B, и из второго отношения пропорции (66) имеем:
N |
|
B |
(70) |
|
|
|
. |
|
|
x 0 |
x 0 |
|
||
1 |
2 |
|
|
|
Разность абсцисс p соответственных точек, измеренных на паре снимков, называется продольным параллаксом, т.е.:
p = x1 – x2, или на идеальной паре p0 x10 x20. |
(71) |
||
Тогда |
|
|
|
N |
B |
. |
(72) |
|
|
||
|
p0 |
|
|
Подставив выражение N из (72) в (68), с учётом (69) получим:
66
vk.com/club152685050 | vk.com/id446425943
X |
|
B |
x0 |
|
Z |
x0 |
, |
|
|||||||
|
|
|
0 |
|
|
|
|||||||||
|
|
p |
1 |
|
|
|
f |
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
(73) |
||||
|
B |
|
|
|
|
|
Z |
|
|
|
|
||||
Y |
|
|
y0 |
|
y0 , |
|
|
||||||||
|
|
|
|
|
|||||||||||
|
p |
0 |
|
1 |
|
|
|
f |
1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
B |
|
f . |
|
|
|
(74) |
||||||
|
|
p0 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В соотношениях (73) |
|
и |
|
|
(74) |
|
Z H – (высоте фотографирования над |
||||||||
точкой местности). Поэтому, согласно формуле (74), параллакс p0 можно определить из соотношения:
p0 B |
f |
. |
(75) |
|
|
||
|
H |
|
|
Оно показывает, что продольный параллакс соответственных точек идеальной пары снимков равен базису фотографирования в масштабе снимков.
Формулы (69-75) справедливы и для нормального случая съемки (главные луч перпендикулярны к наклонному базису и взаимно параллельны, а угловые элементы внешнего ориентирования относительно фотограмметрической системы координат равны нулю). При этом предполагается, что ось X совпадает с базисом, а ось Z - с главным лучом левого снимка.
По паре горизонтальных снимков сравнительно просто решается задача определения превышений точек местности. Примем, что высота точки А местности известна. Тогда превышение точки М над точкой А:
h (ZM ZA ). |
(76) |
Подставив в (76) для каждой из точек выражение из (74), получим:
h |
B f ( p0 |
p0 ) |
|
||
|
m |
a |
. |
||
p0 |
p0 |
||||
|
|
||||
|
a |
|
m |
|
|
Разность продольных параллаксов pm0 pa0 обычно обозначают через p0 , поэтому, опуская индексы, можно записать:
h |
H p |
. |
(77) |
|
|
||
|
p p |
|
|
Углы наклона снимков не превышающие 3°, практически не влияют на точность определения превышений между близко расположенными точками. Поэтому формула (77) широко используется для определения высот отдельных объектов и по плановым снимкам (например, деревьев, домов, заводских труб, глубин оврагов и т.д.).
Иногда удовлетворительный результат получается при использовании
приближенной формулы: |
|
|
|
h |
H p |
, |
(78) |
b |
|
||
|
|
|
где b – базис фотографирования в масштабе снимка.
Для оценки точности определени превышения продифференцируем
67
vk.com/club152685050 | vk.com/id446425943
функцию (78) по входящим в неё переменным b, |
|
p, H и перейдём к средним |
|||||||||||||
квадратическим ошибкам. В результате получим |
|
|
|
|
|||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
m |
|
2 |
|
|
|
2 |
|
|
|||||
m |
|
|
|
m |
|
|
|
|
|
|
|||||
|
b |
|
|
|
p |
|
|
|
H |
|
|
|
, |
|
|
|
|
|
|
|
|
|
|||||||||
mh h |
b |
|
|
|
|
|
|
|
|
(79) |
|||||
|
|
|
|
p |
|
H |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где mh – средняя квадратическая ошибка определения превышений;
mb, mΔp, mH – средние квадратические ошибки определения базиса фотографирования, разности продольных параллаксов и высоты фотографирования соответственно.
На практике влиянием mb и mH пренебрегают, и для оценки используют приближённое соотношение:
m |
H |
m |
. |
(80) |
|
|
|||
h |
b |
p |
|
|
|
|
|
|
Оно показывает, что величина ошибки mh прямо пропорциональна высоте фотографирования (или фокусному расстоянию АФА, при заданном масштабе аэрофотосъемки) и обратно пропорциональна базису фотографирования.
4.3 ЭЛЕМЕНТЫ ВЗАИМНОГО ОРИЕНТИРОВАНИЯ ПАРЫ СНИМКОВ
Взаимное ориентирование снимков стереопары это установка их в положение, при котором любая пара соответственных лучей пересекается, то есть обеспечивается построение модели. Величины, определяющие такое положение снимков, называются элементами взаимного ориентирования (ЭвзО).
На практике выполнение условия пересечения соответственных лучей достигается поворотом обоих снимков или поворотами и смещениями только одного из них при неподвижном положении второго. В соответствии с этим различают две системы элементов взаимного ориентирования. В первой неподвижными считают базис фотографирования и главную базисную плоскость левого снимка; во второй – левый снимок.
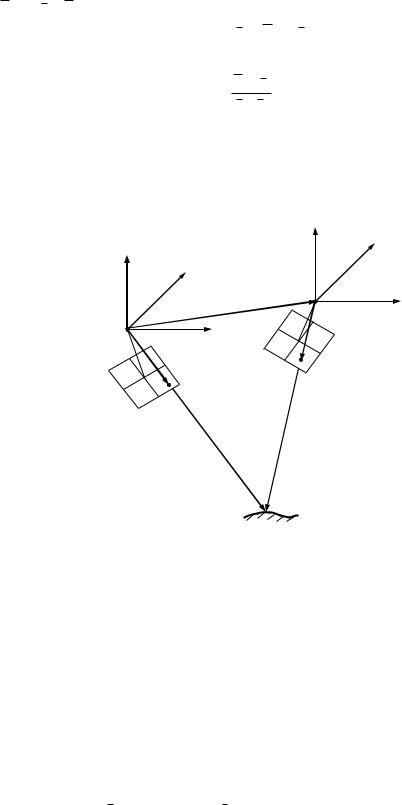
|
Первая система элементов. Начало системы координат S1X1'Y1'Z1'– в |
||||
центре проекции S1 |
левого снимка Р1 (рис. 39). Ось X1' совмещена с базисом |
||||
фотографирования, а ось Z1' установлена в главной базисной плоскости левого |
|||||
снимка. Система |
координат S2X2'Y2'Z2' |
параллельна системе координат |
|||
S1X1'Y1'Z1'. |
|
|
|
|
|
|
Элементами взаимного ориентирования являются: |
|
|
||
|
- угол в главной базисной плоскости |
левого снимка между осью |
Z1' |
и |
|
1 |
|||||
главным лучом связки; |
|
|
|
||
|
|
|
|
|
|
1 |
- угол на левом снимке между осью y1 и следом плоскости S1o1Y1 ; |
|
|
||
|
- угол в главной базисной плоскости |
левого снимка между осью |
Z2' |
и |
|
2 |
|||||
проекцией главного луча правой связки на главную базисную плоскость левого снимка;
|
- угол между проекцией главного луча правой связки на главную базисную |
|
2 |
||
плоскость левого снимка и главным лучом; |
|
|
|
- угол на правом снимке между осью y2 и следом плоскости |
|
2 |
S2o2Y2 . |
|
68
vk.com/club152685050 | vk.com/id446425943
|
|
Z1´ |
|
Y1´ |
|
|
|
Z2´ |
Y2´ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
S1 |
|
R0 |
|
|
S2 |
|
X1´, 2 |
|
|
|
|
|
||
|
|
y1 |
|
|
|
|
|
|
y2 |
|
|
|
|
|
|
|
|
|
|
χ´1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
α´2 ω´2 |
χ´2 |
|
|
|
|
|
|
||
|
|
1 |
r1 |
|
|
|
|
x2 |
|
|
|
|
|
|
||
|
|
o1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
o2 |
|
|
|
|
|
|
||
|
|
|
m1 |
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
P2 |
|
|
|
|
|
|
|||
|
|
P1 |
|
|
|
m2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.39. |
|
|
|
|
|
|
|
|
|||
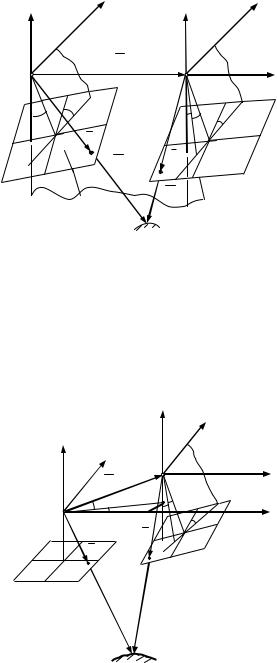
Вторая |
система |
элементов. |
|
За |
начало |
пространственной |
||||||||||
фотограмметрической системы координат принимается центр проекции левого |
||||||||||||||||
снимка S1. |
Координатные оси |
|
|
|
этой системы направлены параллельно |
|||||||||||
X1 |
, Y1 |
|||||||||||||||
соответствующим координатным осям x1, y1 |
левого снимка (рис. 40), а ось |
|
|
|||||||||||||
|
Z1 |
|||||||||||||||
совпадает |
с главным лучом |
левой |
связки. |
Система |
координат |
S |
2 |
X Y Z |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
параллельна системе координат S X Y Z . |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
1 |
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z2´ |
|
Y2´ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z1´ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y1´ |
|
S2 |
|
|
X2´ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
R0 |
BY |
S0 |
BZ |
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
ν |
|
ω |
y2 |
X1´ |
|
|
|
|
|
|
||
|
|
|
τ |
BX |
|
α |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
χ |
x2 |
|
|
|
|
|
|
|||
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
||||
|
|
|
y1 |
|
|
|
o2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
r1 |
|
|
|
m2 |
P2 |
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
o1 m1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
P1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
R2 |
|||
|
|
M |
||
Рис.40.
Элементами взаимного ориентирования являются:
- угол между осью X и проекцией базиса на плоскость X Y (или элемент |
|||||||
|
|
1 |
|
|
1 |
1 |
|
ориентирования By); |
|
|
|
|
|
||
- угол наклона базиса S1S2 относительно плоскости |
|
(или BZ); |
|
||||
X1Y1 |
|
|
|||||
|
- взаимный продольный угол наклона снимков, |
составленный осью |
|
||||
Z2 с |
|||||||
проекцией главного луча правой связки на плоскость |
|
; |
|
|
|||
X 2Z2 |
|
|
|||||
|
- взаимный |
поперечный угол наклона снимков, |
|
заключённый между |
|||
|
|
и главным лучом правой связки; |
|
|
|
|
|
плоскостью X 2Z2 |
|
|
|
|
|
||
- взаимный угол поворота снимков, угол на правом снимке между осью y2 и
69

vk.com/club152685050 | vk.com/id446425943
следом плоскости S2o2Y2.
Таким образом, каждая система включает пять элементов взаимного ориентирования. Зная их, можно по формулам (66-68) найти пространственные фотограмметрические координаты любой точки модели.
4.4 УРАВНЕНИЕ ВЗАИМНОГО ОРИЕНТИРОВАНИЯ ПАРЫ СНИМКОВ
По условию взаимного ориентирования пары снимков необходимо, чтобы для любой точки М (рис. 39 и 40) векторы r1 , r2 и R0 лежали в одной плоскости, т.е. выполнялось условие компланарности трёх векторов
|
|
|
|
|
|
|
|
|
|
|
|
(81) |
|
|
|
||
|
|
|
|
|
|
R0 (r1 r2 ) 0. |
|
|
|
||||||||
|
|
В координатной форме это условие выражается равенством нулю |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
определителя |
третьего порядка, |
составленного из |
координат векторов: R0 |
||||||||||||||
(составляющих базиса фотографирования Bx , By , Bz), |
|
|
|
|
|||||||||||||
|
|
||||||||||||||||
r1 , (координат X1 |
,Y1, Z1 ) и |
||||||||||||||||
|
|
(координат |
X |
,Y , Z ): |
|
|
|
|
|
|
|
|
|
||||
r |
|
|
|
|
|
|
|
|
|
||||||||
2 |
2 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Bx |
By |
Bz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
0. |
(82) |
|
|
|
||
|
|
|
|
|
|
|
X1 |
Y1 |
Z1 |
|
|
|
|||||
|
|
|
|
|
|
|
X |
Y |
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
|
|
|
|
|
|
||
|
|
Определитель |
(82), записанный на основе |
условия компланарности, |
|||||||||||||
может быть получен из решения уравнений коллинеарности (27), записанных для одной и той же точки местности, изобразившейся на паре снимков,
полученных с точек фотографирования S1 |
и S2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
В соответствии с этими уравнениями, связи между координатами точки |
||||||||||||||||||||||||||||||||||
местности X, Y, Z и координатами её изображения на левом |
X ,Y , Z |
и правом |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
|
X |
,Y , Z |
снимках имеют следующий вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
2 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X X S |
(Z ZS ) |
|
X |
|
|
X X S |
|
(Z ZS |
|
|
X |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
1 |
, |
|
|
|
) |
2 |
, |
|
|
|
||||||||||||||||||||
|
|
|
|
Z |
|
|
Z |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
Y Y |
|
(Z Z |
|
) |
|
Y1 |
, |
|
Y Y |
(Z Z |
|
|
) |
Y2 |
. |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
Z |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
S1 |
|
|
S1 |
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
S2 |
|
|
Z |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Поэтому: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
X S X S |
(Z ZS ) |
X |
(Z ZS |
|
|
|
X |
|
0, |
|
|
|
|
||||||||||||||||||||
|
|
|
1 |
|
) |
|
2 |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
Z |
|
Z |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Y |
|
|
Y |
(Z Z |
|
) |
|
Y1 |
(Z Z |
|
) |
|
Y2 |
0. |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
S2 |
S1 |
|
|
|
|
|
|
S1 |
|
|
Z |
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Решив первое (или второе) уравнение относительно Z и подставив результат во второе (или первое) уравнение, после преобразований запишем:
( X |
S2 |
X |
S1 |
)(Y Z |
Y Z ) (Y |
Y |
)(X Z |
X Z ) |
|||||
|
|
|
1 2 |
|
2 1 |
S2 |
S1 |
1 2 |
2 1 |
||||
|
|
(Z |
S2 |
Z |
S1 |
)(X Y X Y ) 0. |
|
||||||
|
|
|
|
|
|
|
|
1 2 |
2 1 |
|
|
||
Так как, X S |
2 |
X S |
Bx , YS |
2 |
YS |
By , ZS |
2 |
ZS |
Bz , то полученное уравнение |
|
1 |
|
1 |
|
1 |
|
70