

ФОТОГРАММЕТРИЯ
.pdfvk.com/club152685050 | vk.com/id446425943
преобразуются в фотограмметрическую систему координат. Разности между перевычисленными координатами опознаков и координатами полученными в процессе измерения не откорректированной модели (невязки в фотограмметрической системе координат), позволяют понять природу их возникновения и принять обоснованные решения по их устранению.
Воснову автоматизированного корректирования фотограмметрической модели положен хорошо известный приближенный метод основанный на
раздельном устранении невязок вначале по оси YФ, а затем XФ и ZФ. Программа предусматривает два метода выполнения этой операции: автоматический и ручной. Первый вариант является основным. Для его выполнения необходимо обеспечить стереопару как минимум тремя опознаками. Максимальное их число
–20, но три из них должны иметь, так называемое, стандартное расположение: все на дальнем плане, точка 1 вблизи главного луча правого снимка, точки 2 и 3
–соответственно у левой и правой границы стереопары. Ручное корректирование всегда выполняется по трем стандартно расположенным точкам, в случае если в процессе обработки предполагается рисовка горизонталей, а также для устранения больших невязок (более 10 м) перед автоматической корректурой.
Вцелом автоматизированная обработка снимков при наземной стереофотограмметрической съемке включает в себя следующие этапы:
1.Подготовительные работы;
2.Корректирование фотограмметрической модели;
3.Геодезическое ориентирование фотограмметрической модели (ее внешнее ориентирование);
4.Сгущение съемочного обоснования и фотограмметрическую съемку объекта.
Подготовительные работы заключаются в создании каталогов координат опознаков и базисов фотографирования, а также предварительном построении фотограмметрической модели на приборе. На экране монитора указывают имя стереопары, и заполняют таблицу с параметрами фотографирования. На отсчетных устройствах обрабатывающего прибора устанавливают значения данных из таблицы и согласовывают начальные отсчеты интерфейсного устройства с началом фотограмметрических координат прибора.
Геодезическое ориентирование осуществляется после корректирования модели простым переходом в соответствующий режим. После завершения ориентирования, на экране монитора можно получить протокол обработки стереопары. В нем будут отражены параметрами фотографирования и невязками в фотограмметрической и геодезической системах координат. Если они удовлетворяют требованиям технической инструкции, работа продолжается либо в режиме фотограмметрического сгущения сети либо в режиме фотограмметрической съемки.
В процессе съемки на экран монитора выдаются: положение измерительной марки прибора и ее геодезические координаты, редактируемая линия в белом цвете, нанесенные уже контура и элементы местности в розовом цвете, изображение цифровой модели, если она существует, в голубом цвете. Указанное изображение можно перемещать, выполнять его центровку и масштабировать. Регистрацию пикетов можно осуществлять в ручном и автоматическом режимах. Можно задавать тип регистрируемых линий, и если необходимо, их направление и т.д.
141
vk.com/club152685050 | vk.com/id446425943
В программе предусмотрены операции склеивания и фильтрации информации. Склеивание это логическая операция, в результате которой два элемента имеющие одинаковую часть заменяются одним элементом. Она обеспечивает объединение одноименных структурных элементов объекта, расположенных в зоне перекрытия съемки соседних стереопар; съемки, выполненной с различных базисов, а также при пополнении цифровой модели объекта. Эта операция осуществляется автоматически, если расхождение в положении точек перекрывающихся объектов не превосходит допусков.
Фильтрация это операция автоматического удаления избыточной информации. Параметрами фильтрации являются: минимальное и максимальное расстояние между пикетами и допустимое расстояние между исключаемой точкой и прямой проходящей через два смежных с ним пикетов. Следует заметить, что на производстве стремятся экспортировать результаты автоматизированной обработки в более развитые программные продукты, оперирующие с векторными данными, например в Автокад.
6.2.8.8 Понятие об универсальных стереоприборах аналитического типа
Как уже отмечалось, создание аналитических универсальных стереоприборов связано, прежде всего, с успехами в развитии электронновычислительной техники. Это фактически фотограмметрический комплекс, основными частями которого являются: высокоточный прибор для измерения снимков (то есть той или иной конструкции стереокомпаратор), быстродействующая управляющая ПЭВМ, графопостроитель, программное обеспечение и различные сервисные устройства.
Измерительный прибор связан с ПЭВМ с помощью датчиков и аналогоцифровых преобразователей. Важная особенность – существование между ними обратной связи, необходимой для дифференциальных перемещений снимков с целью устранения поперечных параллаксов. Осуществляются эти перемещения приводными двигателями, которые и управляются ПЭВМ. Программное обеспечение должно включать фотограмметрические модули для внутреннего и взаимного ориентирования снимков, внешнего ориентирование модели, а также пакеты, обеспечивающие регистрацию координат в процессе измерений модели, поддержку файлов данных (например, каталога координат, цифровой модели местности и рельефа и т.д.), пакет прикладных программ. Хорошо, когда программное обеспечение открыто для программ пользователя. Следует отметить, что приборы аналитического типа обеспечивают наивысшую точность картографирования по снимкам, так как для измерений используются высокоточные стереокомпараторы, и нет ограничений на учет факторов, которые приводят к искажениям изображений. Важно, чтобы их влияние было записано аналитически.
Основные процессы при обработке снимков:
-Загрузка исходных данных в ПЭВМ и установка снимков на каретках снимкодержателей;
-Внутреннее ориентирование, которое сводится к выполнению измерений на координатных метках или на крестах, если впечатана сетка. Результат – параметры, позволяющие пересчитывать фиксируемые в процессе измерений отсчеты в фотокоординаты;
-Взаимное ориентированиек снимков. Оно заключается в измерении координат не менее чем на 5 соответственных точках. На самом деле точек берут больше,
142
vk.com/club152685050 | vk.com/id446425943
и их расположение не обязательно должно быть стандартным. Результат – элементы взаимного ориентирования, используемые для вычисления смещений снимков, осуществляемых приводными двигателями. Если ориентирование выполнено корректно, то поперечный параллакс будет отсутствовать при наведении на любую пару соответственных точек (то есть будет построена модель);
-Внешнее ориентирование модели состоит в измерении координат опознаков и вычислении матрицы преобразования. Важной характеристикой качества построенной модели и результатов внешнего ориентирования являются остаточный поперечный параллакс и невязки на опознаках.
-Измерение модели и составление плана начинают после согласования систем координат модели и основы распложенной на столе графопостроителя.
Перед выполнением того или иного процесса с помощью меню в оперативную память ПЭВМ загружается соответствующий пакет. На современных ПЭВМ возможна и параллельная обработка результатов измерений (например, составление плана и создание цифровой модели).
Изготовителей аналитических приборов рассматриваемого типа много. Отмечается тенденция к производству недорогих систем по возможности полностью интегрированных в Географическую информационную систему (ГИС). Почти в каждой модели реализовано оптическое наложение данных, то есть, возможно совмещение стереомодели с твердой копией.
Из аналитических приборов особенно хорошо известны Планикомпы фирмы Оптон (Германия). Существуют две их серии: C100, C110, C120, C130 и C140, а также P1, P2 и P3. Вторая серия имеет комплексное математическое обеспечение PHOCUC. Оно обеспечивает фототриангулирование по способу связок, построение ЦМР при различных вариантах выбора точек, выполнение операций картосоставления в режимах on line и off line, формирование базы данных ГИС с объектно-ориентированной структурой, позволяющей осуществлять анализ данных по тематическим критериям, выполнять обработку наземных и спутниковых снимков.
Известны серия приборов DSR Фирма Kern (Швейцария), приборы:Wild BC3, APY, S9-AP, RAP (Wild Швейцария), SD2000 (Leika Швейцария),
Дигикарт 40 (Италия) и т.д.
Вприборе TRASTER фирмы MATRA (Франция) снимки проецируются на один экран в поляризованном свете, что позволяет через очки наблюдать модель сразу нескольким специалистам.
Класс малогабаритных приборов упрощенной конструкции производился Австралийской фирмой ADAM Technologi, это G2, G3 –стереокорды, G3/PC? ASP – 2000.
Внашей стране был сконструирован и используется на производстве прибор аналитического тип Анаграф.
6.2.9 ОСОБЕННОСТИ ЦИФРОВОГО ТРАНСФОРМИРОВАНИЯ И СОСТАВЛЕНИЯ ФОТОПЛАНА (МИХАЙЛОВ А.П.)
6.2.9.1Назначение и области применения цифрового трансформирования
снимков
Трансформированием снимков может выполняться и цифровыми методами. Основными областями его применения являются топография и картография.
143
vk.com/club152685050 | vk.com/id446425943
При создании и обновлении карт различного назначения по аэрокосмическим снимкам создаются трансформированные изображения местности в проекции карты. Эти изображения могут быть созданы по одиночным снимкам или по нескольким перекрывающимся снимкам. Цифровое трансформирование выполняется с точностью, соответствующей точности предъявляемой действующими нормативными документами к точности карт соответствующего масштаба.
Цифровые трансформированные изображения используют для создания контурной части карт, путем векторизации цифровых изображений в среде CAD или ГИС, а также как самостоятельные картографические документы. В частном случае, если при трансформировании снимков не учитываются влияние кривизны Земли и проекция карты на положение контуров, трансформированное изображение представляет собой ортогональную проекцию местности на горизонтальную плоскость. Такой вид трансформирования называется ортотрансформированием.
Помимо топографии и картографии, цифровое трансформирование используется для создания по исходным снимкам перспективных изображений местности из заданных точек пространства. Такие изображения используют в военной области, например, в летных тренажерах и в архитектуре - при проектировании различных сооружений. Применяется оно также для преобразования стереопар исходных снимков в стереопару снимков идеального случая съемки в системе координат фотограмметрической модели. Такое преобразование выполняется в цифровых стереофотограмметрических системах.
Процесс цифрового трансформирования состоит из двух этапов. На первом этапе процедура геометрического трансформирования создает «бланк» подходящего размера и устанавливает масштаб (размер пиксела). На втором - определяются пиксельные значение (плотности) каждого пиксела трансформированного изображения. С этой целью, изменяются параметры геометрического трансформирования каждого выводимого пиксела, для того чтобы определить его положение в системе координат строк и столбцов исходного растрового изображения.
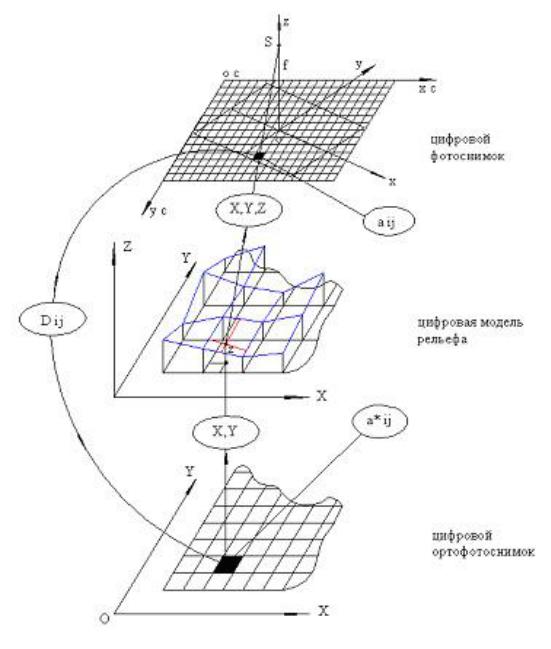
Принципиальная схема цифрового ортотрансформированния снимков представлена на рис.76. Исходными материалами при цифровом ортотрансформировании снимков служат: цифровое изображение исходного фотоснимка; цифровая модель рельефа (в большинстве случаев используется регулярная сетка ЦМР в виде сетки квадратов на местности); элементы внутреннего и внешнего ориентирования снимка; параметры внутреннего ориентирования снимка в системе координат цифрового изображения.
Основными процессами ортотрансформирования являются:
-Формирование «бланка».
-Определение плановых геодезических координат центров каждого пиксела «бланка».
-Вычисление высоты каждого центра.
-Вычисление координат изображений центров в плоской прямоугольной системе координат исходного снимка.
-Преобразование их в систему координат цифрового изображения.
-Вычисление оптических плотностей пикселов «бланка».
144
vk.com/club152685050 | vk.com/id446425943
Рис.76
«Бланк» - прямоугольная матрица цифрового ортоснимка, строки и столбцы которой параллельны осям X и Y геодезической системы координат. Координаты одного из ее углов заданы в этой же системе координат. Размер элементов (пикселов) матрицы обычно принимается равным приближенной величине ×m, в которой:
-- размер пиксела цифрового изображения исходного снимка;
-m - знаменатель среднего масштаба снимка.
Значения координат угла создаваемой матрицы выбирают кратными величине ее элементов.
По значениям индексов i и j элементов матрицы a ij определяют координаты X, Y центра соответствующего пиксела цифрового ортоснимка в геодезической системе координат. Значения Zi находят методом билинейного иинтерполирования.
145
vk.com/club152685050 | vk.com/id446425943
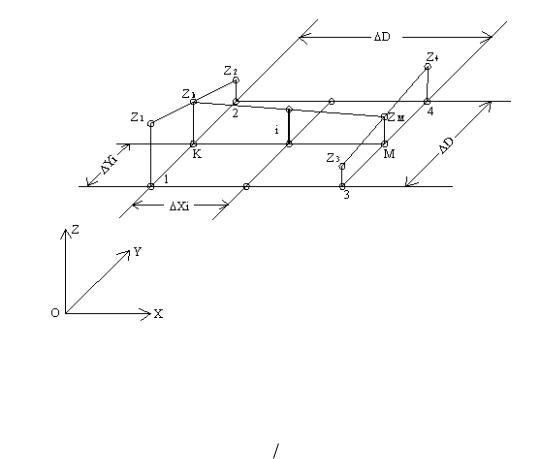
Рис.77
На рис.77 X = Xi - X1, а Y= Yi - Y1, где X1 и Y1 - координаты узла 1 цифровой модели рельефа. Высоту точки Zi вычисляют по формуле:
|
|
Zi ZK |
ZM |
ZK D X i , |
|
|
(160) |
||||||
в которой: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
Z |
Z2 Z1 |
Y , |
Z |
|
Z |
|
|
Z4 Z3 |
Y |
||
|
K |
1 |
|
D |
i |
|
M |
|
3 |
|
D |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|||
По координатам Xi, Yi, Zi и значениям элементов внутреннего и внешнего ориентирования снимка определяют координаты х,у соответствующей точки на исходном цифровом снимке в системе координат снимка Sхуz. При этом:
x x f |
x * |
, |
|
y y f |
y * |
|
|||
|
|
|
|
(161) |
|||||
0 |
z * |
|
|
|
0 |
z * |
|||
|
|
|
|
||||||
|
|
|
|
|
|
||||
где: |
|
|
|
|
|
|
|
|
|
|
x * |
|
X X S |
|
|||||
|
|
|
A |
T |
YS |
|
|
||
|
y * |
Y |
. |
|
|||||
|
|
|
|
|
Z S |
|
|
||
|
z * |
|
Z |
|
|
||||
По координатам х,у и значениям параметров внутреннего ориентирования цифрового изображения вычисляют координаты точки снимка в системе координат цифрового изображения осхсус. В случае использования аффинных преобразований при выполнении внутреннего ориентирования, для этого используют формулы:
146
vk.com/club152685050 | vk.com/id446425943
X |
C |
|
P 1 |
x a |
0 |
|
A |
|
|
|
|
1 |
|||
YC |
|
y b0 |
B1 |
||||
A2 |
|
|
x a0 |
|
|
|
|
|
|
B2 |
|
y b0 |
|
|
Затем по координатам хc и уc вычисляют пиксельные координаты точки:
xp = xc/ , yp = yc/ .
Используя xp,yp точки цифрового изображения снимка, являющейся проекцией центра пиксела матрицы цифрового ортоснимка, находят ближайшие к этой точке четыре пиксела цифрового изображения снимка. Далее, методом билинейной интерполяции по формулам (8) определяют значение оптической плотности Di или цвета, присваиваемого соответствующему пикселу матрицы цифрового ортоснимка. При этом значение величин хp, yp определяют по формулам:
xp = xpi – xpk, yp = ypi – ypk.
Таким же образом определяются оптические плотности и цвет всех остальных пикселов цифрового ортоснимка.
В Талке задача получения трансформированного изображения решается несколько иначе. В программе есть разделе «параметры расчета фотоплана», в котором предлагается задать параметр, «точность преобразования», Этот параметр определяет число трансформационных зон, на которое делится снимок. Причем, по умолчанию он равен 128x128. Это означает, что каждый фотоснимок разбивается 128 вертикальными и 128 горизонтальными полосами на 16384 зон, в каждой из которых используется свой закон преобразования снимка при создании фотоплана. На самом деле зон даже несколько больше, поскольку каждая определяемая точка, поставленная оператором, участвует в разбиении на зоны как вершина. Сводка на границах зон гарантируется, поэтому увеличение их числа грозит только увеличением времени расчетов и тем, что увеличение параметра «точность преобразования» ведет к существенному расширению используемого для промежуточных расчетов дискового пространства. В точки каждой зоны снимка можно ввести поправки за искажения на снимке, за наклон оптической оси и за рельеф, для чего используются задачи: «ошибки снимка», «рельеф местности» и «наклон оптической оси»».
Указанный выше учет следует выполнять по мере надобности. Так, например, «рельеф местности» следует учитывать только, если проводился расчет рельефа для каждой стереопары, выполнялась блочная фототриангуляция и создавалась единая ЦМР (либо для расчетов использовали ЦМР, созданную по картографической информации).
Аналогично, «ошибки снимка» следует включать, если был проведен расчет в задаче «ошибки снимка». Задача «наклон оптической оси» выполняется, если проводилась блочная фототриангуляция, но рельеф местности не строился и не использовался для расчетов (технология построения фотопланов для равнинных местностей). При расчетах смещения точек снимка из-за влияния рельефа наклон оси и так учитывается, поэтому задачу «наклон оси» выполнять не следует.
Отметим, что в программе оператору предлагается выбор конечной продукции между «фотосхемой», «фотопланом» и «ортофотопланом». Он тесно связан с только что рассмотренными параметрами. Так, выбор «фотосхемы» автоматически означает отключение задач учета рельефа и наклона оси. Выбор «фотоплан» означает учет наклона оси, а выбор «ортофотоплан» равносилен автоматическому включении задачи по учету
147
vk.com/club152685050 | vk.com/id446425943
рельефа.
В программе предлагается довольно богатый выбор значений параметра «точность преобразования», (от 2х2 до 1024х1024). В горных районах и для снимков мелкого масштаба, возможно, следует устанавливать параметры более 128, например, 512. Для равнинных местностей и для снимков крупного масштаба можно уменьшить число зон до 32х32.
Для задачи «ошибки снимка» никогда не бывает нужно значение больше, чем 128. Для задачи «смещение за рельеф» желательно, чтобы значение параметра «точность преобразования» было не меньше, чем отношение (размер снимка на местности в метрах)/(шаг матрицы единой ЦМР), т.е. чем число пикселей единой ЦМР, лежащих на стороне снимка. Обычно 128 бывает достаточно. Расчет «ошибок снимка» с одним значением параметра, а «геометрии» с другим, является допустимым и не приводит к ошибке. В то же время не стоит при расчете геометрии брать значение параметра «точность преобразования» меньше, чем при расчете смещения за рельеф: это будет означать, что при расчете смещения за рельеф записана лишняя информация, которая потом не используется. Аналогично, если в задаче «смещение за рельеф» точность преобразования меньше, чем число пикселей единой ЦМР, лежащих на стороне снимка, то это значит, что создана излишне подробная единая ЦМР.
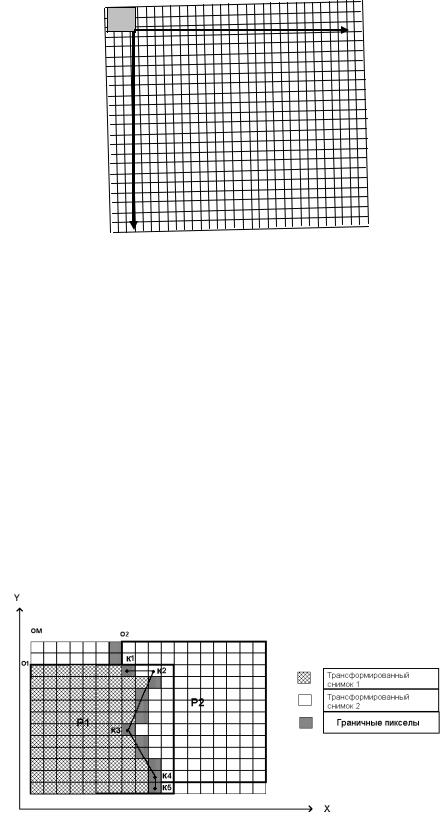
Как указывалось выше, ортофотоснимок это растровое фотоизображение, полученное на основе одного из исходных изображений стереопары путем его трансформирования в ортогональную проекцию. Делают это только после построения единой ЦМР (пространственной сети TIN). Поэтому задача «Смещение за рельеф», например в Талке, обязательно выполняется для каждого фотоснимка проекта, который участвует в создании ортофотоплана, если создавалась ЦМР и есть желание учесть смешение точек фотоснимка из-за влияния рельефа при создании фотоплана. Смещения точек фотоснимка из-за влияния рельефа хранятся в виде сетки трансформационных зон во внутреннем формате программы. Ее размерность устанавливается по значению параметра «Задача»/«Фотоплан»/ «Параметры процесса построения фотоплана»/«Точность преобразования». Не следует забывать, при создании фотоплана, поставить флаг «Учитывать искажения за рельеф» для использования этой сетки. При ее вызове на экран дисплея появляется примерно такая картинка (Рис. 78). Если сетка смещений за рельеф очень сильно искривлена или растянута в каком-то месте, то обычно это означает, что в единой ЦМР присутствуют ошибки («ступенька» или «выброс»). Появление сообщения об ошибке обычно означает, что «модель рельефа не может быть однозначно спроектирована на плоскость данного снимка». Это бывает, например, когда на ЦМР есть настолько крутые склоны или глубокие овраги, что они не видны на снимке. Такие явления обычны и при плохом качестве (грубых ошибках) ЦМР стереопар, по которым строилась единая ЦМР.
В некоторых экзотических случаях, при крупномасштабной съемке и большой площади залета, возможна ситуация, когда из-за наклона плоскости снимка часть ЦМР оказывается «за спиной». Это тоже приводит к ошибке. В этом случае остается только создать несколько ЦМР с рамками меньшего размера, и рассчитывать смещения за рельеф для части снимков по одной, а для другой части снимков – по другой ЦМР.
148
vk.com/club152685050 | vk.com/id446425943
D
Y
X
Рис. 78 Вид сетки трансформационных зон
При фотографировании местности, на которой расположены высокие объекты (например, здания) возникает задача «Сдвиг объектов». Если ее не решать, то на фотоплане, рассчитанном программой, крыша дома будет смещена по отношению к основанию. В этом случае и ортофотоплан нельзя считать строгим. Для решения задачи те крыши домов, которые предполагается смещать должны быть соответствующим образом помечены. После ее решения они будут смещены на их основания в соответствии с рельефом. Образовавшиеся «мертвые зоны» (области, которые не были видны на том снимке, с которого дом был взят на исходный фотоплан) будут заполнены с других снимков проекта.
6.2.9.2 Создание цифровых фотопланов (Михайлов)
Цифровые фотопланы могут быть созданы по перекрывающимся цифровым трансформированным снимкам. На рис.79 представлен принцип формирования цифрового фотоплана. Для его создания используются
Рис.79
трансформированные снимки с одинаковым размером пикселов и имеющие координаты начал систем координат цифровых изображений O1 и O2 кратные размеру пиксела.
149
vk.com/club152685050 | vk.com/id446425943
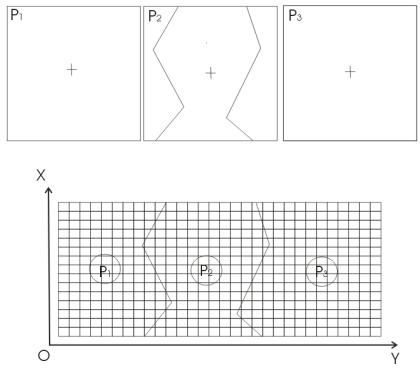
При создании цифрового фотоплана в зоне перекрытия трансформированных снимков проводят линию пореза в виде полилинии с узлами Ki. Затем, с ее помощью в каждой строке определяют граничные пикселы, совмещенные с линией пореза, и приступают к формированию матрицы цифрового фотоплана.
Координаты начала системы координат цифрового фотоплана XOM принимаются равными наименьшему значению координат XO1 и XO2 начал систем координат цифровых трансформированных снимков, а YOM – наибольшему значению координат YO1 и YO2 .
Каждая строка матрицы фотоплана формируется из строки трансформированного снимка P1, включая граничный пиксел и строки снимка P2, начиная с пиксела, следующего за граничным. Таким методом можно присоединить к созданному фотоплану другие перекрывающиеся снимки.
Цифровые фотопланы могут быть созданы путем формирования матрицы цифрового фотоплана непосредственно по всем перекрывающимся цифровым снимкам. На рис.80 иллюстрируется процесс формирования цифрового фотоплана этим методом.
В рассматриваемом методе на перекрывающихся цифровых изображениях снимков проводят линии пореза, которые представляют собой полилинии. По координатам узлов полилинии в системе координат цифрового снимка определяют координаты проекций узлов полилинии на цифровом фотоплане в системе координат объекта и формируют полилинии на цифровом фотоплане.
исходные цифровые снимки
цифровой фотоплан
Рис.80
По этим полилиниям определяют граничные пикселы, которые формируют границы участков цифрового фотоплана, формирование которых
150