

Министерство высшего и профессионального образования
Государственное образовательное учреждение высшего профессионального образования
Самарский Государственный Технический университет
Факультет автоматики информационных технологий
Кафедра «Автоматика и управление в технических системах»
Лабораторная работа № 803 Исследование основных режимов работы двигателей постоянного тока.
Выполнила:
студентка
3-АИТ-10
Проверил:
Михеев А.Г.
Самара 2011
Цель работы: изучение основных характеристик и режимов работы двигателей постоянного тока (ДПТ)
1Схема лабораторного макета
Общая принципиальная схема лабораторного макета имеет вид:
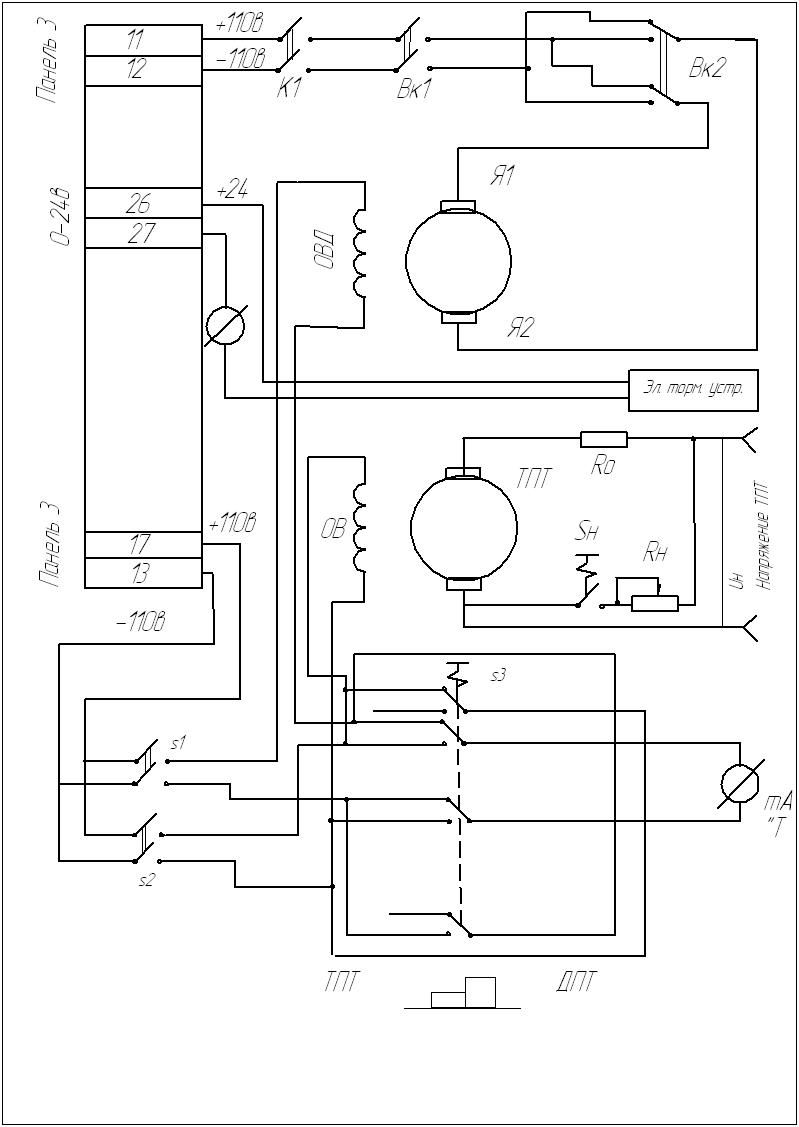
Рисунок 1 – Общая принципиальная схема
2Основные сведения о дпт
Двигатель постоянного тока — электрическая машина, предназначенная для преобразования механической энергии в электрическую постоянного тока (генератор) или для обратного преобразования (двигатель).
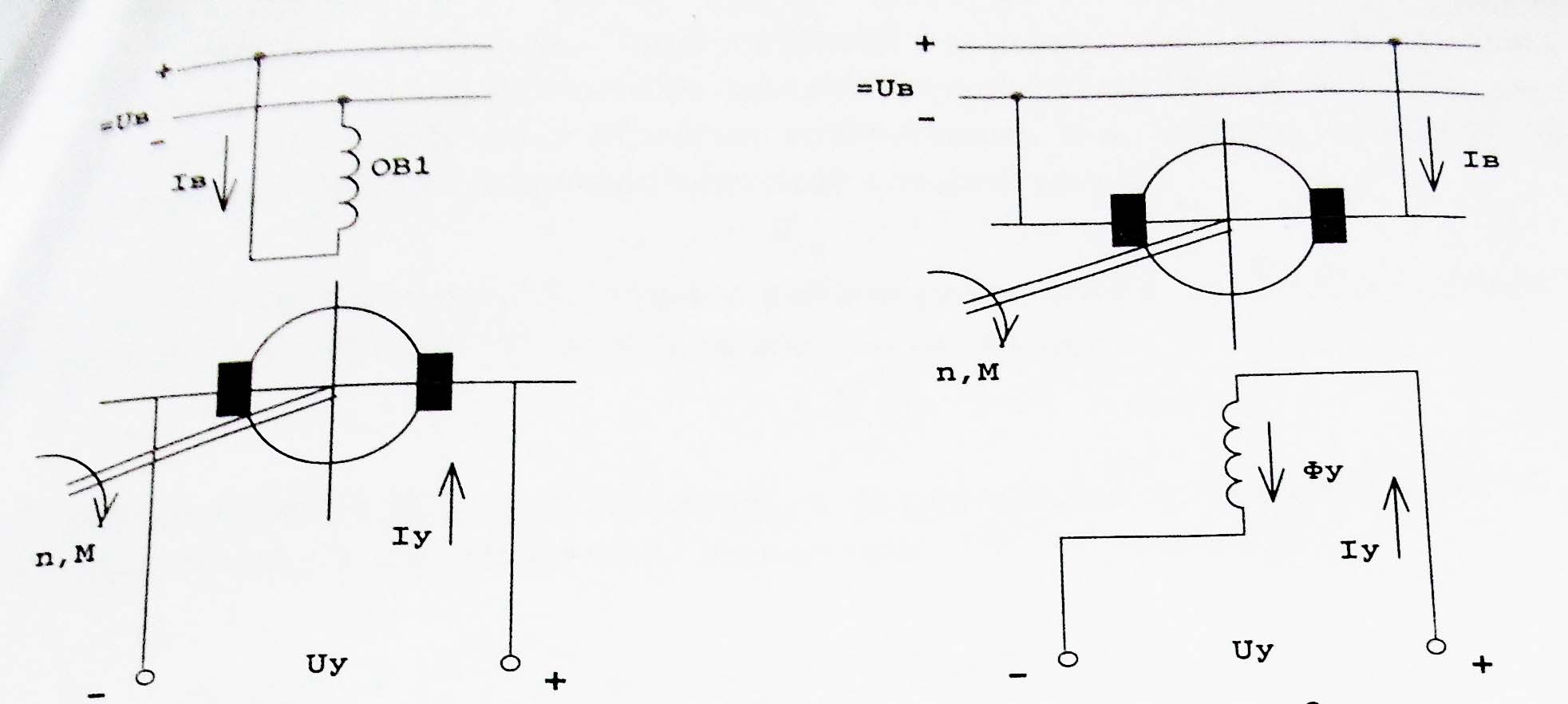
Рисунок 2 - Управление скоростью вращения ДПТ (слева – при независим. возбужд, справа – со стороны обмотки возбужд.)
При якорном управлении обмотка возбуждения
подключена на постоянное напряжение
(![]() )
и по ней протекает ток
)
и по ней протекает ток
![]() ,
который и формирует общий поток
возбуждения
,
который и формирует общий поток
возбуждения
![]() .
Магнитная цепь статора имеет ярко
выраженные полюса, через которые проходит
этот поток. Если теперь на обмотку якоря
подать входной сигнал, то под его
действием через нее будет протекать
ток
.
Магнитная цепь статора имеет ярко
выраженные полюса, через которые проходит
этот поток. Если теперь на обмотку якоря
подать входной сигнал, то под его
действием через нее будет протекать
ток
![]() =
=![]() .
.
Как известно, на проводник с током,
который помещен во внешнее магнитное
поле, действует выталкивающая сила
пропорциональная среднему значению
индукции этого поля (![]() )
и величине тока этого проводника (
)
и величине тока этого проводника (![]() ),
т.е
),
т.е
![]() ,
где
,
где
![]() - длина проводника.
- длина проводника.
Данная сила приложена к верхней поверхности якоря, где в его пазах размещены проводники обмотки якоря. Следовательно, можно говорить о появлении момента вращения, который возрастает с ростом числа проводников:
 (1)
(1)
где N – число проводников
обмотки якоря, находящихся под током,
а D – приведенное значение
диаметра якоря, определяющее плечо для
выталкивающей силы
![]() .
.
Если через весь якорь протекает ток , то через его один проводник величина тока определяется как
![]() ,
,
где
![]() - число параллельных ветвей обмотки
якоря.
- число параллельных ветвей обмотки
якоря.
В результате, общее значение электромагнитного момента вращения определяется выражением:
 (2)
(2)
где S – площадь поперечного сечения полюсного наконечника, через который проходит поток возбуждения. Ее величина равна:
 (3)
(3)
где р – число пар полюсов магнитной цепи двигателя. С учетом выражения (3) получим:
 (4)
(4)
В этом выражении коэффициент
![]() ,
определяемый конструктивными параметрами
двигателя, получил название механического
коэффициента или константы двигателя.
,
определяемый конструктивными параметрами
двигателя, получил название механического
коэффициента или константы двигателя.
Если момент вращения, определяемый выражением (4), превышает момент сопротивления нагрузки, то якорь придет во вращение. Витки обмотки якоря начнут пересекать магнитное поле обмотки возбуждения и в каждом активном проводнике индуцируется ЭДС, мгновенное значение которой равно:
 (5)
(5)
где
![]() - окружная скорость якоря в районе
размещения этого проводника. Ее можно
выразить через угловую скорость вращения
(n) якоря:
- окружная скорость якоря в районе
размещения этого проводника. Ее можно
выразить через угловую скорость вращения
(n) якоря:
 (6)
(6)
Во внешнюю цепь якоря коммутируется не единичный проводник, а [N] –проводников, поэтому возрастает и величина ЭДС обмотки якоря:
![]() (7)
(7)
где
![]() =
=![]() - постоянный коэффициент, получивший
название скоростного коэффициента МПТ.
- постоянный коэффициент, получивший
название скоростного коэффициента МПТ.
Полученная ЭДС обмотки якоря через его
щетки передается во внешнюю цепь, для
которой справедливо выражение:
![]() ,
где
,
где
![]() -
активное сопротивление цепи якоря, а Е
– величина ЭДС, определяемая выражением
(7).
-
активное сопротивление цепи якоря, а Е
– величина ЭДС, определяемая выражением
(7).
Подставляя значение ЭДС и учитывая, что
угловая скорость вращения якоря
ω[рад/сек] связана с этой же величиной
n[об/мин] соотношением: ω=
![]() ,
последнее уравнение перепишем в следующем
виде:
,
последнее уравнение перепишем в следующем
виде:
![]() (8)
(8)
Решая уравнение (8) относительно угловой скорости вращения якоря ω, получим:
 (9)
(9)
где
![]() -
по-прежнему воспринимается как скоростной
коэффициент двигателя.
-
по-прежнему воспринимается как скоростной
коэффициент двигателя.
Уравнение (9) – упрощенное уравнение
механической характеристики двигателя.
Задаваясь различными значениями
![]() ,
мы получим семейство механических
характеристик. Их общий вид показан на
рисунке 3.
,
мы получим семейство механических
характеристик. Их общий вид показан на
рисунке 3.
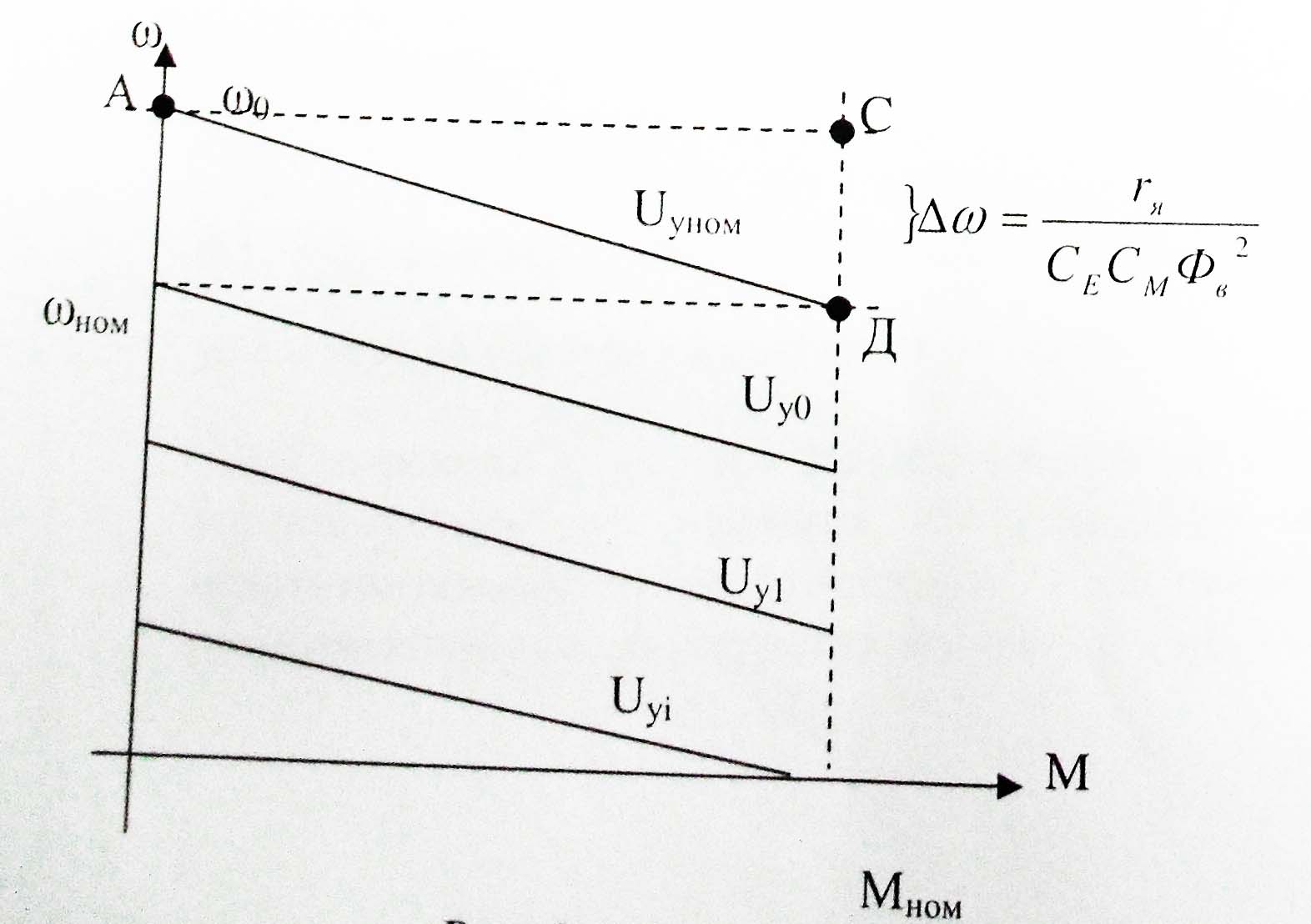
Рисунок 3 – Семейство механических характеристик
Все характеристики имеют одинаковый наклон, т.е. одну и ту же жесткость. Начало каждой из них определяется режимом холостого хода, когда Мном=0 (точка на оси ординат, например для UУ=Uном – это точка А).
Величина скорости холостого хода ω0 определяет начало рабочего участка механической характеристики. С ростом нагрузки реальная скорость вращения падает и при ее номинальном значении М= Мном получим нижнюю границу рабочего участка в точке Д, для UУном.
Общее снижение скорости на этом участке
∆ и будет определять жесткость механической
характеристики.
и будет определять жесткость механической
характеристики.
Для управления ее значением можно рекомендовать изменение величины сопротивления [ ] цепи якоря двигателя, например, за счет введения в эту цепь добавочных сопротивлений. Это делает характеристику более мягкой, увеличивая ее наклон. При этом скорость холостого хода двигателя сохраняется неизменной. Влияние сопротивления цепи якоря на механическую характеристику показано на рисунке 4.
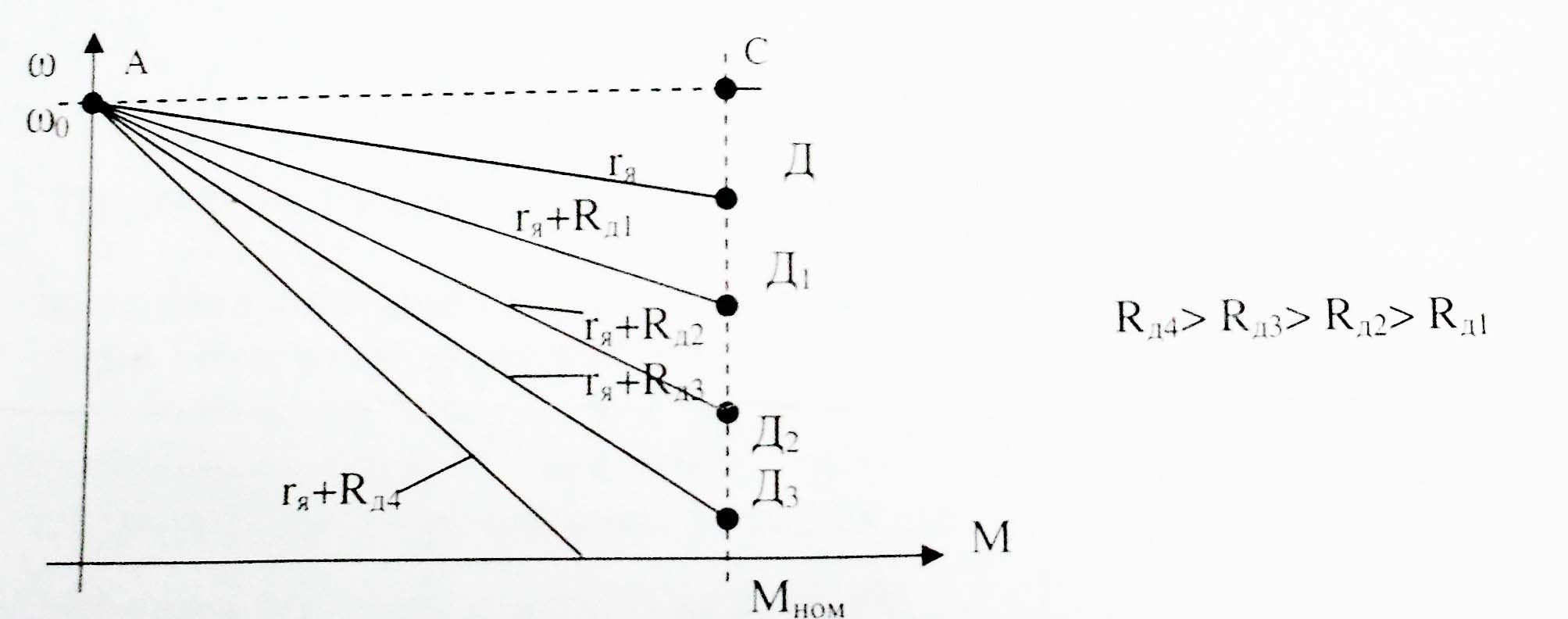
Рисунок 4 - Влияние сопротивления цепи якоря на механическую характеристику
Анализ этих характеристик показывает, что введением в цепь якоря добавочного сопротивления можно управлять его скоростью. Подобный способ управления скоростью вращения двигателя получил название параметрического.
Его основной недостаток в том, что он предусматривает лишь снижение скорости вращения и уменьшает жесткость характеристики.
Более предпочтительно управление скоростью вращения за счет изменения амплитуды управляющего сигнала. Этому способу управления соответствует семейство входных или регулировочных характеристик, представляющих собой зависимость ω=f(UУ) при Мном i=const. Для их получения достаточно в уравнении (9) полагать, что MЭМ=Мном=const, и построить зависимость ω=f(UУ) при
Мном i=const. Например, для режима холостого хода ,когда MЭМ=Мном=0, уравнение начальной характеристики примет вид
 (11)
(11)
При переходе к другим значениям момента в диапазоне от 0 до Мном наклон характеристики не меняется, а происходит ее смещение и появляется зона нечувствительности по отношению к входному сигналу. Общий вид семейства регулировочных характеристик показан на рисунке 5.

Рисунок 5 - Общий вид семейства регулировочных характеристик
Зона нечувствительности, в виде напряжения
трогания, может доходить до 50% от UУном
при максимальном значении момента
нагрузки на выходном валу двигателя.
Наклон характеристики определяется
коэффициентом
![]() ,
который показывает чувствительность
двигателя к входному сигналу.
,
который показывает чувствительность
двигателя к входному сигналу.
Важна также характеристика быстродействия, с которым будет происходить отработка входного сигнала. Быстродействие оценивается по виду ПФ двигателя, которая имеет вид:
 (12)
(12)
Механическая постоянная времени
![]() ,
где J – момент инерции
всех подвижных масс, приведенных к валу
двигателя, составляет уже десятые доли
секунды.
,
где J – момент инерции
всех подвижных масс, приведенных к валу
двигателя, составляет уже десятые доли
секунды.
Основные коэффициенты ПФ могут быть определены из паспортных данных двигателя:

Из общего уравнения двигателя (9) можно
увидеть, что помимо якорного уравнения,
для изменения его скорости вращения
можно использовать и второй метод, когда
поток возбуждения
![]() не остается фиксированным, а становится
входным сигналом управления. В этом
случае, при сохранении общего принципа
работы ДПТ меняется вид его основным
статических характеристик. Для удобства
их рассмотрения введем нормирование
для основных величин этих характеристик.
Это позволит представить семейство
механических и входных характеристик
для полюсного управления двигателя в
следующем виде:
не остается фиксированным, а становится
входным сигналом управления. В этом
случае, при сохранении общего принципа
работы ДПТ меняется вид его основным
статических характеристик. Для удобства
их рассмотрения введем нормирование
для основных величин этих характеристик.
Это позволит представить семейство
механических и входных характеристик
для полюсного управления двигателя в
следующем виде:
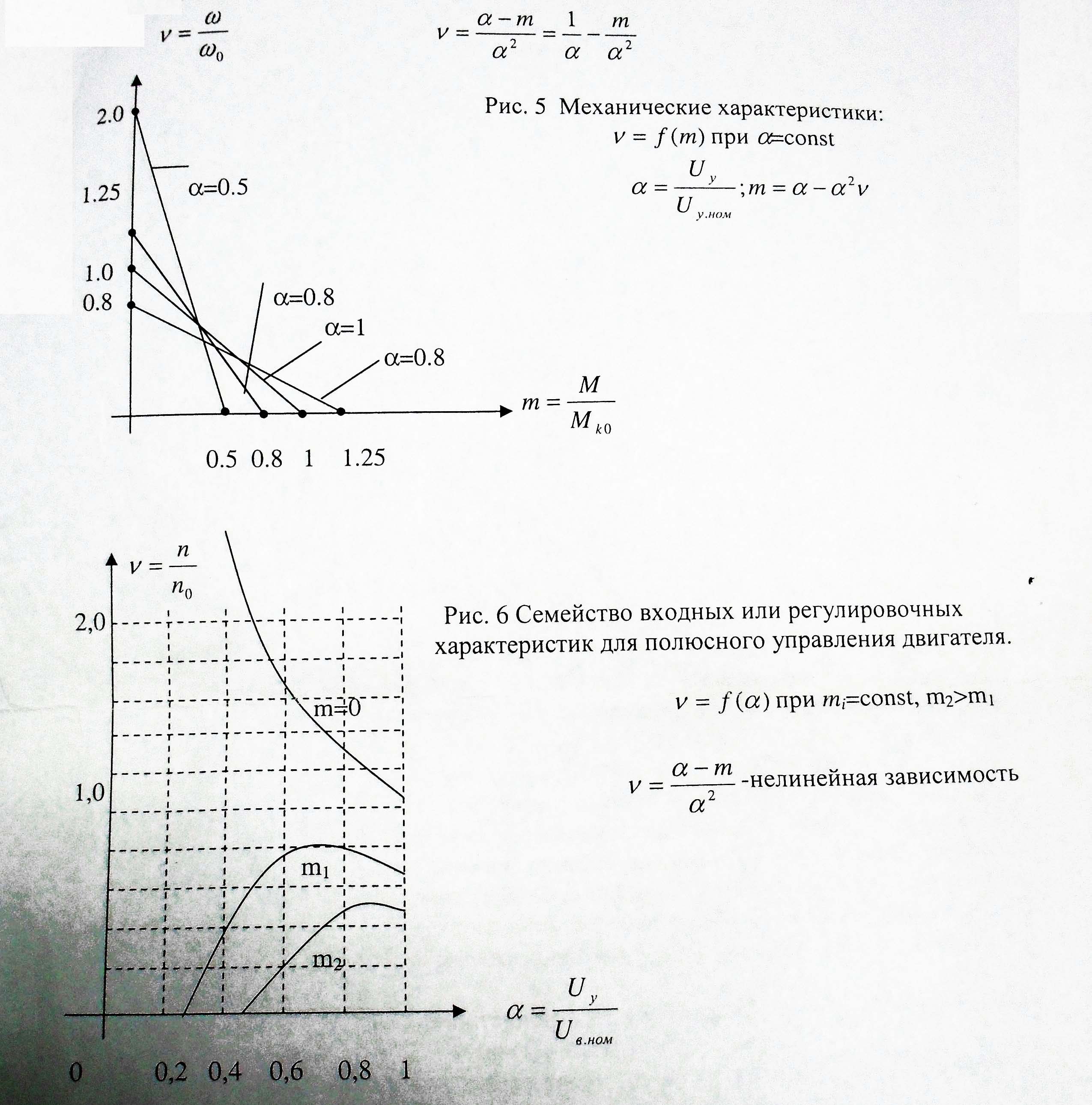
Для ДПТ играет роль не только вид исследуемой характеристики, но и способ управления его работой.