Как организуется микроконтроллерное управление с позиций теории надежности.
Микроконтроллерное управление с позиций теории надежности может быть организовано (рис. 1.6) одним из следующих способов: а) управление с конвейерной (последовательной) обработкой информации; 6) управление с параллельной обработкой информации; в) мажоритарное управление. Определим для них коэффициент готовности [167]. Коэффициент готовности микроконтроллерной системы определяется по формуле
У=Тср/Т0,
где Тср — среднее время нахождения систем в работоспособном состоянии; Т0 — общее время работы системы. Если обозначить К/ коэффициент готовности /-го микроконтроллера, то коэффициент готовности системы для каждого из трех способов организации микроконтроллерного управления составляет соответственно [231]
Опишите структуру микропроцессорной цифровой САУ при работе микропроцессоров на одну общую шину.
И 13. Приведите примеры возможных вариантов топологии многомашинных САУ.




Опишите типовую структуру одноконтурной САУ.
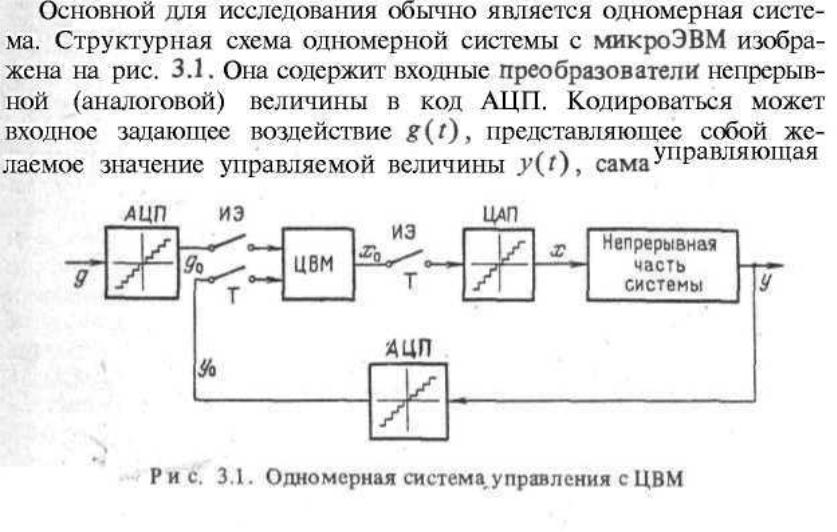
Автоматические системы с перестраиваемой структурой. 1ипо-вая структура одноконтурной САУ содержит аналого-цифровые преобразователи АЦП! и АЦП2, цифро-аналоговый преобразователь ЦАП, микроЭВМ и непрерывную часть системы (рис. 1.9) [23]. Кодироваться в АЦП может входное задающее воздействие % (г), представляющее собой желаемое значение управляемой величины у к г), управляемая величина, а также другая поступающая извне информация. В результате такого кодирования на вход микроЭВМ в дискретные моменты времени поступают цифровые представления этих величин go * Уо- При жесткой программе обслуживания каналов период дискретности оказывается обычно постоянным. При обслуживании по гибкой программе период дискретности оказывается случайной величиной с некоторым математическим ожиданием и дисперсией. В последнем случае виртуальная структура САУ оказывается переменной: она перестраивается под управлением программы в зависимости от меняющихся условий управления.

Опишите виртуальную структуру адаптивной сау.

В последнем случае виртуальная структура САУ оказывается переменной: она перестраивается под управлением программы в зависимости от меняющихся условий управления.
Примером САУ с перестраиваемой структурой может быть адаптивная система, работающая с нестационарным сигналом g (г): корреляционная функция этого сигнала зависит от времени. В этом случае период дискретности Т сигнала £ (г) должен быть переменным. Виртуальная структура САУ для рассматриваемого примера показана на рис. 1.10 [23]. В системе реализованы несколько алгоритмов управления АУ1( АУ2,...,АУ/( каждый из которых выбирается в зависимости от результата оценивания корреляционной функции входного воздействия £0 [пТ] блоками выборки данных и коммутации выхода. Все элементы схемы, расположенные в блоке, названном на рис. 1.10 "микроЭВМ", реализованы программными средствами.
Реализуемость перестройки структуры САУ, осуществляемой в масштабе реального времени на программном уровне, является следствием применения в ■автоматических системах высокопроизводительных микроЭВМ, на которые возлагаются функции статистического экспресс -анализа случайных процессов, их классификации, идентификации, распознавания образов и многие другие. Это, в конечном счете, улучшает показатели качества управления.
Опишите назначение отдельных элементов структурной схемы ЦАС.

Какие основные задачи решает ЦВМ в ЦАС.
Проведите анализ методов исследования ЦАС.
![]()
пульсных систем, и квантование по уровню (в АЦП и ЦАП), что делает их нелинейными. Существующие методы исследования нелинейных систем сравнительно мало пригодны для цифровых систем. Методы фазового пространства и фазовой плоскости могут
применяться для сравнительно простых систем, обычно, за малым исключением, не имеющих практического значения. Метод гармонической линеаризации [173] оказывается здесь сравнительно сложным вследствие необходимости учета влияния квантования по
времени. Осложнение также вызывает непрерывное смещение начальных точек отсчета на нелинейных статических характеристиках входных и выходных преобразователей, вызванное изменяющимися внешними воздействиями. Другие аналитические методы
исследования [217] также еще пока малоэффективны.Поэтому основным методом исследования цифровых систем управления является их моделирование на универсальных цифровых вычислительных машинах и на аналого-цифровых комплексах.
Однако такое моделирование не может проводиться без параллельного аналитического исследования, предназначенного для обоснования структуры проектируемой системы, определения основных ее параметров и качественных показателей и предварительного выбора всех элементов. При этом аналитические методы могут предполагать вынесение сложных расчетов на вычислительную технику с целью экономии времени и возможного просмотра большого количества вариантов.
Все это предъявляет к возможным аналитическим методам требования высокой эффективности и обозримости получаемых результатов. Наиболее пригодными здесь оказываются методы расчета, основанные на рассмотрении линеаризованных импульсных
систем с учетом влияния, оказываемого квантованием по уровню, в виде дополнительных шумов квантования или в виде дополнительных периодических режимов.__
В современной теории управления существует три группы методов исследования цифровых систем [1-11]:
1) методы, основанные на приближенном сведении цифровой системы к чисто непрерывной системе, при этом игнорируются все процессы, связанные с квантованием и наличием цифровых элементов;
2) методы, которые сводятся к исследованию дискретной модели цифровой системы, при этом рассматриваются только значения сигналов в моменты квантования и игнорируются все процессы между этими моментами;
3) точные методы исследования, при которых цифровая система рассматривается в непрерывном времени без каких-либо упрощений и аппроксимаций.
При использовании методов первой и второй групп гибридная непрерывнодискретная система фактически подменяется другой, более простой, что может привести к качественно неверным результатам. С другой стороны, точные методы проектирования, разработанные в [10,11], используют весьма сложный математический аппарат и поэтому пока не получили широкого распространения в инженерной практике. Их применение особенно важно в сложных случаях, например, при относительно больших интервалах квантования
В каких случаях ЦАС можно рассматривать как линейную систему.


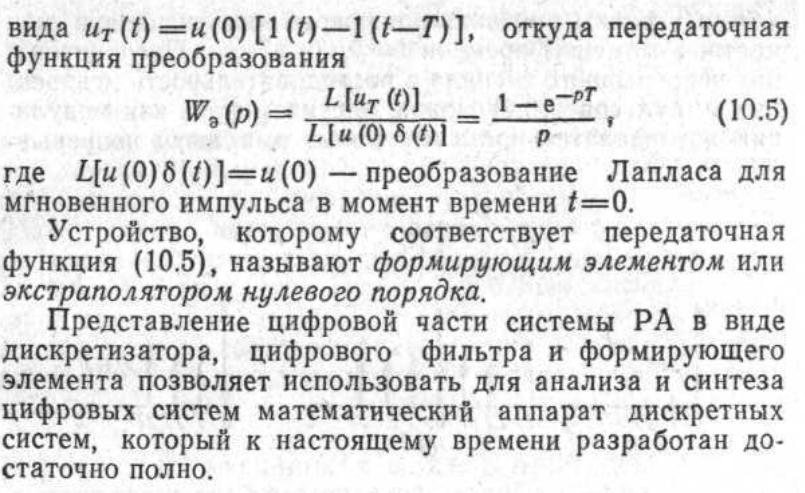
Назначение экстраполятора в ЦАС.
Основная задача экстраполятора в ЦАС – упрошение решения дифференциальных уравнений.

Что называется решетчатой функцией и смещенной решетчатой функцией.

Решетчатой функцией называют функцию времени f[nT], или в сокращенной записи f[n], значения которой определены в дискретные моменты времени t = nT, где n – целое число, а Т – период повторения. Операция замены непрерывной функции решетчатой, представленная на рис. 2.19, может быть выражена как
f[n] = f(t)|t=nT (2.23)
Рис. 2.19. Функции времени: а—непрерывная; б—дискретная; в — смещенная решетчатая
|
Непрерывная функция времени (рис. 2.19, а) служит для образования дискретной (решетчатой) (рис. 2.19, б). Изображенные на рис. 2.19, б ординаты исходной функции времени представляют собой дискреты, определенные для моментов времени t=nT. Дискреты могут определяться также и для смещенных моментов времени t = nT + T = (n + ε)T. Смещение T = const может быть положительной или отрицательной величиной при выполнении условия |T| < T, или | ε | = |T/T| < 1. Образование смещенной решетчатой функции f[n, ε] из непрерывной функции f(t) для случая T>0 показано на рис. 2.19,в. |

Решетчатая функция не обязательно должна формироваться из некоторой исходной непрерывной функции. Любая числовая последовательность некоторой величины, определенной в дискретные равноотстоящие моменты времени, может трактоваться как решетчатая функция.
Обратная задача — формирование непрерывной функции из решетчатой — не может быть решена однозначно, так как функции, заданной в дискретные моменты времени, может соответствовать бесконечное множество непрерывных функций. Непрерывные функции, совпадающие с заданными дискретами, называются огибающими решетчатой функции.
Что называется разностью решетчатой функции и разностным уравнением ( сравните с непрерывными системами).

Назначение Z – преобразования и его основные свойства:
( линейности, свертка, формула обращения, теорема смещения,
изображение разностей, сумм).






Передаточные функции импульсного фильтра.


Передаточные функции непрерывной части ЦАС.



Передаточные функции ЦВМ.

Передаточные функции ЦАС.

Частотные характеристики ЦАС.



Способы построения переходных процессов в ЦАС.



Устойчивость ЦАС.


Статистические характеристики случайных процессов в ЦАС.



Случайные типовые процессы в ЦАС.



Расчет ошибок в ЦАС.


Какие основные требования предъявляются к САУ при их синтезе.



Какие вспомогательные требования предъявляются к САУ при их синтезе.

Каким показателем можно задать запас устойчивости в замкнутой САУ.
![]()

В каких случаях цифровая система может рассматриваться как непрерывная.
Излагаемая ниже методика динамического синтеза рассматривается, в основном, применительно к одномерным системам управления и базируется на частотных представлениях и методах. Все основные положения методики расчета изучаются вначале применительно к непрерывным системам, а затем эти положения распространяются на дискретные системы. Это вносит единообразие в синтез непрерывных и дискретных систем, что позволяет рассматривать их с одинаковых позиций. Такой подход полезен тем, что в случаях, когда период дискретности относительно мал и его выбор определяется факторами, не связанными
с динамическим синтезом, цифровая система может рассматриваться как непрерывная. Условия этого были отмечены в § 4.4. В иных случаях в процессе синтеза необходимо определить требуемое значение периода дискретности, что заставляет вести расчет системы как дискретной. Сохранение единой методики расчета позволяет в каждом конкретном случае более точно определить допустимость рассмотрения
системы как непрерывной или необходимость учета влияния квантования по времени. Методика динамического синтеза иллюстрируется построением логарифмических частотных характеристик, что,
вообще говоря, не является обязательным и служит лишь для наглядности изложения. Все расчетные соотношения могут использоваться и без построения частотных характеристик.
Какими минимальными сведениями о входных сигналах можно ограничиться при синтезе САУ.

Как обеспечивается заданная точность при синтезе САУ.






Как обеспечивается заданный запас устойчивости при синтезе САУ.


Что представляет собой динамический критерий точности.


Порядок построения желаемой ЛАЧХ при синтезе САР с астатизмом второго порядка.




Порядок построения желаемой ЛАЧХ при синтезе САР с астатизмом первого порядка.



Порядок построения желаемой ЛАЧХ при синтезе статической САР.


Дополнительно (ХЗ, надо или нет)