Каковы преимущества устройств цифровой обработки сигналов перед аналоговыми устройствами.

Очевидно, что основные характерные черты цифровых систем управления связаны с наличием компьютера (цифрового устройства) в составе системы. Главные преимущества цифровой управляющей техники сводятся к следующему:
• используется стандартная аппаратура;
• нет дрейфа параметров, характерного для аналоговых элементов;
• повышается надежность и отказоустойчивость;
• существует возможность реализации сложных законов управления, в том числе логических и адаптивных;
• гибкость, простота перестройки алгоритма управления.
Как обычно, за достоинства приходится расплачиваться. В результате квантования по времени компьютер получает только значения входных сигналов в моменты квантования, игнорируя все остальные. Кроме того, АЦП и ЦАП имеют ограниченное число разрядов, поэтому при измерении входного сигнала и выдаче сигнала управления происходит округление значения к ближайшему, которое сможет обработать АЦП (или ЦАП). Это явление называют квантованием по уровню.
Таким образом, квантование в цифровых системах приводит к специфическим эффектам, которые можно считать их недостатками:
• между моментами квантования система фактически не управляется, это может привести к потере устойчивости;
• при квантовании по времени теряется информация о значениях измеряемых сигналов между моментами квантования;
• квантование по уровню приводит к потере точности, что может вызвать дополнительную ошибку в установившемся режиме и автоколебания.
Опишите два направления создания сау с микроЭвм.
Первое из них связано с использованием центральных управляющих микроЭВМ. Подобные системы могут применяться для управления сложными объектами (самолетами, ракетами, прокатными станами, доменными печами и т.п.) или группами объектов при комплексной автоматизации в различных отраслях промышленности и сельского хозяйства (металлургической, химической, нефтеперерабатывающей, в тепличном овощеводстве, животноводстве и т д.).
Общая структурная схема автоматической системы с микроЭВМ для этого случая показана на рис. 1.1 [23, 175). Система содержит ряд входных В\П,. ВхП:, . . . , ВхПЛ и выходных ВыхН,. Вы.\11;,..., ВыхП* преобразователей, обменивающихся сигналами управления с микроЭВМ в процессе преобразования данных по шине управления. Сигналы с выходных преобразователей поступают на исполнительные устройства, воздействующие на объект (или объекты) управления.
Такая система может быть связанной многомерной, если осуществляется управление • сложным, многомерным объектом, и несвязанной многомерной, если осуществляется управление группой несвязанных одномерных объектов. В последнем случае САУ с микроЭВМ распадается на совокупность одномерных, систем; ее виртуальная (кажущаяся) структура представляется в виде совокупности одноконтурных систем автоматического управления (рис. 1.2), каждая из которых имеет свою программу управления ПУ,,ПУ2,...,ПУЛ.
При управлении сложным объектом или группой объектов процессор обслуживает по очереди отдельные каналы управления.

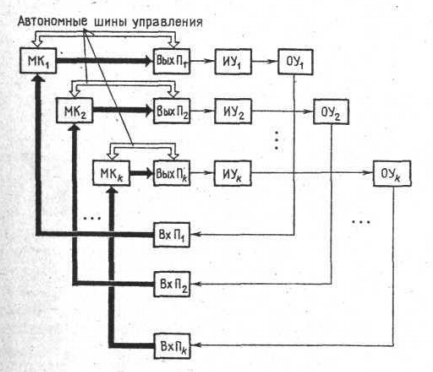
Второе направление, по которому развиваются в настоящее время САУ с микроЭВМ, - это использование в каждом контуре управления автономной микроЭВМ, называемой часто микроконтроллером [158, 231, 232]. Структурная схема САУ с автономными микроЭВМ МКі , МК2,..., МКк показана на рис. 1.3. Микроконтроллеры представляют собой упрощенные варианты микроЭВМ, размещаемых в непосредственной близости от управляемого объекта. В микроконтроллерных системах центральная ЭВМ либо отсутствует совсем, либо вводится для передачи ей функций диспетчера или супервизора.