

Многоканатные подъёмные машины
Более современны многоканатные подъёмные машины с ведущими шкивами трения, у которых подъёмный сосуд подвешен на нескольких канатах – от двух до восьми. Применение нескольких канатов позволяет использовать канаты меньших диаметров, что обусловливает меньшие габариты и массы подъёмной машины. В настоящее время изготовляют машины серии ЦШ
ЦШ2,1х4 ЦШ4х4
ЦШ5х4 ЦШ5х8
ЦШ – цилиндрический шкив. Устанавливаются на копре. Орган навивки представляет собой много желобчатый шкив.
Достоинства
Возможность подъёма грузов с большой глубины.
Высокая степень безопасности.
Меньшая масса и размеры.
Недостатки
Возможно проскальзывание каната.
Сложное подвесное устройство.
Более сложная эксплуатация.
Литература:
1. Р.Н. Хаджиков “Горная механика”, Москва, ”Недра”, 1982г. (стр. 92-112) рис. 52-54.
2. ДНАОП 10.0-1.01-05 “Правила безопасности в угольных шахтах”, Киев, “Основа”, 2005 г.
Лекция №29
Тема: «Размещение подъёмных установок относительно ствола шахты»
Барабанные подъёмные машины и одноканатные машины со шкивом трения располагаются в здании на уровне земли, а многоканатные со шкивом трения – в машинном зале на копре.
При одноканатных установках копровые шкивы в зависимости от размещения подъёмных сосудов в стволе, места расположения машинного здания и типа подъёмной машины могут быть установлены на копре в одной вертикальной плоскости или на одной геометрической оси. Первое расположение шкивов целесообразно при установках с одноканатным шкивом трения и при одном барабане, вторая – при двух барабанах.
Минимальное расстояние между осью отвеса каната и осью барабана должно быть не менее
в≥ 0,6Нк + 3,5 + Dб,
так как в противном случае нельзя будет разместить укосины копра.
Высота копра Нк для подъёмов с неопрокидными клетями
Нк = hэ + hc + hп + 0,75Rш+hш
Для скипового подъёма
Hk = Hн.б + hc + hр + hп + 0,75Rш + hш,
где hэ – высота эстакады; hc – высота сосуда с прицепным устройством; hп – высота переподъёма (устанавливается нормами ПБ); hш – расстояние по вертикали между осями копровых шкивов в случае их расположения в одной вертикальной плоскости; Нн.б – высота наземного бункера; hp – высота превышения над бункером.

Отрезок каната от точки схода его со шкива до соприкосновения с барабаном называется струной. Её длина определяется:
Lc
где
С![]() 1
м – превышение оси подъёмной машины
над отметкой устья ствола.
1
м – превышение оси подъёмной машины
над отметкой устья ствола.
Во избежание больших провесов и колебаний максимальная длина стрелы Lc без поддерживающих роликов не должна превышать 65 м.
Угол наклона струны к горизонту определяется:
tg
=
 .
.
Конструкция рамы подъёмных машин допускает минимальный угол наклона струны к горизонту 30о, иначе нижний канат может задевать за раму. Чрезмерное увеличение угла повышает давление на основание копра и укосину и затрудняет устройство фундаментов укосины копра, которые могут вклиняться в фундамент машины. Поэтому рекомендуется 30о < < 45о.
Отклонение канатов от вертикальной плоскости направляющего шкива – девиация. Согласно ПБ, углы девиации не должны превышать 1о30' для цилиндрических барабанов и 2о со стороны малого цилиндра для бицилиндроконических.
В случае превышения углов девиации, установленных нормами, следует увеличить длину струны каната Lc за счёт отнесения машины от ствола или за счёт увеличения высоты копра. Иногда целесообразно уменьшить ширину барабана за счёт увеличения его диаметра.
Литература:
1. Р.Н. Хаджиков “Горная механика”, Москва, ”Недра”, 1982г. (стр. 113-115, 119-122),
рис. 68, 69 и 74-76.
2. В.М. Попов Водоотливные установки. Москва, Недра, 1990.
3. ДНАОП 10.0-1.01-05 “Правила безопасности в угольных шахтах”, Киев, “Основа”, 2005 г.
Лекция №30
Тема: «Основы кинематики и динамики подъёмных установок»
Основные исходные данные для расчёта кинематики подъёма.
Исходными данными при проектировании подъёмной установки являются: годовая добыча Аг и глубина шахты Hш.
Часовая производительность подъёмной установки:
Аг
=
![]() ,
,
где Кр – коэффициент резерва производительности и неравномерности работы подъёмной установки; Кр = 1,5;
n – число рабочих дней в году, равное 300;
tсут – число часов работы подъёма в сутки (подъём расчитывается на трёхсменную работу, n = 18 ч).
Часовая производительность подъёмной установки может быть обеспечена большим диапазоном вместимостей подъёмных сосудов. Наиболее выгодная должна соответствовать минимальным годовым расходам по капитальным и эксплуатационным затратам для заданных условий.
Наибольшее распространение получила формула проф. Г. М. Еланчика по определению оптимальной грузоподъёмности скипов для угольных шахт.
mоп
= Аг![]() ,
кг;
,
кг;
где tп – продолжительность паузы, зависящая от времени загрузки и разгрузки сосудов, с.
Число подъёмов в час (число циклов) будет равно:
nч
=
![]() .
.
Время, затрачиваемое на один цикл подъёма и продолжительность движения сосудов:
Тц
=
![]() ,
с. Т = Тц
– tп,
с.
,
с. Т = Тц
– tп,
с.
Средняя скорость движения подъёмных сосудов:
Vср
=
![]() ,
м/с.
,
м/с.
Ориентировочная максимальная скорость:
Vmax ор = Vср, м/с;
где - множитель скорости; ориентировочно принимается 1,15 1,20 для клетевых подъёмов и 1,20 1,25 для скиповых подъёмов.
Определим максимальную фактическую скорость Vmax. фак.. Для этого определим необходимую частоту вращения барабана:
nб
=![]() ,
мин-1.
,
мин-1.
Частота вращения двигателя определится:
nдв = nб ∙ U, мин-1;
где U – передаточное число редуктора определяется по паспорту принятой подъёмной машины. Затем подбирают наиболее близкую (большую) к стандартной частоту вращения двигателя и определяют фактическую скорость движения сосудов Vmax. фак.:
Vmax.
фак. =![]() ,
м/с.
,
м/с.
где nc – синхронная скорость вращения выбранного двигателя, мин-1;
S – скольжение двигателя;
U – передаточное число редуктора.
Необходимо чтобы Vmax. фак. ≤ Vmax..
При подъёме-спуске людей по вертикальным выработкам максимальная скорость движения клетей по ПБ не должна превышать 12 м/с, при транспортировании грузов – определяется проектом.
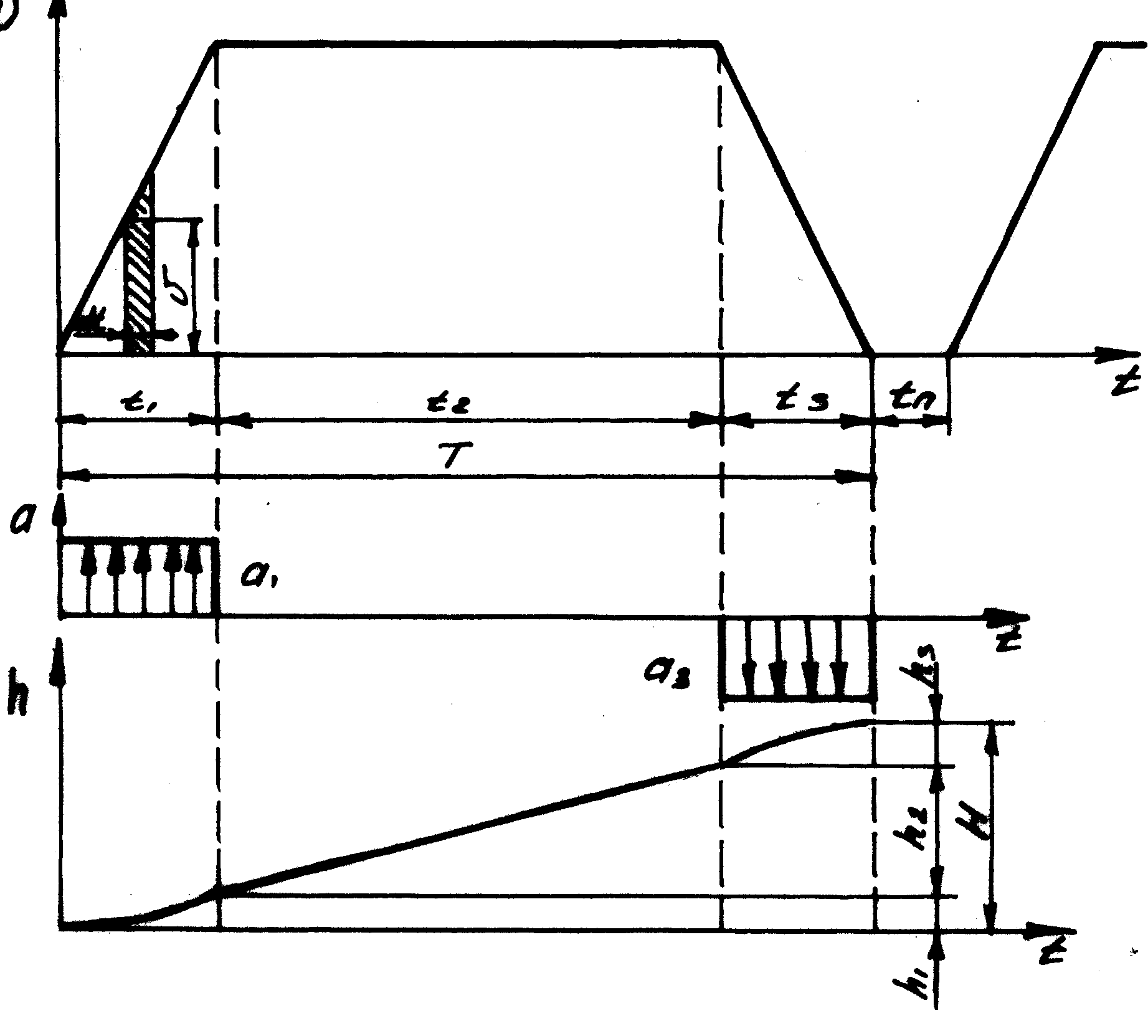
Диаграммы скорости
Трёхпериодная – для подъёма с не опрокидными клетями.
Пятипериодная – для подъёма с разгрузкой через дно.
Семипериодная – для подъёма с опрокидыванием сосудов.
Расчёт трёхпериодной диаграммы скорости
Исходные данные
Высота подъёма – Н, м.
Расчётная продолжительность движения – Тр, с.
Ускорение – а1, м/с2.
Замедление – а3, м/с2.
Определяемые величины
Максимальная скорость - Vmах, м/с.
Время ускоренного движения скипа и путь, пройденный за этот период:
![]()
![]()
где V0 – скорость движения скипа в разгрузочных кривых, м/с.
Время замедленного движения и путь, пройденный за этот период:
![]()
![]()
Путь, пройденный за время равномерного хода и продолжительность этого периода:
![]()
h2
t2 = ———, с.
Vm.ф
Общая продолжительность движения
Тр = t1 + t2 + t3, с.
Для расчёта диаграммы вычертим её общий вид
Основное уравнение динамики подъёма и диаграммы усилий.
В теории подъёмных установок рассматривают два вида движения: установившееся и неустановившееся. Установившееся движение это движение сосудов с постоянной скоростью или с постоянным ускорением и замедлением, когда отсутствуют их колебания.
Неустановившееся движение сопровождается собственными колебаниями системы, возникающими от внезапного приложения или снятия нагрузки, от скачкообразного изменения момента, передаваемого двигателем, и других причин.
Основное уравнение. Вращающийся момент Мвр, создаваемый подъёмным двигателем в установившемся режиме относительно оси вращения органов навивки каната, затрачивается на преодоление статического Мст и динамического Мдин моментов подъёмной системы относительно той же оси:
Мвр = Мст + Мдин.
Для подъёмной установки с органом навивки постоянного радиуса R
FR = FстR + FдинR или F = Fст + Fдин.
Статическое усилие подъёмной системы Fст представляет собой разность статических натяжений каната поднимающейся Fпод и опускающейся Fоп ветвей каната
Fст = Fпод – Fоп, Н.
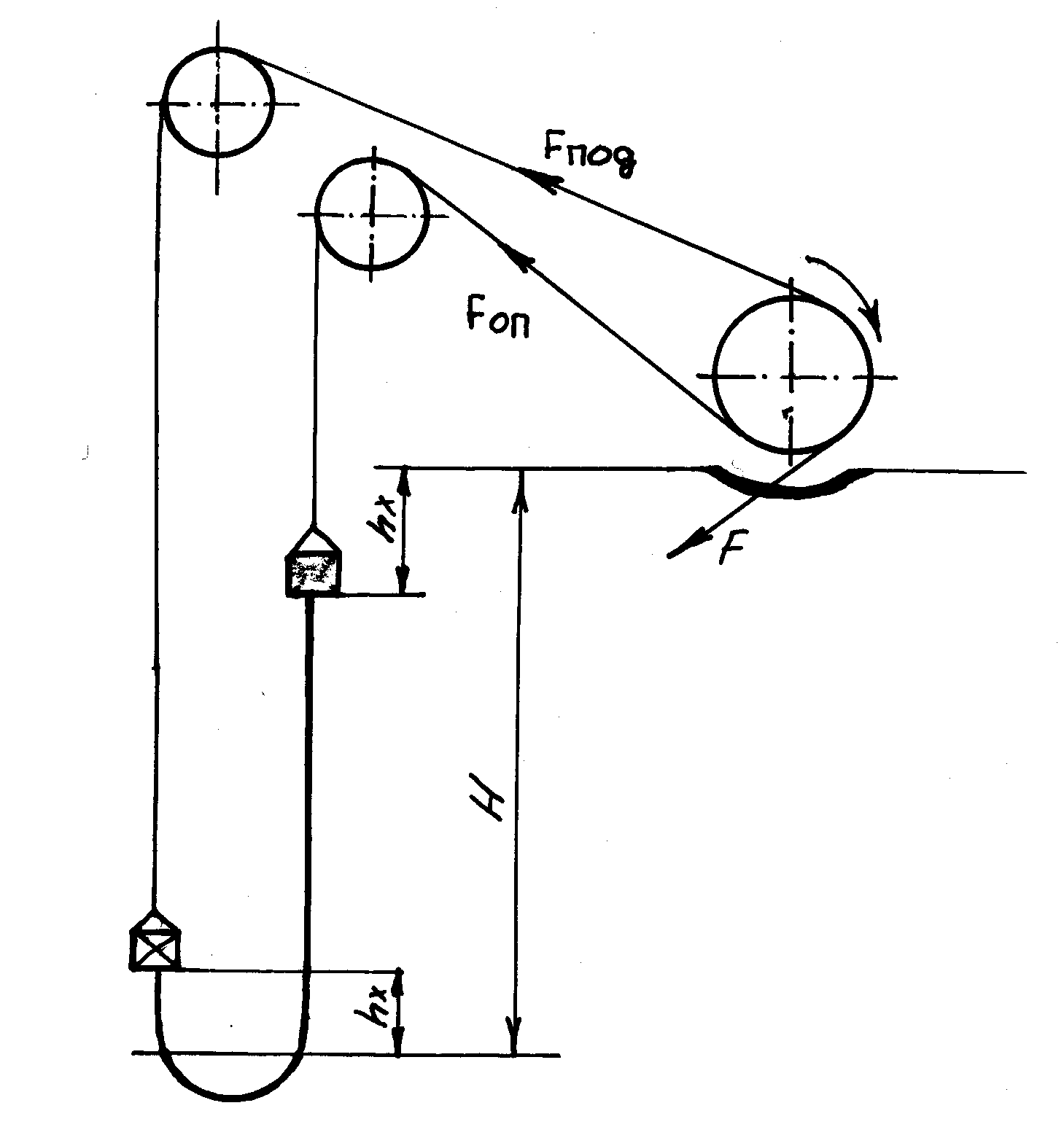
Рассмотрим схему подъёмной установки в такой момент времени, когда сосуды прошли путь hх с начала движения их от приёмных площадок.
Натяжение ветвей каната от статических нагрузок, в которые также включены и силы сопротивления движению, будут равны:
поднимающейся ветви каната
Fпод = [mг + mс + p(H– hх) + qhх]g+ wпод, Н;
опускающейся ветви
Fоп = [mс + phх + q(H-hх)]g – wоп, Н;
где wпод и wоп – сопротивления движению поднимающегося и опускающегося сосудов, направленные против направления движения сосудов.
Fcт = [kmг + (p-g)(H – 2hx)]g, Н.
Динамическую составляющую движущего усилия Fдин определяют как произведение приведённой массы движущихся частей подъёмной системы на линейное ускорение:
Fдин = mпа, Н.
Под приведенной массой mп понимается расчётная, приведённая к окружности навивки каната, где имеет место линейное ускорение подъёма, оказывающая такое же инерционное воздействие, как фактически существующие, движущиеся со своим ускорением массы подъёмной системы.
Приведённая масса подъёмной системы:
mп = mг + 2mc + 2Lг. к.р + Lу. к.q + 2m'н. ш. + m'б + m'з.п. + m'p, кг;
где Lг.к. – длина головного (подъёмного) каната, м;
Lу.к. – длина уравновешивающего каната, м;
m'н.ш., m'б, m'з.п., m'p – приведённые массы направляющего шкива, органов навивки, зубчатой передачи, ротора, кг.
Подставляя в формулу Fст и Fдин получим:
F = [kmг + (p - q)(H – 2hx)]g + mпа, Н.
Это уравнение, выведенное впервые акад. М. М. Фёдоровым, называется основным динамическим уравнением подъёмной установки. Оно пригодно для подъёмов с неопрокидными подъёмными сосудами при постоянном радиусе навивки.
Причём при построении диаграммы усилий для трёхпериодной диаграммы скорости будут рассмотрены три случая: системы без уравновешивающего каната (q = 0), система с равновесным уравновешивающим канатом (q = p) и система с тяжёлым уравновешивающим канатом [(q-p)>0].
Необходимость в уравновешивании подъёмной системы устанавливается по значению степени статической неуравновешенности
р∙Н
δ = ———,
k∙Qп
где k – коэффициент вредных сопротивлений в стволе и установке.
Уравновешивание необходимо применять, если δ ≥ 0,5.