

Расчёт клиновых механизмов.
К линовые
механизмы используют в качестве
промежуточного звена в сложных
зажимных системах. Рассмотрим вначале
идеальный односкосый клин (рис. 5.4).
В идеальном механизме трение отсутствует.
линовые
механизмы используют в качестве
промежуточного звена в сложных
зажимных системах. Рассмотрим вначале
идеальный односкосый клин (рис. 5.4).
В идеальном механизме трение отсутствует.
находим силу Q привода
Q = Wtga, (5.10)
где а — угол скоса клина.
Если клиновой механизм не идеальный, то на рабочих поверхностях клина имеют место силы трения
величину силы Q можно представить суммой
Q = Q1+F2, (5.11)
где F2 — сила трения на горизонтальной плоскости клина. Из схемы сил имеем:
Q1=Wtg(a + 1)
F2=Wtg 2
где
![]() 1
и
2
— углы трения на скосе и основании
клина.
1
и
2
— углы трения на скосе и основании
клина.
Q=W(tg(a + 1)+tg 2)
Из полученной зависимости следует, что при одном и том же значении W величина Q тем меньше, чем меньше угол скоса клина и углы трения на его рабочих поверхностях. Клиновой механизм является самотормозящим, если а<ф1 + ф2.
Е сли
клиновой механизм используется в роли
механизма-усилителя, то в нем обычно
принимают а > 10° (несамо-тормозящий
клиновой механизм)
сли
клиновой механизм используется в роли
механизма-усилителя, то в нем обычно
принимают а > 10° (несамо-тормозящий
клиновой механизм)
Для повышения эффективности клинового механизма стремятся снизить углы трения ф1 и ф2. Достигается это заменой трения скольжения трением качения за счет применения вращающихся роликов.
Числовые значения i для этого случая в зависимости от угла скоса клина а, принимаемого в градусах, можно выбрать из соотношения
i = 4,599 - 0,2454а + 0,005а2.
Для клинового механизма с роликом на наклонной поверхности и трением скольжения на опорной
i = 5,943 -0,3538а + 0,007а2,
а для клинового механизма с роликами на наклонной и опорной поверхностях I = 8,185 -0,8775а + 0,013а2.
Расчёт клиноплунжерных механизмов.
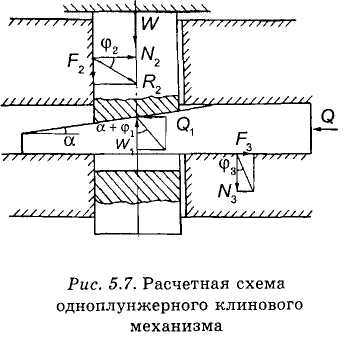
Клиноплунжерные механизмы используются в качестве усилителей приводов зажимных механизмов или в качестве центрирующих механизмов патронов и оправок
Из условия силового равновесия следуют такие исходные соотношения:

Из этих соотношений легко получаем зависимости:
Q = W1(tg(a + l)+ tg 3);
W=W1(1-tg(a + 1)tg 2),
откуда окончательно находим
![]()
Передаточное отношение сил для рассмотренного клино-плунжерного механизма будет
![]()
Численные значения i для данного случая в зависимости от угла скоса клина можно выбирать из Соотношения
i = 4,535 - 0,2438а + 0, 0048а2
Расчёт эксцентриковых механизмов.
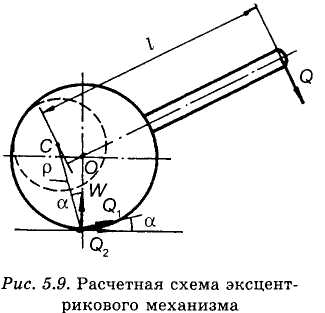
Эксцентриковые механизмы по сравнению с резьбовыми являются быстродействующими, однако по силе зажима значительно уступают им.
Рассмотрим силовую схему эксцентрикового механизма,
Условие силового равновесия эксцентрика можно записать в виде
mc=Ql-
Q1![]() = 0.
= 0.
Рассматривая эксцентрик как круг, на который навернут клин, можно установить связь между силой закрепления W заготовки и силой воздействия эксцентрика Qx,
![]()
где ф1 иф2 — углы трения на поверхности воздействия эксцентрика на заготовку и на оси
его вращения соответственно. Подставив значение Q1, получим
![]()
откуда окончательно найдем
![]()
где р — расстояние от оси вращения эксцентрика до точки его соприкосновения с поверхностью.
Передаточное отношение сил для эксцентрикового механизма определяется соотношением
![]()
Если необходимо определить момент на эксцентрике для обеспечения требуемого усилия W, то в этом случае следует пользоваться зависимостью
![]()