

17. Windows nt в роли осрв. Суть проблемы. Архитектура nt. Варианты использования для разработки срв.
Суть проблемы.
Довольно популярна благодаря, хотя и ни в 6ке лидеров.
Достоинства:
привлекательно использовать одну и ту же ОС на всех уровнях иерархии;
Win32 API считается стандартом, на его базе разработано множество приложений;
у Windows NT неплохие сетевые возможности;
графический интерфейс Windows NT стал популярным;
в среду NT включены многие виды средств разработки.
Недостатки:
Плохо прогнозируема (предсказуемой);
Неподходящая для ОС РВ система обработки прерываний;
NT – не лучшая платформа для обработки в РВ. В исходном виде, на ее базе можно построить лишь простую, мягкую СРВ. Для жесткой СРВ использование NT невозможно - СРВ никогда не будет предсказуемой.
Архитектура NT
У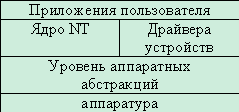 ровень
аппаратных абстракций – нижний
уровень, программный
слой, через который драйверы взаимодействуют
с аппаратурой. Именно на нем начинается
обработка прерываний.
ровень
аппаратных абстракций – нижний
уровень, программный
слой, через который драйверы взаимодействуют
с аппаратурой. Именно на нем начинается
обработка прерываний.
Драйвера являются модифицируемой частью ядра.
Варианты использования для разработки СРВ.
Использование NT в исходном виде – только как мягкую СРВ.
Использование NT на "верхнем" уровне систем - суть метода состоит в том, чтобы разнести функции управления в реальном времени и SCADA-систем по разным уровням иерархии. Контроллеры нижнего уровня, работающие с вводом/выводом и оснащенные ОС РВ, передают данные для отображения и т.д. на компьютеры с NT, расположенные на более высоком уровне и обслуживающие SCADA. В этом случае непосредственно к NT требования РВ не предъявляются, поскольку это прерогатива нижнего уровня.
Использование многопроцессорной архитектуры - в ряде систем NT выполняется на одном процессоре (группе процессоров), а часть РВ - на другом. Достоинства: не требуется модификаций каждой ОС, для каждой подсистемы можно выбрать наиболее подходящую ОСРВ. Недостатки: высокая стоимость, поведение в РВ зависит от поведения качества канала межпроцессорной связи.
Совместная работа на одном процессоре NT и ОС РВ - Мощность современных процессоров достаточна для одновременного функционирования NT и программ РВ. Наиболее распространены два подхода: первый - модификация HAL с перехватом прерываний и включением небольшого диспетчера или ОС РВ. второй - выполнение NT, как одной из задач над (супервизором) ОС РВ. При этом ядро РВ размещается вне адресного пространства NT.
Модификации ядра. Только этот подход способен превратить NT в настоящую ОС РВ. Однако исходные тексты ядра NT недоступны для третьих фирм - это политика Microsoft, поэтому модификации могут исходить только от самой компании, что маловероятно, учитывая ее ориентацию на рынок ПО общего назначения.
18. Linux в СРВ. Состояние проблемы. Архитектура Linux реального времени. Перехват прерываний и эмуляция. Установки RT-Linux.
Состояние проблемы.
В режиме мягкого РВ уже давно используется. С 1998 уже используется и в жестких. Время отклика до 10 мкс. Сегодня, благодаря ядрам 2.0 и 2.2 с расширениями РВ, у разработчиков есть проверенная, легко устанавливаемая Linux PB. Однако специалисты, работающие с приложениями РВ, консервативны и Linux PB доверять не спешат, пока не увидят убедительного числа успешно реализованных индустриальных Linux-проектов.
Архитектура Linux реального времени.
L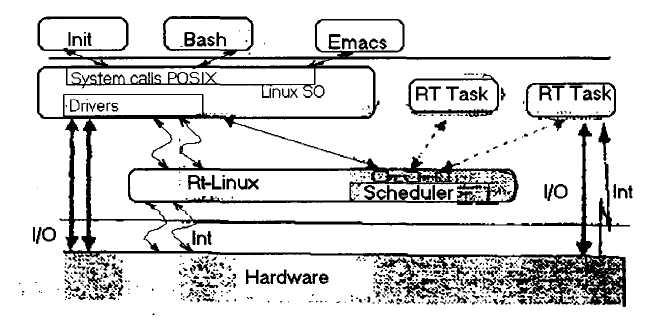 inux
PB
обеспечивает возможность исполнения
задач РВ и обработчиков прерываний в
той же самой машине,
где используется и стандартная Linux.
Эти задачи и прерывания должны
исполняться в любое время, независимо
от того, чем в этот момент занята Linux.
Вместо изменения ядра было написано
новое.
inux
PB
обеспечивает возможность исполнения
задач РВ и обработчиков прерываний в
той же самой машине,
где используется и стандартная Linux.
Эти задачи и прерывания должны
исполняться в любое время, независимо
от того, чем в этот момент занята Linux.
Вместо изменения ядра было написано
новое.
Основное ядро Linux запускается как одна из задач ядра РВ. разделяя процессор с другими задачами РВ. При этом Linux является фоновой задачей с самым низким приоритетом и исполняется только тогда, когда не исполняется ни одна из задач реального времени.
Один из основополагающих принципов Linux PB - это возложить на ОС все, что только можно.
Реализовано два механизма обмена информацией между задачами РВ и Linux: разделяемая память и FIFO-буферы РВ.
Перехват прерываний и эмуляция.
Задача Linux не может заблокировать никаких прерываний и не может защититься от вытеснения. Подобная возможность реализована благодаря программной эмуляции аппаратного управления прерываниями. При возникновении прерывания ядро РВ перехватывает его и принимает решение по его дальнейшей передаче. Если обработчик прерывания РВ существует, то он запускается на исполнение. Если такого обработчика нет, либо этот обработчик информирует о разделении этого прерывания с Linux, то оно помечается как ждущее (pending).
Установка RT- Linux
Скачай и ставь дистриб, пропиши руты и scr’ы и ебашь в кашу… не нравится пиши под Дос дрова.