

4) Компоновка станков с чпу
С танком-автоматом называется самоуправляющаяся рабочая машина, которая при осуществлении заданного технологического процесса самостоятельно выполняет все рабочие и холостые движения цикла обработки и нуждается лишь в контроле за ее работой и наладке. Степень автоматизации станка можно повысить путем введения автоматических в нецикловых механизмов и устройств, не связанных непосредственно с рабочим циклом автомата (замена и регулировка инструмента, уборка отходов и т. д.).
Станком -пол у автоматом называется рабочая машина, работающая в автоматическом цикле, для повторения которого требуется вмешательство рабочего (загрузка заготовок и разгрузка деталей, пуск станка, реже ориентация изделий).
5) Модульное построение станков с чпу
Для станков с ЧПУ применяется система обозначения осей координат ИСО. Особенность ее в том, что ось координат 2. принимают всегда параллельной оси главного шпинделя станка, независимо от того, как он расположен — вертикально или горизонтально. Эта особенность позволяет при ЧПУ для наиболее распространенной плоской обработки использовать в программах обозначения координат через X и У независимо от расположения оси шпинделя. В качестве положительного на- правления оси 2 принимают направление от заготовки к инструменту. Ось X — всегда горизонтальна. Дополнительные движения, параллельные осям X, У, 2, обозначают соответственно 1}9 V, (вторичные) и р> г (третьей очереди). Вращательные движения вокруг осей Ху У, 2 обозначают соответственно буквами а% Ь9 с9 а дополнительные — й и е. Положительные направления вращательных движений инструмента +а9 +с соответствуют направлению вращения правого винта при его продвижении соответственно вдоль осей +Х9 +У, +2.
6) Привод главного движения
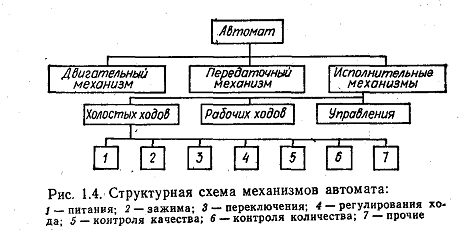
Приводы станков предназначены для осуществления движений: главного, подач и вспомогательных. Эти движения могут быть независимые и строго согласованные, определяющие простую или сложную разветвляющиеся структуры. Обобщенная структура привода металлорежущего станка включает двигатель (Дв) вращательного или поступательного действия; 2) звенья, устройства и механизмы передачи движения — передаточные механизмы (ПдМ); .3) звенья, устройства и механизмы преобразования движения — преобразовательные механизмы (ПрМ); 4) исполнительный рабочий орган (РО); 5) устройства управления (УУ), обеспечивающие включение. выключение, реверсирование, измерение и регулирование движения.
7) Привод подач
В станках с ЧПУ последним звеном кинематической цепи привода подачи являются тяговые устройства, которые должны удовлетворять следующим требованиям: обеспечивать заданный закон перемещения и скорости; иметь высокий КПД; обладать высокой жесткостью, которая является одной из главных характеристик и влияет на статические и динамические погрешности исполнительного узла; иметь малый момент инерции, что определяет быстродействие привода и точность обработки; обладать высокой чувствительностью к малым перемещениям; не образовывать зазоры, когда под действием внешней нагрузки имеет место раскрытие стыков; иметь минимальный износ в процессе эксплуатации.
Первоначальным этапом расчета привода является выбор двигателя.
Исходными данными для выбора двигателя привода подачи служат; силы трения в опорах, направляющих и в передаче; передаточные отношения механических звеньев привода (коробки подач, винтовой пары, передачи рейка-шестерня и т. д.); масса перемещаемого органа вместе с деталью или другим органом; моменты инерции механических звеньев; КПД механических передач; скорости быстрого хода и установочных перемещений, а также диапазон рабочих подач; нагрузки и т. д.
Последовательность выбора включает
1.Определение скоростей двигателя
2.Определение моментов инерции, приведенных к валу двигателя,
3.Определение моментов двигателя