

1. Предположим, что помеха и смесь сигнала и помехи распределены по нормальному закону:
![]() )=
)=![]() (8.12)
(8.12)
![]() -
-![]() exp[-
exp[-![]() ],
],
где
![]() =
=![]() - дисперсия эффекта, соответствующего
наличию помехи с дисперсией
- дисперсия эффекта, соответствующего
наличию помехи с дисперсией ![]() и сигнала с дисперсией
и сигнала с дисперсией ![]() , mu
- математическое ожидание выходного
эффекта при наличии полезного сигнала.
, mu
- математическое ожидание выходного
эффекта при наличии полезного сигнала.
Такие распределения вероятностей являются типичными в системах обработки информации с интегрированием на их выходе за время, значительно превышающее интервал корреляции помех. Тогда в соответствии с (8.8) для вероятности ложных тревог будем иметь выражение:
![]() ,
(8.13)
,
(8.13)
Решение которого дает
Рл.т
=1-F(![]() ) (8.14)
) (8.14)
где F(∙) - известная функция Лапласа,
![]() (8.15)
(8.15)
Из
выражения (8.14) определяют пороговое
значение сигнала: ![]() (8.16)
(8.16)
где функция F-1(x) является обратной F(x), т.е. такой что если x1=F(x), то x=F-1(x’). Вероятность правильного обнаружения определяется на основании (8.8) и (8.12):
![]() (8.17)
(8.17)
На
основании (8.16) и (8.17) аналитическое
выражение ВХО имеет вид:
![]() =F[
=F[![]() (8.18)
(8.18)
При пользовании таблицами и анализе аналитических выражений ВX0 следует учитывать, что наряду с функцией Лапласа, определяемой выражением (8.15), в литературе используют также и другие функции:
- интеграл вероятности
(8.19)![]()
который также иногда называют функцией Лапласа;
-функцию вида
![]() Ф(
Ф(![]() (8.20)
(8.20)
которую иногда называют нормированной функцией Лапласа;
- функцию вида
![]()
![]() )=2F(x
)=2F(x![]() (8.21)
(8.21)
которую называют интегралом вероятности, функцией ошибок, функцией Крампа, т.е. erfx=Ф*(x)
Если, например, при выводе выражения для ВХО воспользоваться функцией, определяемой (8.10), то аналогично (8.18) будем иметь:
=![]() F[
F[![]() (8.22)
(8.22)
При использовании функции (8.20) получим выражение:
=0,5+F[![]() (8.23)
(8.23)
2. Предположим, что помеха и смесь сигнала и помехи распределены по релеевскому закону:
![]() (8.24)
(8.24)
![]()
Этот закон справедлив для структуры тракта обработки, включающего высокочастотный фильтр - линейный детектор интегратор, когда огибающая сигнала флюктуирует по релеевскому закону. Согласно (8.8) и (8.15) имеем:
 (8.25)
(8.25)
Отсюда аналитическое выражение ВХО имеет вид:
 (8.26)
(8.26)
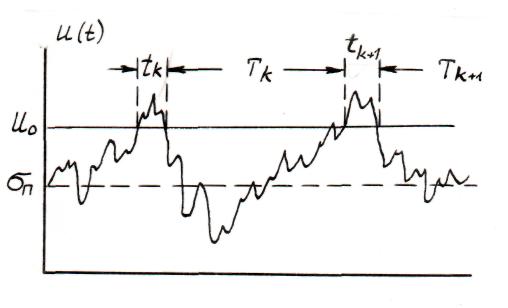
Физическая сущность вероятности ложной тревоги состоит в том, что она определяет превышение напряжением помехи порогового уровня в течение определенного времени (времени реализации критерия обнаружения). В тракте обработки гидроакустических сигналов это время обратно пропорционально величине полосы пропускания. Если выбросы помехи пересекают пороговый уровень в течение времени tk с интервалом Tk, как показано на Рис. 8.3, то для вероятности ложной тревоги справедливо выражение
![]() (8.27)
(8.27)
Допустимый интервал между ложными тревогами - время Тл.т определяется требованиями потребителя и зависит от назначения ГАС, способа их использования
Так, например, среднее за единицу времени число выбросов огибающей нормального шума, превосходящих уровень u0, определяется выражением
 (8.28)
(8.28)
где
коэффициент a
зависит от структуры тракта обработки
и для идеального полосового фильтра
равен
![]() .
.
С учетом (8.25), (8.26) выражение (4.28) используют также в виде:
![]() (8.29)
(8.29)
При
величине
![]() >2-3 выбросы огибающей становятся
независимыми, и по величине
>2-3 выбросы огибающей становятся
независимыми, и по величине
![]() можно определить средний период между
ложными тревогами:
можно определить средний период между
ложными тревогами:
![]() .
(8.30)
.
(8.30)
На практике поток ложных тревог полагают пуассоновским и для вероятности получения k выбросов за время наблюдения Tн пользуются выражением:
![]() (8.31)
(8.31)
Для вероятности получения числа тревог, меньшего m, пользуются выражением
![]() (8.32)
(8.32)
Где - среднее число ложных тревог в единицу времени. При k=0
![]() -
-![]() (8.33)
(8.33)
Где T0 – интерпретируется как среднее время, в течение которого с вероятностью Р(0) не произойдёт ни одной тревоги.
Вероятностные характеристики обнаружения многоканальных систем. Выше были рассмотрены характеристики обнаружения в случае воздействия на приемный тракт только одного сигнала, положение которого по пространству, частоте и времени было определенным. В реальных условиях на вход приемного устройства могут поступать сигналы от нескольких целей, положение которых по частоте и времени является различным. Кроме того, сигналы обладают неопределенностью положения и по направлению.
Обнаружение сигналов, обладающих неопределенностью положения, осуществляется многоканальными системами. При этом опрос каналов (разрешаемых элементов) осуществляется во времени либо одновременно (в ГАС с веером статически сформированных характеристик направленности), либо последовательно, но за время существования (во избежание пропуска) сигнала. Неопределенность сигнала по пространству и частоте устраняется обнаружением его в специальных каналах, для которых характерно наличие независимых схем обработки. ВХО таких каналов рассматривались выше. Неопределённость положения сигнала во времени устраняется этими же каналами за счёт выбора времени обзора элементов разрешения.
В
современных ГАС процесс обнаружения
объекта в подводной среде сопровождается
оценкой его координат в трех-, четырехмерном
пространстве измерений. Для этой цели
все пространство измерений разделяют
на элементы разрешения. Для гидролокатора
с формированием ДН в горизонтальной
плоскости
![]() и набором узкополосных фильтров
число таких элементов можно определить
по формуле
и набором узкополосных фильтров
число таких элементов можно определить
по формуле
![]() ,
где
,
где
![]() -
число пространственных каналов, равное
отношению полного азимутального
угла к разрешающей способности по
азимуту (ширине ДН на уровне 0,7 по
давлению);
-
число пространственных каналов, равное
отношению полного азимутального
угла к разрешающей способности по
азимуту (ширине ДН на уровне 0,7 по
давлению);
![]() -
число частотных каналов, равное
отношению общей полосы частот к полосе
одного фильтра;
-
число частотных каналов, равное
отношению общей полосы частот к полосе
одного фильтра;
![]() -
число элементов разрешения по дистанции,
равное отношению максимальной дальности,
соответствующей циклу обзора, к
разрешающей
-
число элементов разрешения по дистанции,
равное отношению максимальной дальности,
соответствующей циклу обзора, к
разрешающей
способности
по дистанции
![]() ,
эквивалентной длительности сигнала.
Таким образом, формула для подсчета
числа элементов разрешения имеет вид
,
эквивалентной длительности сигнала.
Таким образом, формула для подсчета
числа элементов разрешения имеет вид
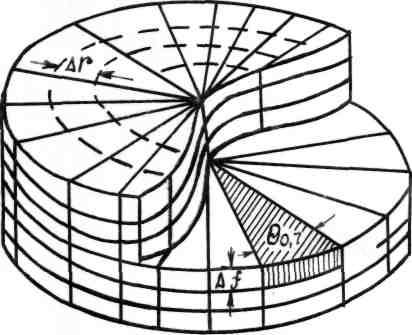
Рис. 8.4. Схема элементов разрешения гидролокатора
![]() (8.34)
(8.34)
Очевидно, что
параметры элементов разрешения
определяются диаграммами неопределённости
сигналов по измеряемым координатам,
описываемым в п.3.4. При расчётах ВХО
целей говорят об обнаружении «в точке»,
понимая под этим элемент разрешения.
Полный же цикл обзора состоит в осмотре
всех элементов разрешения. Нетрудно
показать, что при вероятности ложной
тревоги
![]() и независимости ложных тревог в различных
элементов вероятность ложной тревоги
за цикл связана с вероятностью ложных
тревог «в точке» соотношением
и независимости ложных тревог в различных
элементов вероятность ложной тревоги
за цикл связана с вероятностью ложных
тревог «в точке» соотношением
![]() (8.35)
(8.35)
При этом предполагается, что Рл.т. во всех элементах является одинаковой. Если в k-м элементе она равна Рл.т.к., то имеет место более общее соотношение
![]() (8.36)
(8.36)
Или
при условии, что
![]()
![]() (8.37)
(8.37)
На практике поток ложных тревог полагают пуассоновским, и для вероятности того, что за время Т в одной ячейке появится k, k<m, k=0 тревог, пользуются выражениями (8.31-8.33). Для М-канальной системы эти формулы принимают следующий вид:
![]() (8.38)
(8.38)
![]() (8.39)
(8.39)
![]() (8.40)
(8.40)
Эти соотношения позволяют решать целый ряд практических задач. Например, зная структуру тракта обработки и технические параметры каналов, можно по заданной Рл.т. в элементе разрешения определить вероятность того, что в течение интервала Т ложных тревог будет: k, k<m, ни одной. Или при заданной Рл.т. можно определить величину интервала Т, в течение которого с вероятностью Р ложных тревог будет k, k<m, ни одной.