

Регулировочные характеристики:
Якорное управление:
|
Опытные данные |
Расчетные данные | |||||
|
UУ , В |
UВ , В |
n, об/мин |
α |
v |
m | |
|
M1 = 0 | ||||||
|
125 |
300 |
481,8 |
0,25 |
0,25 |
0 | |
|
250 |
300 |
968,6 |
0,5 |
0,5 |
0 | |
|
375 |
300 |
1455 |
0,75 |
0,75 |
0 | |
|
500 |
300 |
1942 |
1,0 |
1,0 |
0 | |
|
M2 = MН | ||||||
|
125 |
300 |
289,9 |
0,25 |
0,152 |
0,098 | |
|
250 |
300 |
776,7 |
0,5 |
0,402 |
0,098 | |
|
375 |
300 |
1263 |
0,75 |
0,652 |
0,098 | |
|
500 |
300 |
1750 |
1,0 |
0,902 |
0,098 | |
|
M3 = MП / 4 | ||||||
|
125 |
300 |
0 |
0,25 |
0 |
0,25 | |
|
250 |
300 |
478,9 |
0,5 |
0,25 |
0,25 | |
|
375 |
300 |
965,6 |
0,75 |
0,5 |
0,25 | |
|
500 |
300 |
1452 |
1,0 |
0,75 |
0,25 | |
|
М4 = МП / 2 | ||||||
|
125 |
300 |
-501,8 |
0,25 |
-0,25 |
0,5 | |
|
250 |
300 |
-15,04 |
0,5 |
0 |
0,5 | |
|
375 |
300 |
461,8 |
0,75 |
0,25 |
0,5 | |
|
500 |
300 |
948,6 |
1,0 |
0,5 |
0,5 | |
Полюсное управление:
|
Опытные данные |
Расчетные данные | |||||
|
UУ , В |
UВ , В |
n, об/мин |
α |
v |
m | |
|
M1 = 0 | ||||||
|
75 |
500 |
7610 |
0,25 |
4 |
0 | |
|
150 |
500 |
3864 |
0,5 |
2 |
0 | |
|
225 |
500 |
2586 |
0,75 |
1,333 |
0 | |
|
300 |
500 |
1942 |
1,0 |
1 |
0 | |
|
M2 = MН | ||||||
|
75 |
500 |
4578 |
0,25 |
2,433 |
0,098 | |
|
150 |
500 |
3099 |
0,5 |
1,608 |
0,098 | |
|
225 |
500 |
2245 |
0,75 |
1,159 |
0,098 | |
|
300 |
500 |
1750 |
1,0 |
0,902 |
0,098 | |
|
M3 = MП / 4 | ||||||
|
75 |
500 |
0 |
0,25 |
0 |
0,25 | |
|
150 |
500 |
1910 |
0,5 |
1 |
0,25 | |
|
225 |
500 |
1716 |
0,75 |
0,889 |
0,25 | |
|
300 |
500 |
1452 |
1,0 |
0,75 |
0,25 | |
|
М4 = МП / 2 | ||||||
|
75 |
500 |
-7926 |
0,25 |
-4 |
0,5 | |
|
150 |
500 |
0 |
0,5 |
0 |
0,5 | |
|
225 |
500 |
820,4 |
0,75 |
0,444 |
0,5 | |
|
300 |
500 |
948,5 |
1,0 |
0,5 |
0,5 | |
Характеристики двигателя на основании проведенных опытов
Механические характеристики
с якорным управлением:

с полюсным управлением:

Регулировочные характеристики
с якорным управлением:

с полюсным управлением:

Зависимость мощности управления и механической мощности от относительной скорости вращения при якорном управлении:


Полная механическая мощность для полюсного управления:

Зависимость КПД двигателя от нагрузки:
с якорным управлением:

с полюсным управлением

Запуск двигателя с помощью трехступенчатого пускового устройства:
Для того чтобы двигатель по окончании разгона вышел в номинальный режим работы, принимаем:

R1=2,0 Ом,
t1=0,62с,
R2=0,9049 Ом,
t2=0,71 с,
R3=0,4095 Ом,
t3=0,8 с.
График изменения тока якорной цепи:
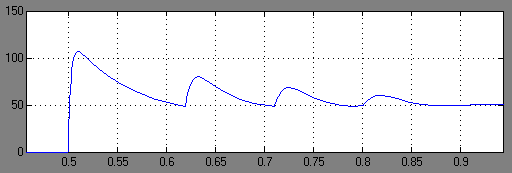
График изменения электромагнитного момента якорной цепи:

График изменения скорости якорной цепи:

3. Выполнить расчеты лабораторной работы «Система управления
подъемным устройством».
Масса кабины 820 кг, масса груза 4141 кг, максимальная скорость лифта 230 см/с, КПД нагрузки 91%, КПД редуктора 86%. Грузоподъемный механизм с противовесом.
Находим КПД

Рассчитываем массу противовеса:

Для расчёта требуемой статической мощности двигателя необходимо найти эквивалентную массу нагрузки при полной загрузке и при пустой лебедки:


Таким образом, если лебедка пустая или загружена менее чем на 2070,5 кг, двигатель работает в генераторном режиме.
Время разгона:

Выберем скорость
позиционирования
 в
10 раз меньше основной скорости перемещения.
Время позиционирования примем
в
10 раз меньше основной скорости перемещения.
Время позиционирования примем с.
с.
Время перехода на скорость установления уровня определяется замедлением:

Время торможения определяется аналогично:

Рассчитаем тормозной путь:

Пути, который лебедка проходит во время перехода с постоянной скорости движения на скорость установления уровня, определяется по следующей формуле:

Путь, который лебедка проходит за время движения со скоростью установления уровня:


Тормозной путь:

Рассчитаем статическую мощность:

Момент нагрузки без учета КПД:

г Так как двигатель еще не выбран, а значит, значение nN еще не известно, для расчета примем nN=1400 мин-1.
Момент нагрузки тогда:

Для определения номинальной мощности электродвигателя необходимо также знать величину динамической мощности.
Рассчитаем динамическую мощность без учета момента инерции ротора двигателя:

Без учета мощности на ускорение ротора, которая еще не определена, полная мощность двигателя будет равна:

Расчетное передаточное число редуктора

Необходимо выбрать
передаточное число редуктора меньше
полученного значения для обеспечения
максимальной скорости движения. Так
как это только предварительный расчет
и ещё не выбран двигатель, примем
передаточное число редуктора .
Произведем пересчет скорости вращения
двигателя
.
Произведем пересчет скорости вращения
двигателя во
время подъема (опускания) груза, чтобы
компенсировать отличие передаточного
числа выбранного редуктора и расчетного:
во
время подъема (опускания) груза, чтобы
компенсировать отличие передаточного
числа выбранного редуктора и расчетного:

Рассчитаем количество оборотов ротора двигателя в минуту:

Движение вверх при полной загрузке
Рассчитаем внешний момент инерции для случая движения вверх при полной загрузке:

Статический момент:

Статическая мощность:
Рассчитаем динамический момент при разгоне:

Рассчитаем мощность при разгоне:

Динамический момент при торможении:

Динамическая мощность при торможении:

Движение вверх при отсутствии груза
Внешний момент инерции для случая движения вверх при отсутствии груза:

Статический момент:

Статическая мощность:
Рассчитаем мощность при разгоне:

Мощность при разгоне:
Динамический момент при торможении:

Динамическая мощность при торможении:

Движение вниз при отсутствии груза
Статический момент:

Статическая мощность

Рассчитаем динамический момент при разгоне:

Рассчитаем мощность при разгоне:

Динамический момент при торможении:

Динамическая мощность при торможении:

Движение вниз при полной загрузке
Статический момент:

Статическая мощность

Рассчитаем динамический момент при разгоне:

Рассчитаем мощность при разгоне:

Динамический момент при торможении:

Динамическая мощность при торможении:

Статические мощности заносим в таблицу:
|
|
С грузом вверх |
Без груза |
С грузом вниз |
Без груза вниз |
|
Статическая мощность, кВт |
59,633 |
-36,523 |
-36,523 |
59,633 |
|
Статическая + динамическая мощность при разгоне, кВт |
64,346 |
-34,244 |
-31,81 |
61,912 |
|
Статическая + динамическая мощность при торможении, кВт |
56,709 |
-37,957 |
-39,448 |
58,199 |