

-
Запись видеоролика
Иногда удобно демонстрировать результаты моделирования в виде видеоролика. Чтобы записать видеоролик, необходимо выполнить следующие действия:
-
В меню анимационного окна программного пакета UM Simulation выбрать пункт Копировать.
-
В появившемся списке выбрать Анимация.
-
Появится окно настроек анимации (рис. 1.33). В этом окне необходимо поставить галочку Записать анимацию.

Рис. 1.33. Окно настроек анимации
-
Установить свойства анимации (тип, шаг копирования, имя файла и масштаб времени).
-
Нажать кнопку Принять.
-
Запустить моделирование. По окончании процесса моделирования произойдет копирование информации в видеофайл.
Полученный видофайл будет находиться в каталоге модели.
Заключение
В заключение следует отметить, что изучив данное методическое пособие, пользователь овладеет основными приемами работы в такой мощной среде моделирования, как Универсальный механизм, а также научится подключать к данному программному комплексу такие пакеты, как Matlab/Simulink и Компас, что значительно расширяет возможности Универсального механизма. Следует также сказать, что в рамках представленного учебного пособия были рассмотрены только основные возможности ПК УМ. Для более детального изучения программного пакета и его дополнительных возможностей рекомендуется использовать Руководство пользователя, которое можно найти, открыв пункт меню Справка.
-
Применение программного комплекса «Универсальный механизм» для моделирования трехстепенного манипуляционного робота
В разделе 1 представлены основные приемы работы в ПК УМ. В качестве примера его использования выполним моделирование манипуляционного робота типа «SCARA», кинематическая схема которого представлена на рис. 2.1. Из рисунка видно, что этот механизм имеет три степени подвижности, определяемые одним линейным (телескопическим) относительным перемещением и двумя вращательными. Масс-инерционные характеристики звеньев приведены в таблице 2.1.
Математическая модель привода первого звена рассматривается с абсолютно жесткой механической передачей. Структурная схема привода, разработанная в среде Matlab Simulink, приведена на рис. 2.2. Модель привода второго звена учитывает упругие свойства механической передачи. Структурная схема модели изображена на рис. 2.3. Модель третьего привода полностью совпадает с моделью второго.
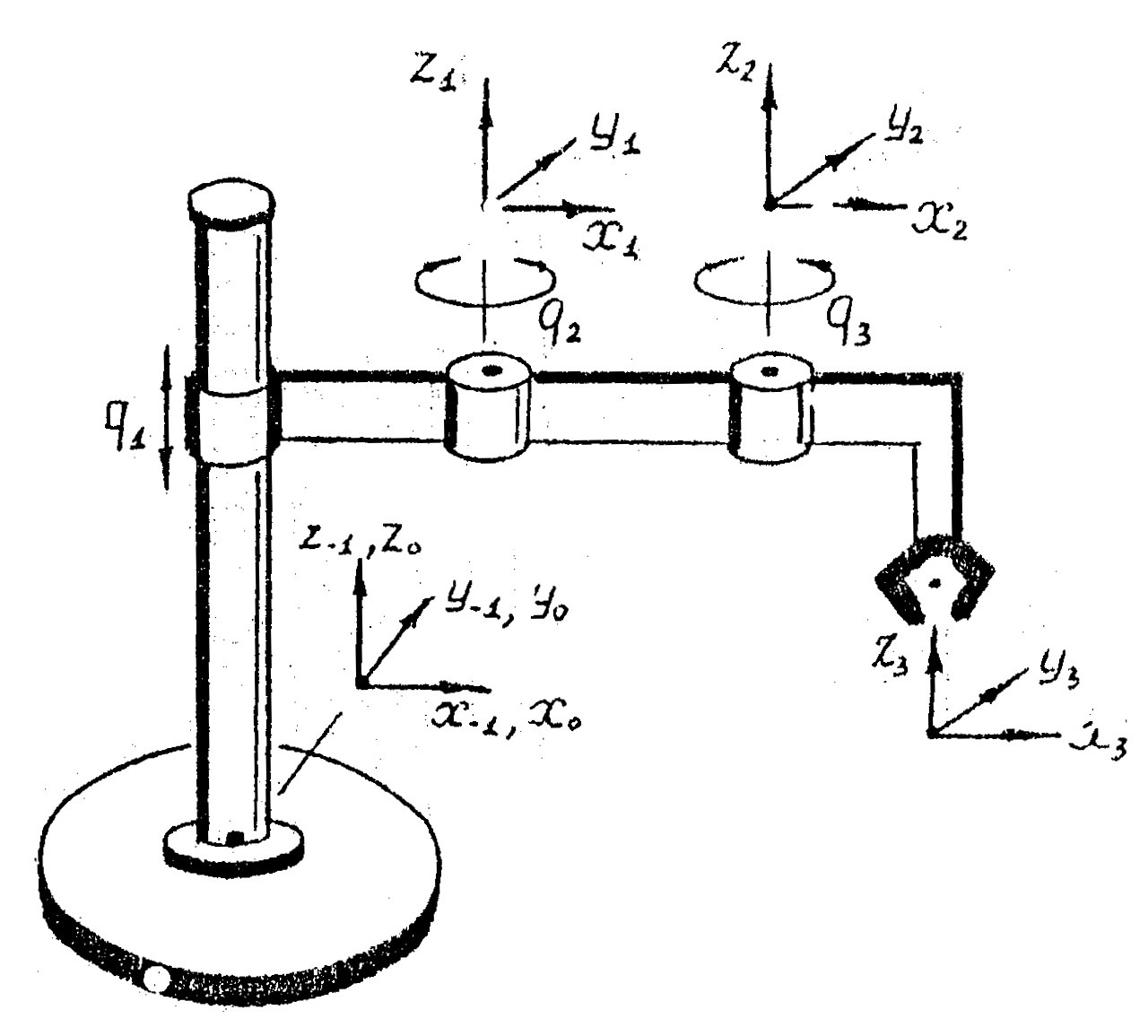
Рис. 2.1. Кинематическая схема манипуляционного робота
Таблица 2.1. Масс-инерционные характеристики звеньев
|
Звено |
m |
rx |
ry |
rz |
Ixx |
Iyy |
Izz |
Ixy |
Ixz |
Iyz |
|
Звено 1 |
116 |
-0.136 |
0 |
-0.025 |
16 |
22 |
6 |
0 |
0 |
0 |
|
Звено 2 |
53 |
-0.162 |
0 |
0.218 |
5.3 |
10 |
5 |
0 |
0 |
0 |
|
Звено 3 |
47 |
-0.025 |
0 |
0.6 |
3.8 |
4.7 |
0.9 |
0 |
0 |
0 |
Здесь m – масса звена; (rx, ry, rz) – координаты центров масс в связанных системах координат; (Ixx, Iyy, Izz, Ixy, Ixz, Iyz) – моменты инерции звеньев.

Рис. 2.2. Структурная схема первого привода

Рис. 2.3. Структурная схема второго и третьего приводов
В предлагаемом примере рассмотрена задача определения переходных процессов при повороте второго звена на 90º.
Для того, чтобы построить обобщенную динамическую модель трехзвенного манипуляционного механизма, нужно последовательно выполнить следующие действия:
-
В ПК УМ создать графические образы звеньев механизма;
-
создать тела звеньев;
-
назначить шарниры, соединяющие звенья;
-
в шарнирах указать идентификаторы сил и моментов, передаваемых приводами;
-
в ПК Matlab Simulink в одном файле создать модели всех трех приводов (как показано на рис. 2.2, 2.3);
-
создать DLL-библиотеку с помощью одного из указанных ранее компиляторов;
-
подключить DLL-библиотеку к ранее разработанной динамической модели манипулятора.
На рис. 2.4 показана полученная динамическая модель трехстепенного манипулятора.

Рис. 2.4. Динамическая модель трехстепеного манипулятора
На рис. 2.5 показаны переходные процессы (положение, скорость и ускорение), полученные при повороте второго звена механизма на 90º. А на рис. 2.6 – 2.8 приведены графики взаимовлияния второго звена на третье (положение, скорость и ускорение).
положение
скорость
ускорение



Рис. 2.5. Переходные процессы при повороте второго звена на 90º

Рис. 2.6. Взаимовлияние приводов. Положение

Рис. 2.7. Взаимовлияние приводов. Скорость

Рис. 2.8. Взаимовлияние приводов. Ускорение
Если в полученной динамической модели изменять значение какого-либо параметра манипуляционного робота, то можно выяснить зависимость качества его работы от этого параметра.