

1.2 Завдання|задавання| для самостійної роботи
Необхідно|треба| виконати і|та| зафіксувати в звіті по лабораторній роботі наступні|такі| завдання|задачі|:
1) для моделі об'єкту управління другого порядку|ладу| із|із| запізнюванням, із|із| заданими викладачем параметрами, або заданою кривою розгону розрахувати спрощеним методом ПІ- і ПІД- регулятор;
2) створити в програмі Simulink (MatLab) замкнуту систему, підключивши регулятор до заданної моделі|вихідного| об'єкту (не апроксимованої!);
3) провести дослідження перехідних процесів в замкнутій системі при ступінчастій|східчастій| зміні задаючої дії і|та| окремо при дії збурення|збурення|. Варіюючи параметр налаштування фільтру (1.6) отримати прийнятну|допустима| якість управління (задається викладачем);
4) порівняти отримані результати роботи ПІ- і ПІД-регулятора;
5) зробити висновки по роботі.
а)
б)
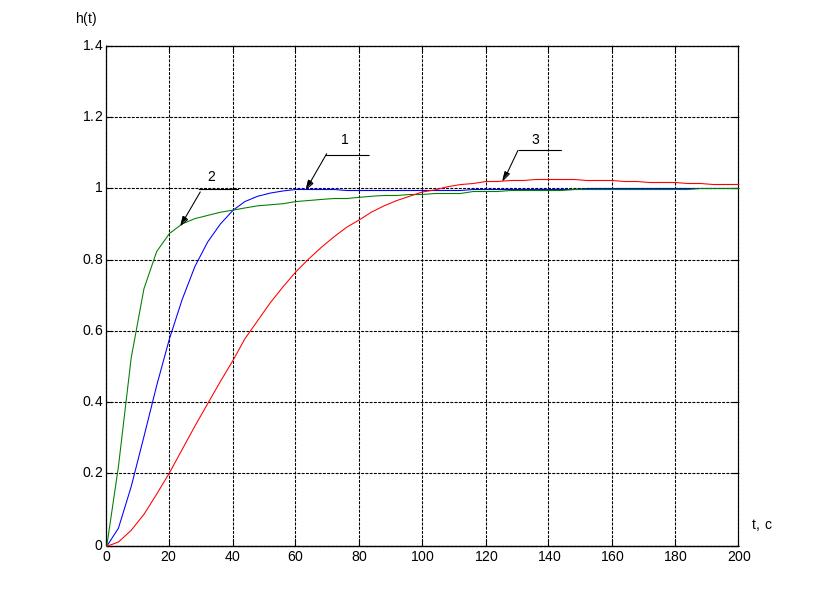
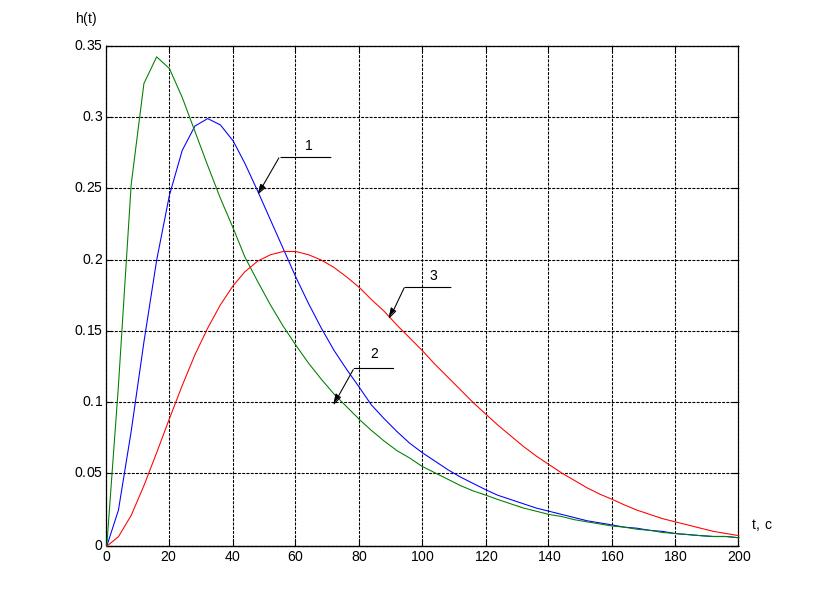
Рисунок 1.6 - Графіки перехідних процесів ПІД-регулятора а) - за завданням і|та| б) - за збуренням|збуренню|, де:
1 - з|із| номінальними значеннями K = 1, T1 = 10, T2 = 26;
2 – з|із| номінальними значеннями K = 1.5, T1 = 5, T2 = 13;
3 – з|із| номінальними значеннями K = 0.5, T1 = 15, T2 = 39
1.3 Контрольні ПиТання
Основне завдання|задача| регулятора. Що таке робастний| регулятор?
Призначення П| складової в регуляторі. Як вона впливає на процес?
Призначення І|та| складової. Як вона впливає на процес?
Призначення Д| складової. Як вона впливає на процес?
Назвіть|накликайте| можливі невизначеності, які можуть виникнути в процесі проектування системи управління.
Назвіть|накликайте| переваги використання регуляторів з|із| невзаємопов'язаною формою.
Назвіть|накликайте| переваги використання регуляторів зі|із| взаємопов'язаною формою.
Визначте параметри ПІД-регулятора паралельної форми (1.5), якщо відомі параметри регулятора взаємопов’язаної форми.
Поясніть суть спрощеної процедури налаштування ПІ- або ПІД- регулятора по еталонній моделі процесу.
Назвіть|накликайте| відомі методи налаштування ПІ- і ПІД-регуляторів. Порівняйте їх з|із| методом спрощеного налаштування.
Які з|із| відомих вам форм представлення ПІД-регуляторів застосовані в промислових контролерах (Реміконт Р|-130, Протар 100, Мік-25/51, Мінітерм 450, МТМ 620, Овен ТРМ-151)?
Проведіть процедуру спрощеного налаштування ПІ- або ПІД-регулятора, якщо процес описуватиметься коливальною ланкою (чи інтегро|-диференцюючою ланкою).
Лабораторна робота № 2. Управління об'єктами Із|із| запізнюванням
Мета|ціль| роботи: дослідження систем управління з|із| компенсацією транспортного запізнювання за способом Сміта.
2.1 Теоретичні відомості
У багатьох технологічних процесах хімічної промисловості, металургії, нафтохімії та ін. часто зустрічається вид|вигляд| запізнювання, що називається транспортним. Таке запізнювання утворюється тоді, коли в технологічному процесі речовина, енергія і тому подібне|тощо,абощо| переміщаються з|із| певною швидкістю з|із| однієї точки|крапки| в іншу без якої-небудь зміни його властивостей і|та| характеристик.
Наявність чистого запізнювання в технологічних об'єктах призводить до того, що сигнал на виході об'єкту впродовж деякого часу після зміни вхідної дії залишається незмінним.
Запізнювання дуже сильно впливає не лише|не| на стійкість системи, але і на час регулювання, тобто тривалість перехідного процесу системи після початку відхилення регульованого процесу. Запізнювання подовжують перехідні процеси автоматичних систем. Нерідко|незрідка| в замкнутих системах запізнювання можуть створювати автоколивання або призводити до нестійкості [5].
У зв'язку з цим завжди бажано прагнути до зниження запізнювання, а для цього необхідно|треба| міняти|замінювати,змінювати| технологію процесу, що не завжди реалізовується. Тому доводиться удосконалювати|вдосконалювати| алгоритми функціонування автоматичних регуляторів, застосовувати регулятори із|із| складнішим законом регулювання, ускладнювати схему регулювання і/або збільшувати кількість встановлюваних регуляторів.
Нині|в| відомі декілька методів синтезу оптимальних по швидкодії систем управління об'єктами із|із| запізнюванням заснованих на безпосередній компенсації впливу запізнювання на стійкість усієї системи.
Більшості процедур синтезу регуляторів для об'єктів із|із| запізнюванням властиво використання прогнозуючого блоку для компенсації впливу запізнювання в контурі управління. Застосування|вживання| такого блоку дозволяє «виносити» запізнювання із|із| замкнутого контура і|та| застосовувати для синтезу ті ж методи, що і у разі|в| об'єкту без запізнювання. Найвідомішими з|із| них є регулятор Ресвіка і|та| попереджувач| Сміта.
В цьому випадку застосовують схему з|із| додатковим зворотним зв'язком, що містить|утримує| пристрій упередження або лінійний упереджувач| Сміта (предіктор) [5]. Цей спосіб нейтралізації впливу запізнювання в об'єкті на динаміку процесу полягає в тому, що час запізнювання як би виключається при розрахунку налаштувань основного регулятора |та|і вводитьс|запроваджує|я лише після розрахунку усієї іншо|останньої|ї частин|частки|и системи управління [5]. Це може бути досягнуто при охопленн|обхваті|і ланцюг|цепу|а регулятора |із|з передатно|передавальною|ю функцією Wp(p) додатковим зворотним зв'язком, що має передатн|передавальну|у функцію
![]() .
.
Передатна|передавальна| функція ланцюга|цепу| регулятора обирається так, щоб забезпечити найкращу|щонайкращу,якнайкращу| якість регулювання об'єктом, що містить|утримує| тільки|лише| одну ланку Wо(p).
Додатковий зворотний зв'язок формує сигнал, ідентичний такому сигналу, який з часом|згодом| з'явиться|появлятиметься| на виході системи, і|та| подає його на вхід регулятора до тих пір, поки не з'явиться|появлятиметься| сигнал з|із| головного|чільного| ланцюга|цепу| зворотного зв'язку. Як тільки|як| він з'явиться|появлятиметься|, сигнал з|із| предиктора| стане дорівнювати нулю.
За наявності предиктора| передатн|передавальна|а функція регулятора |із|з попереджувачем| стає рівною
![]()
Передатна|передавальна| функція системи регулювання з|із| предиктором| буде визначаться |із|з рівняння
Якщо передатна|передавальна| функція регулятора вибрана таким чином, що забезпечуються мінімальні значення статичною і|та| динамічною помилок в системі, що містить|утримує| об'єкт без запізнювання, то за наявності запізнювання якість перехідного процесу не зміниться, а станеться|відбудеться| лише зміщення|зсув| вихідної величини y за часом на значення, рівне τ.
Якщо блок Wо(p) в ланцюзі|цепі| додаткового зворотного зв'язку не точно відтворює функцію Wо(p) реального об'єкту, то в системі з'являється|появляється| перехідний процес, оскільки|тому| сигнал зворотного зв'язку, що коригує, в цьому випадку не відповідає дійсному|справжньому| сигналу [6]. Структурна схема замкнутої системи з|із| предиктором| Сміта приведена на рисунку 2.1.
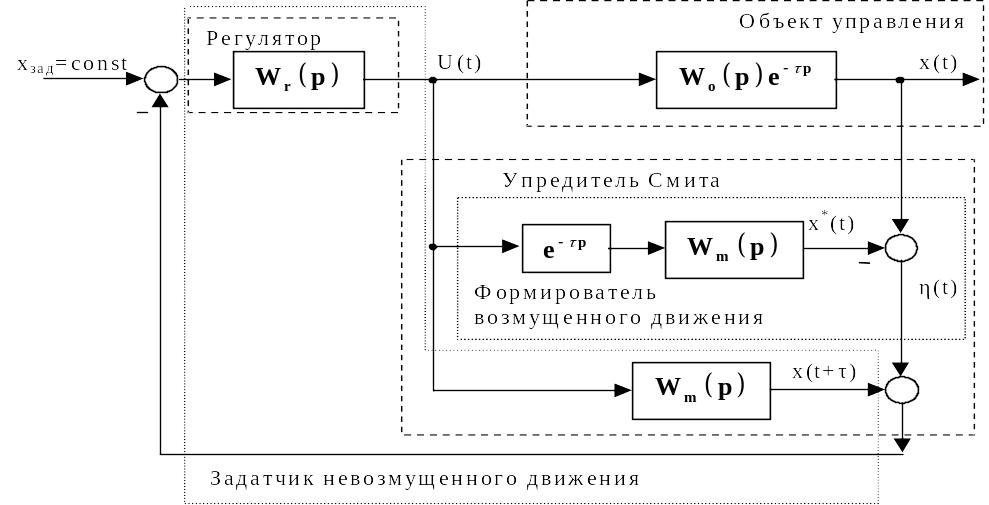
Рисунок 2.1 - Структурна схема системи з|із| предиктором| Сміта