

A2(2,6) - идентификатор входного вещественного двумерного массива, элементами которого являются следующие параметры группы
А2(2,6)
=
![]() ;
;
A3(7) - идентификатор выходного вещественного массива, элементами которого являются следующие параметры группы
А3(7)
= (![]() );
);
А4(3,6) - - идентификатор выходного вещественного трехмерного массива, элементами которого являются следующие параметры группы
А4(3,6)
=
![]() ;
;
Р(4) - идентификатор входного вещественного массива, элементами которого являются управляющие переменные
Р(4) = (Р1, Р2, Р3, Р4);
К – идентификатор входной целой переменной, соответствующий коэффициенту сборки к группы.
Если все элементы массива Р(4) больше нуля, то вычисляются все кинематические параметры группы.
Если Р(1) < 0 – отсутствует точка D.
Если Р(2) < 0 – отсутствует точка Е.
Если Р(3) < 0 – вычисляются только координаты точек D, E, C и углы , и .
Если Р(4) < 0 – вычисляются координаты точек D, E, C и углы , и , а также скоростные параметры группы.
4 МЕТОДИКА СОСТАВЛЕНИЯ АЛГОРИТМА И ПРОГРАММЫ
КИНЕМАТИЧЕСКОГО АНАЛИЗА ДВУХПОВОДКВОЙ ГРУППЫ С ВНЕШНЕЙ ПОСТУПАТЕЛЬНОЙ ПАРОЙ
При кинематическом анализе рассматриваемой структурной группы должны быть заданы следующие параметры в соответствии с рисунком 4:
координаты, проекции векторов скоростей и ускорений кинематической пары А, которой группа присоединяется к механизму:
![]() ;
;
координаты, проекции векторов скоростей и ускорений точки Е, принадлежащей направляющей ползуна:
![]() ;
;
угловые характеристики направляющей ползуна:
![]() ;
;
линейные и угловые размеры звеньев группы: l, d и ;
координаты
произвольной точки С
в системе подвижных координат
![]() ,
связанных со звеном АВ;
,
связанных со звеном АВ;
коэффициент k.
Коэффициент k определяет координаты кинематической пары В относительно кинематической пары А и принимает значения . Коэффициент k принимает значение +1, если при обходе на рисунке 4 контура, образованного точками А, F, D и В, против движения часовой стрелки последовательно встречаются вершины А, F, D и В или А,F,B и D, в противном случае – k = -1. Точка F – точка пересечения перпендикуляра, опущенного из точки А, и направляющей ползуна.
В результате расчета определяются:
координаты,
проекции векторов скоростей и ускорений
кинематической пары
![]() ,
точек
,
точек
![]() и
и
![]() :
:
![]() ;
;![]() ;
;![]() ;
;
угловые параметры группы:
![]()
Вычисление кинематических характеристик группы осуществляется по алгоритму 3.
В алгоритме предусмотрена проверка существования сборки звеньев группы - формула 3, которая необходима, например, в алгоритмах синтеза механизмов, для выявления ошибок ввода. Если группа не собирается, т.е. нет точки В, то значению присваивается большое отрицательное значение, которое выводится на печать.
В алгоритме предусмотрена проверка выполнения различных требований: наличие произвольной точки ; определение только координат точек звеньев и положений звеньев; окончание расчета определением скоростных характеристик. Эти требования обеспечиваются логическими выражениями, обозначенными в алгоритме 3 формулами 12, 15, 23, 26, 34, которые соответствуют операторам условного перехода на применяемом алгоритмическом языке.
Алгоритм 3 оформлен в виде подпрограммы с именем КАГ2 и составлена инструкция по ее применению.
Алгоритм 3 - Кинематический анализ двухповодковой группы с внешней поступательной парой
 ;
; ;
;Если
 то на М4;
то на М4;
 ;
; ;
; ;
; ;
; ;
; ;
;Если , то переход на метку ;
 ;
; ;
;: если , то переход на метку M3;
 ;
; ;
; ;
; ;
; ;
; ;
; ;
;Если , то переход на метку M2;
 ;
; ;
;M2: если
 , то переход на метку M3;
, то переход на метку M3;
 ;
; ;
; ;
; ;
; ;
; ;
;Если , то переход на метку M3;
 ;
; ;
;Переход на метку M3;
М4:
 и вывод на печать: сборки не существует;
и вывод на печать: сборки не существует;M3: конец алгоритма.
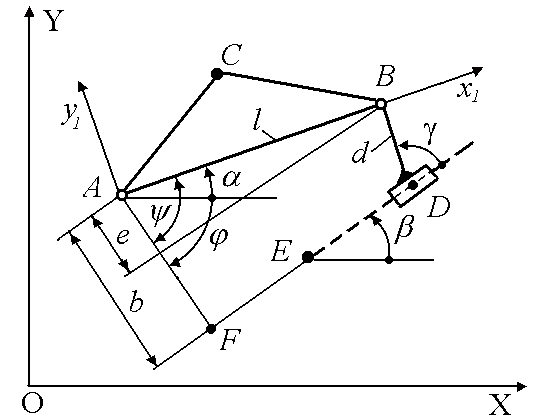
Рисунок 4 – Расчетная схема двухповодковой группы с внешней
поступательной парой.
Инструкция к подпрограмме кинематического КАГ2 анализа
двухповодковой группы с внешней поступательной парой
ПОДПРОГРАММА КАГ2 (А1, А2, А3, А4, Р, К),
где А1(8) – идентификатор входного вещественного массива, элементами которого являются следующие параметры группы
А1(8)
= (![]() );
);