

Зміст.
Завдання на курсовий проект 3
1. Кінематичне дослідження шарнірно-важільного механізму 4
1.1 Структурний аналіз механізму 4
1.2. Побудова планів положень механізму 5
1.3 Побудова діаграм переміщення, швидкості, прискорення повзуна 5
1.4 Побудова планів швидкостей механізму 6
1.5 Побудова планів прискорень механізму 8
2. Силове дослідження механізму 10
2.1 Визначення зовнішніх сил 10
2.2. Силовий розрахунок групи Ассура 5-6 10
2.3 Силовий розрахунок групи Ассура 3-4 11
2.4 Силове дослідження вихідного механізму 12
3. Синтез кулачкового механізму 13
3.1 Побудова діаграм зміни руху вихідної ланки 13
3.2 Визначення мінімального радіуса кулачка 13
3.3 Побудова профілю кулачка 13
3.4 Побудова механізму, що замінює 14
3.5 Визначення швидкості механізму, що замінює 14
4. Визначення моменту інерції маховика 15
4.1 Визначення приведеного моменту сил корисного опору 15
4.2 Побудова діаграм робіт 15
4.3 Побудова діаграми зміни кінетичної енергії механізму 15
4.4 Визначення приведених моментів інерції машини без маховика 15
4.5 Визначення моменту інерції маховика 16
4.6 Визначення розмірів маховика 16
5. Розрахунок зубчастої передачі 17
5.1 Розрахунок геометричних параметрів евольвентної циліндричної
передачі зовнішнього зачеплення 17
5.2 Перевірка геометричних умов існування передачі 18
Список літератури 20
Завдання на курсовий проект
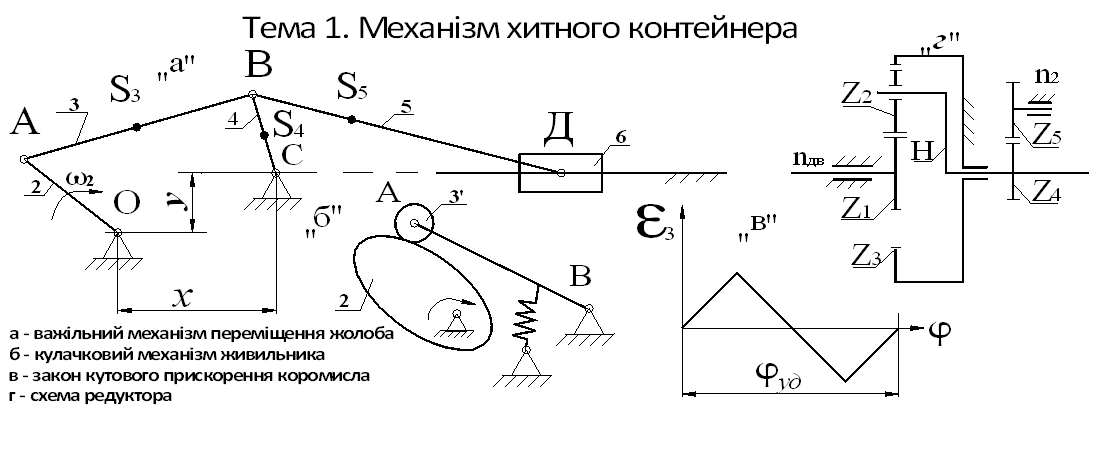
Тема 1
Механізм хитного конвеєра.
Варіант 6

Параметри
Розміри ланок lОА = 0,12 м
lAS3 = 0,5lАВ; lВS4 =0,5 lBС lАВ = 0,55 м
lВS5 =0,5 lВD lBС =0,4 м
х = 0,41; у = 0,07
lВD = 1,5 м
Частота обертання колін валу й кулачка п2 = пк = 79 об/хв
Маси ланок m3 = 18 кг; m4 = 22 кг
m5 = 100 кг; m6 = 450 кг
Маса матеріалу mМ = 900 кг
Моменти інерції ланок JS5 =45кг м2;JS3=0,5кг м2
JS2 = JS4 = 1,2 кг м2
Сила опору риштака Роп..пр = 1,5 кН
Сила опору зворотного руху Роп.. ор = 4 кН
Коефіцієнт нерівномірності обертання δ = 0,08
Числа зубів зубчастої передачі Z4 = 14; Z5 = 45
Модуль передачі m = 7 мм
Довжина коромисла lАВ = 110 мм
Кутовий хід коромисла ψ = 220
Фазові кути повороту кулачка φуд = φсб = 700 ;φдс = 400
Кут тиску [δ]= 300
1. Кінематичне дослідження шарнірно-важільного механізму
1.1 Структурний аналіз механізму
Ухвалюємо наступні основні позначення ланок механізму:
1 – стійка ; 2 – кривошип ОА; 3 – шатун АВ;
4 – коромисло ВС; 5 – шатун ВD; 6 – повзун D
Кількість рухливих ланок 5.
Визначаємо ступінь рухливості механізму по формулі П.Л.Чебишева
 ,
де
,
де
n = 5 – число рухливих ланок
 - число
кінематичних пар 5 класу
- число
кінематичних пар 5 класу
 - число
кінематичних пар 4 класу
- число
кінематичних пар 4 класу

Таблиця 1.1.
Характеристика кінематичних пар
№ п/п |
Позначення пари |
Номера ланок утворюючих пари |
Назва ланок утворюючих пари |
Вид руху в парі |
Клас пари |
|
|
т. О |
1 – 2 |
стійка - кривошип |
обертальний |
5 |
|
|
т. А |
2 - 3 |
кривошип – шатун |
обертальний |
5 |
|
|
т. В |
3 – 4 |
шатун - коромисло |
обертальний |
5 |
|
|
т. В' |
4 -5 |
шатун – шатун |
обертальний |
5 |
|
|
т. С |
4 - 1 |
коромисло - стійка |
обертальний |
5 |
|
|
т. D |
5 – 6 |
шатун - повзун |
обертальний |
5 |
|
|
т. D' |
6 - 1 |
повзун - стійка |
поступальний |
5 |
Розкладання механізму на групи Ассура:
 Виділяємо
вихідний механізм, який складається зі
стійки 1 і кривошипа 2
Виділяємо
вихідний механізм, який складається зі
стійки 1 і кривошипа 2
Визначимо
ступінь рухливості

Група Ассура 3-4 Група Ассура 5-6

II клас, I вид, II порядок II клас, II вид, II порядок
Визначимо ступеню рухливості двох виділених груп
=3 ·2 – 2 ·3 = 0
Увесь механізм, по класифікації І.І. Артоболевського - II, тому що утворений групами Ассура II класу.
1.2. Побудова планів положень механізму
Кінематичну схему механізму будуємо в масштабі
μl = lВD /BD = 1,5/300 = 0,0064м/мм
де lВD – дійсна довжина шатуна BD, м
BD – довжина відрізка, що зображує шатун 5 на плані положень, мм
Інші відрізки кінематичної схеми
ОА = lОА /μl = 0,12/0,005 = 24 мм
АВ = lАВ /μl = 0,55/0,005 = 110 мм
ВР = lВС /μl = 0,4/0,005 = 80 мм
Х = х/μl = 0,41/0,005 = 82 мм
В = в/μl = 0,07/0,005 = 14 мм
Центри мас шатунів 3, 4 і 5 лежать на середині ланок АВ, ВС і ВD, тобто
lАS3 / lАB = lcs4 / lВC = lВS4 / lВD = 0,5
Побудова планів положень починаємо з визначення крайніх положень механізму
І положення: ОА + АВ = 24 + 110 = 134 мм
ІІ положення: АВ - ОА = 110 - 24 = 86 мм
Розбиваємо повний оберт кривошипа на 8 частин і будуємо 8 положень усього механізму.