

1.6. Сегмент споживача.
1.6.1 Навігаційна апаратура споживачів
Складається з навігаційних приймачів і пристроїв обробки, призначених для прийому навігаційних сигналів супутників та обчислення власних координат, швидкості і часу.

Рис 5.1 Автомобільна навігаційна апаратура "Авто-Ка"
1.6.1 Приймач GPS / ГЛОНАСС.
Приймач можна розділити на три функціональні частини:
радіочастотну частина;
цифровий корелятор;
процесор.
З виходу антенно-фідерного пристрою (антени) сигнал надходить в радіочастотну частину. Основне завдання цієї частини полягає в підсиленні вхідного сигналу, фільтрації, перетворення частоти та аналогового-цифрового перетворення. Крім цього, з радіочастотної частини приймача надходить тактова частота цифрові відліки вхідного сигналу для цифрової частини приймача.
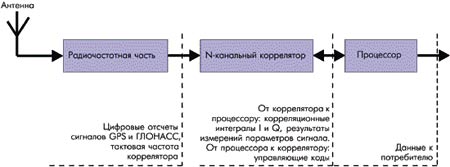
Рис 6.1 Узагальнена структура приймача
У кореляторі спектр сигналу переноситься на "нульову" частоту. Це проводиться шляхом перемноження вхідного сигналу корелятора з опорним гармонічним коливанням в синфазному і квадратурному каналах. Далі результат перемноження проходить кореляційну обробку шляхом перемноження з опорним далекомірним кодом і накопиченням на періоді далекомірного коду. У підсумку отримуємо кореляційні інтеграли I і Q. Відліки кореляційних інтегралів надходять у процесор для подальшої обробки і замикання петель ФАП (фазова автопідстройка) і ССЗ (схема стеження за затримкою). Вимірювання параметрів сигналу в приймачі виконуються не безпосередньо по вхідному сигналу, а по її точній копії, що формується системами ФАП і ССЗ. Кореляційні інтеграли I і Q дозволяють оцінити ступінь "схожості" (корельованості) опорного і вхідного сигналів. Завдання корелятора, крім формування інтегралів I і Q, - формувати опорний сигнал, згідно з керуючими впливами (кодами управління), які надходять з процесора. Крім того, в деяких приймачах корелятор формує необхідні вимірювання опорних сигналів і передає їх у процесор для подальшої обробки. У той же час, так як опорні сигнали в кореляторі формуються по керуючим кодами, що надходять з процесора, то необхідні вимірювання опорних сигналів можна проводити безпосередньо в процесорі, обробляючи відповідним чином керуючі коди, що і робиться в багатьох сучасних приймачах.
Які параметри сигналу вимірює корелятор (процесор)?
Дальність при радіотехнічних вимірах характеризується часом поширення сигналу від об'єкта вимірювання до вимірювального пункту. У навігаційних системах GPS / ГЛОНАСС випромінювання сигналів синхронізовано зі шкалою часу системи, точніше, зі шкалою часу супутника, що випромінює даний сигнал. У той же час, споживач має інформацію про розбіжність шкали часу супутника і системи. Цифрова інформація, передана з супутника, дозволяє встановити момент випромінювання деякого фрагмента сигналу (мітки часу) супутником у системному часу. Момент прийому цього фрагмента визначається за шкалою часу приймача. Шкала часу приймача (споживача) формується за допомогою кварцових стандартів частоти, тому спостерігається постійний "догляд" шкали часу приймача щодо шкали часу системи. Різниця між моментом прийому фрагмента сигналу і моментом випромінювання його супутником, помножена на швидкість світла, називається псевдо відстань . Чому псевдо відстань? Тому що вона відрізняється від справжньої відстані на величину, яка рівна добутку швидкості світла на зсув шкали часу приймача щодо шкали часу системи. При вирішенні навігаційної задачі цей параметр визначається на рівні з координатами споживача (приймача).
1.7 Сфери застосування ГЛОНАСС :
- потреби Міністерства оборони;
- цивільна авіація;
- морський і річковий транспорт;
- геодезія і картографія;
- будівництво;
- наземний транспорт;
- системи безпеки;
- спорт;
- сільське господарство;
- рятувальні роботи;
- приватне використання.


Супутникова радіонавігаційна система GPS NAVSTAR