42. Устройство машин постоянного тока, способы возбуждения.
44. Электродвижущая
сила обмотки якоря и электромагнитный
момент машин постоянного тока.
![]() где
N
– число пазовых проводников; 2a
– число параллельных ветвей.
где
N
– число пазовых проводников; 2a
– число параллельных ветвей.![]() ЭДС одного пазового проводника, активная
длина которого li
ЭДС одного пазового проводника, активная
длина которого li
![]() где
где
![]()
![]() или
с учетом
или
с учетом![]()
![]() где
где
![]() -
постоянная для данной машины
-
постоянная для данной машины
![]() -
электромагнитная сила
-
электромагнитная сила
![]() -
электромагнитный момент
-
электромагнитный момент
где Da/2 – радиус сердечника якоря
![]()
![]() где
Ia/2a=ia
– ток
параллельной ветви
где
Ia/2a=ia
– ток
параллельной ветви
![]() где
где
![]() - постоянная
для данной машины.
- постоянная
для данной машины.
Где
![]() -
угловая скорость вращения
-
угловая скорость вращения![]() -
электромагнитная мощность машины
постоянного тока.
-
электромагнитная мощность машины
постоянного тока.
45. Магнитная цепь
и магнитное поле машины постоянного
тока. Реакция якоря машин постоянного
тока.
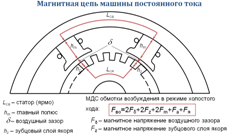 Lcя
– спинка
якоря Fm
– магнитное напряжение главного полюса
Fa
– магнитное напряжение статора (ярма)
Fя
– магнитное напряжение спинки якоря
Наибольшим
магнитным сопротивлением
обладает воздушный зазор d,
поэтому магнитное напряжение Fδ
намного больше
остальных слагаемых
Fво
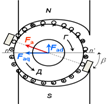
. Реакция
якоря машины постоянного тока
Если
магнитная
система машины не насыщена,
то реакция якоря будет лишь искажать
результирующий магнитный поток Ф,
не изменяя его значения: один край полюса
и находящийся под ним зубцовый слой
якоря, где МДС Fа
и
Fво
совпадают
по направлению, будут подмагничиваться,
а другой край полюса и соответствующий
слой якоря, где МДС Fа
и
Fво
не совпадают
по направлению, будут размагничиваться.
Результирующий
магнитный поток как бы поворачивается
относительно оси главных полюсов на
угол a.
Т. е. физическая нейтраль m
m’
смещается относительно геометрической
нейтрали n
n’
на угол a.
В режиме генератора
физическая нейтраль смещается по
направлению вращения якоря,
а режиме двигателя
– против
вращения якоря.
Искажения
результирующего поля неблагоприятно
влияет на рабочие свойства МПТ: 1.
сдвиг физической нейтрали ухудшает
условия работы щеточного контакта,
что может привести к усилению
искрения
на коллекторе;
2.
искажения поля приводит к неравномерному
распределению магнитной индукции в
зазоре , и, следовательно, к росту
мгновенных значений ЭДС отдельных
секций, что может привести к
такому
возрастанию напряжений между коллекторными
пластинами, при котором возможно
возникновения электрической дуги на
коллекторе. Если
магнитная
система машины насыщена,
то под влиянием реакции якоря
подмагничивание
одного края полюса и зубцового слоя
якоря происходит в
меньшей степени,
чем размагничивание
другого края полюса и зубцового слоя
якоря. При этом результирующий
магнитный поток Ф
уменьшается,
т.е. реакция
якоря в насыщенной машине размагничивает
магнитную систему.
В результате
у генераторов снижается
ЭДС, а у
двигателей – вращающий
момент. Влияние реакции якоря
усиливается при смещении
щеток с геометрической нейтрали,
т. к. вместе со щетками смещается и
вектор МДС якоря.
Lcя
– спинка
якоря Fm
– магнитное напряжение главного полюса
Fa
– магнитное напряжение статора (ярма)
Fя
– магнитное напряжение спинки якоря
Наибольшим
магнитным сопротивлением
обладает воздушный зазор d,
поэтому магнитное напряжение Fδ
намного больше
остальных слагаемых
Fво
. Реакция
якоря машины постоянного тока
Если
магнитная
система машины не насыщена,
то реакция якоря будет лишь искажать
результирующий магнитный поток Ф,
не изменяя его значения: один край полюса
и находящийся под ним зубцовый слой
якоря, где МДС Fа
и
Fво
совпадают
по направлению, будут подмагничиваться,
а другой край полюса и соответствующий
слой якоря, где МДС Fа
и
Fво
не совпадают
по направлению, будут размагничиваться.
Результирующий
магнитный поток как бы поворачивается
относительно оси главных полюсов на
угол a.
Т. е. физическая нейтраль m
m’
смещается относительно геометрической
нейтрали n
n’
на угол a.
В режиме генератора
физическая нейтраль смещается по
направлению вращения якоря,
а режиме двигателя
– против
вращения якоря.
Искажения
результирующего поля неблагоприятно
влияет на рабочие свойства МПТ: 1.
сдвиг физической нейтрали ухудшает
условия работы щеточного контакта,
что может привести к усилению
искрения
на коллекторе;
2.
искажения поля приводит к неравномерному
распределению магнитной индукции в
зазоре , и, следовательно, к росту
мгновенных значений ЭДС отдельных
секций, что может привести к
такому
возрастанию напряжений между коллекторными
пластинами, при котором возможно
возникновения электрической дуги на
коллекторе. Если
магнитная
система машины насыщена,
то под влиянием реакции якоря
подмагничивание
одного края полюса и зубцового слоя
якоря происходит в
меньшей степени,
чем размагничивание
другого края полюса и зубцового слоя
якоря. При этом результирующий
магнитный поток Ф
уменьшается,
т.е. реакция
якоря в насыщенной машине размагничивает
магнитную систему.
В результате
у генераторов снижается
ЭДС, а у
двигателей – вращающий
момент. Влияние реакции якоря
усиливается при смещении
щеток с геометрической нейтрали,
т. к. вместе со щетками смещается и
вектор МДС якоря.
 При этом МДС якоря Fа
помимо поперечной составляющей Fаq=
Fаcosb
приобретает и про-дольную составляющую
Fаd=
Fаsinb,
направлен-ную по оси полюсов. В
генераторном режиме:
– при смещении щеток по
направлению вращения якоря
продольная составляющая Fаd
размагничивает
машину, т.
е. ослабляет основной поток; – при
смещении щеток против
направления вращения якоря
про-дольная составляющая Fаd
подмагничивает
машину, т.
е. усиливает основной поток, но при этом
может явиться причиной искрения на
коллекторе. В
двигательном режиме:
– смещение щеток по
направлению вращения якоря
подмагничивает
машину;
– при смещении щеток против
направления вращения
продольная
составляющая Fаd
размагничивает
машину.
При этом МДС якоря Fа
помимо поперечной составляющей Fаq=
Fаcosb
приобретает и про-дольную составляющую
Fаd=
Fаsinb,
направлен-ную по оси полюсов. В
генераторном режиме:
– при смещении щеток по
направлению вращения якоря
продольная составляющая Fаd
размагничивает
машину, т.
е. ослабляет основной поток; – при
смещении щеток против
направления вращения якоря
про-дольная составляющая Fаd
подмагничивает
машину, т.
е. усиливает основной поток, но при этом
может явиться причиной искрения на
коллекторе. В
двигательном режиме:
– смещение щеток по
направлению вращения якоря
подмагничивает
машину;
– при смещении щеток против
направления вращения
продольная
составляющая Fаd
размагничивает
машину.
46. Устранение
вредного влияния реакции якоря в машинах
постоянного тока. Наиболее
эффективное средство – компенсационная
обмотка
(КО), которая укладывается в пазы полюсных
наконечников.
![]() Компенсационная
обмотка
включается последовательно
с обмоткой якоря
таким образом, чтобы ее МДС FКО
была противо-положна
направлению
МДС обмотки якоря Fа.
Такое включение КО обеспечивает
автоматическую
компенсацию
МДС якоря при любой нагрузке машины.
Компенсационная
обмотка
включается последовательно
с обмоткой якоря
таким образом, чтобы ее МДС FКО
была противо-положна
направлению
МДС обмотки якоря Fа.
Такое включение КО обеспечивает
автоматическую
компенсацию
МДС якоря при любой нагрузке машины.
![]() В межполюсном
пространстве компенсационная обмотка
не обеспечивает
полной компенсации
МДС якоря. Поэтому нежелательное
влияния МДС якоря на работу щеточного
контакта устраняют применением добавочных
полюсов.
В машинах малой и средней мощности,
не имеющих компенсационной обмотки,
вредное влияние реакции якоря по
поперечной оси ослабляют увеличением
зазора на краях главных полюсов.
Однако, это приводит к необходимости
повышения МДС главных полюсов и,
следовательно, к увеличению размеров
катушек, полюсов и всей машины в целом.
В межполюсном
пространстве компенсационная обмотка
не обеспечивает
полной компенсации
МДС якоря. Поэтому нежелательное
влияния МДС якоря на работу щеточного
контакта устраняют применением добавочных
полюсов.
В машинах малой и средней мощности,
не имеющих компенсационной обмотки,
вредное влияние реакции якоря по
поперечной оси ослабляют увеличением
зазора на краях главных полюсов.
Однако, это приводит к необходимости
повышения МДС главных полюсов и,
следовательно, к увеличению размеров
катушек, полюсов и всей машины в целом.

49. Уравнение
напряжения и частота вращения
двигателя
постоянного тока. Уравнение
напряжения
для якорной цепи двигателя, работающего
с постоянной частотой вращения![]()
![]()
![]() - мощность в цепи обмотки якоря
- мощность в цепи обмотки якоря
![]() -
мощность электрических потерь в цепи
якоря
-
мощность электрических потерь в цепи
якоря
![]() -
электромагнитная мощность двигателя
-
электромагнитная мощность двигателя
![]() -
уравнение
мощностей Подставим в уравнение
напряжений
-
уравнение
мощностей Подставим в уравнение
напряжений
![]() и выразим n
и выразим n![]() Регулировать
частоту вращения можно:
1)
изменением сопротивления в цепи якоря;
2) изменением основного магнитного
потока Ф; 3) изменением напряжения в
цепи якоря. 1) Введение дополнительного
сопротивления в цепь якоря
Регулировать
частоту вращения можно:
1)
изменением сопротивления в цепи якоря;
2) изменением основного магнитного
потока Ф; 3) изменением напряжения в
цепи якоря. 1) Введение дополнительного
сопротивления в цепь якоря
![]()
![]() n0=const,
Dn
2) Изменение основного магнитного потока
Ф
n0=const,
Dn
2) Изменение основного магнитного потока
Ф
![]()
 При
ослаблении Ф
n0
,
Dn
3) Изменение напряжения в цепи якоря U
При снижении U
При
ослаблении Ф
n0
,
Dn
3) Изменение напряжения в цепи якоря U
При снижении U
n0
¯,
Dn
=const
![]()
50. Пуск двигателя
постоянного тока. Из
уравнения напряжений
![]() В начальный момент пуска n
= 0 Þ
Еа=
0 и
В начальный момент пуска n
= 0 Þ
Еа=
0 и
![]()
![]() В цепь якоря включают пусковой
реостат rпр
В цепь якоря включают пусковой
реостат rпр
![]()
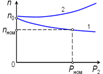
51. Двигатель параллельного возбуждения, его скоростные и механические характеристики. Характерная особенность этого двигателя:
ток в обмотке
возбуждения не зависит от нагрузки.
 Рабочие характеристики: зависимости
от полезной мощности при U
= const
и Iв
= const
- частоты вращения
Рабочие характеристики: зависимости
от полезной мощности при U
= const
и Iв
= const
- частоты вращения
![]() - полезного момента - вращающего момента
- полезного момента - вращающего момента
![]() - тока якоря
- тока якоря
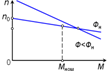
![]() Скоростная
характеристика:
Скоростная
характеристика:
![]()
![]()
![]() Вращающий
момент
Вращающий
момент
![]()
![]() Ток якоря
При Ф=const
график
совпадает с графиком
тк
Ток якоря
При Ф=const
график
совпадает с графиком
тк
![]()
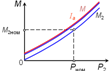 Механическая
характеристика:
Механическая
характеристика:
![]() подставим
подставим![]()
![]()

52. Регулирование частоты вращения двигателей параллельного возбуждения.см 1твет №51
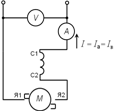
53. Двигатель
последовательного возбуждения, его
особенности, рабочие и механические
характеристики.
В этом двигателе обмотка возбуждения
включена последовательно
в цепь якоря, поэтому магнитный поток
Ф в
нем зависит от тока нагрузки I
= Iа=
Iв
, При небольших нагрузках магнитная
система машины не
насыщена
и зависимость магнитного потока от тока
нагрузки прямо пропорциональна:
![]() В
этом случае электромагнитный момент:
В
этом случае электромагнитный момент:
![]() А
частота вращения:
А
частота вращения:

 Таким образом,
вращающий
момент
двигателя последовательного возбуждения
при ненасыщенном состоянии магнитной
системы пропорционален
квадрату тока,
а частота
вращения обратно пропорциональна току
нагрузки. Рабочие характеристики ДПТ
последовательного возбуждения:
Таким образом,
вращающий
момент
двигателя последовательного возбуждения
при ненасыщенном состоянии магнитной
системы пропорционален
квадрату тока,
а частота
вращения обратно пропорциональна току
нагрузки. Рабочие характеристики ДПТ
последовательного возбуждения:
![]() и
и
![]()
![]() При больших нагрузках (I
> Iном)
наступает насыщение
магнитной
системы.
При этом магнитный поток при дальнейшем
изменении нагрузки не изменяется (Ф
- const)
и характе-ристики приобретают почти
прямо-линейный
характер.
Характеристика
При больших нагрузках (I
> Iном)
наступает насыщение
магнитной
системы.
При этом магнитный поток при дальнейшем
изменении нагрузки не изменяется (Ф
- const)
и характе-ристики приобретают почти
прямо-линейный
характер.
Характеристика
![]() - «мягкая», т.е. частота вращения
значи-тельно изменяется при изменении
нагрузки. При
уменьшении
нагрузки
частота
вращения
резко
увеличивается,
и при токе нагрузки менее 0,25 Iном
частота вращения может достичь опасных
пределов (двигатель «уйдет
в разнос»).
- «мягкая», т.е. частота вращения
значи-тельно изменяется при изменении
нагрузки. При
уменьшении
нагрузки
частота
вращения
резко
увеличивается,
и при токе нагрузки менее 0,25 Iном
частота вращения может достичь опасных
пределов (двигатель «уйдет
в разнос»).

![]() 1
– естественная; 2 – искусственная.
Резко падающие механические характеристики
обеспечивают двигателю последовательного
возбуждения устойчивую
работу при любой механической нагрузке
Свойство этих двигателей разви-вать
большой вращающий момент, пропорциональный
квадрату тока нагрузки, имеет важное
значение при пуске и перегрузках.
Это свойство обусловливает их широкое
применение в качестве тяговых двигателей
на транспорте, в качестве крановых
двигателей в подъемных установках и
других случаях электропривода с тяжелыми
условиями пуска и сочетания значительных
нагрузок на вал с малой частотой вращения.
1
– естественная; 2 – искусственная.
Резко падающие механические характеристики
обеспечивают двигателю последовательного
возбуждения устойчивую
работу при любой механической нагрузке
Свойство этих двигателей разви-вать
большой вращающий момент, пропорциональный
квадрату тока нагрузки, имеет важное
значение при пуске и перегрузках.
Это свойство обусловливает их широкое
применение в качестве тяговых двигателей
на транспорте, в качестве крановых
двигателей в подъемных установках и
других случаях электропривода с тяжелыми
условиями пуска и сочетания значительных
нагрузок на вал с малой частотой вращения.
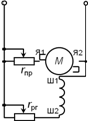
54. Регулирование
частоты вращения двигателей
последовательного возбуждения.
Регулирование
частоты вращения:
1) изменением напряжения. 2) изменением
магнитного потока обмотки возбуждения;
1.а – включением
в
цепь
якоря
регулировочного
реостата
Rрг

 С увеличением реостата Rрг
уменьшается напряжение на двигателе
и, следовательно, снижается
частота
вращения.
Этот способ применяется только в
двигателях небольшой
мощности
из-за больших потерь энергии в реостате
Rрг.
1.б
– частоту вращения можно регулировать
изменением
напряжения
U,
подводимого
к
двигателю,
посредством
источника
питания с
регулируемым напряжением. При
уменьшении напряжения U
на двигателе, его механические
характеристики смещаются
вниз
не меняя
своей
кривизны.
С увеличением реостата Rрг
уменьшается напряжение на двигателе
и, следовательно, снижается
частота
вращения.
Этот способ применяется только в
двигателях небольшой
мощности
из-за больших потерь энергии в реостате
Rрг.
1.б
– частоту вращения можно регулировать
изменением
напряжения
U,
подводимого
к
двигателю,
посредством
источника
питания с
регулируемым напряжением. При
уменьшении напряжения U
на двигателе, его механические
характеристики смещаются
вниз
не меняя
своей
кривизны.
![]() При уменьшении напряжения U
на двигателе, его механические
характеристики смещаются
вниз
не меняя
своей
кривизны.
1.в
– при совместной работе нескольких
однотипных двигателей
частоту вращения можно регулировать
изменением
схемы
их
включения:
– при
параллельном
включении
двигателей каждый из них работает под
полным напряжением сети; – при
последовательном
включении
двух двигателей на каждый двигатель
приходится половина напряжения сети.
Этот способ регулирования частоты
вращения применяется, например, в
электровозах,
где установлено несколько одинаковых
тяговых двигателей. 2.
Регулировать частоту вращения изменением
магнитного
потока
можно тремя способами: - шунтированием
обмотки возбуждения реостатом; -
секционированием обмотки возбуждения;
- шунтированием обмотки якоря. 2.а
– шунтирование
обмотки
возбуждения
реостатом Rш1
и уменьшение
сопротивления этого реостата ведет
к снижению тока возбуждения Iв
= Iа
– Iш
и,
следовательно,
к росту
частоты
вращения
При уменьшении напряжения U
на двигателе, его механические
характеристики смещаются
вниз
не меняя
своей
кривизны.
1.в
– при совместной работе нескольких
однотипных двигателей
частоту вращения можно регулировать
изменением
схемы
их
включения:
– при
параллельном
включении
двигателей каждый из них работает под
полным напряжением сети; – при
последовательном
включении
двух двигателей на каждый двигатель
приходится половина напряжения сети.
Этот способ регулирования частоты
вращения применяется, например, в
электровозах,
где установлено несколько одинаковых
тяговых двигателей. 2.
Регулировать частоту вращения изменением
магнитного
потока
можно тремя способами: - шунтированием
обмотки возбуждения реостатом; -
секционированием обмотки возбуждения;
- шунтированием обмотки якоря. 2.а
– шунтирование
обмотки
возбуждения
реостатом Rш1
и уменьшение
сопротивления этого реостата ведет
к снижению тока возбуждения Iв
= Iа
– Iш
и,
следовательно,
к росту
частоты
вращения
![]() Этот
способ экономичнее предыдущего и
применяется чаще и оценивается
коэффициентом ослабления поля
Этот
способ экономичнее предыдущего и
применяется чаще и оценивается
коэффициентом ослабления поля
![]() Резистор Rш
выбирается таким, чтобы b
< 50%.
Резистор Rш
выбирается таким, чтобы b
< 50%.

2.б – при секционировании обмотки возбуждения отключение части витков обмотки сопровождается ростом частоты вращения.

2.в
– при
шунтировании
обмотки
якоря
реостатом Rш2
увеличивается
ток возбуждения Iв
= Iа
+ Iш
, что приводит
к снижению
частоты
вращения.
Этот
способ регулирования, хотя и обеспечивает
глубокую регулировку частоты вращения
(вплоть до остановки), но он неэкономичен
(из-за значительных потерь в реостате
Rш2)
и применяется редко.

55. Генераторы
постоянного тока. Уравнения напряжений
и мощностей.
В процессе работы генератора
постоянного тока в обмотке якоря
индуцируется ЭДС:
![]() При подключении к генератору нагрузки,
в цепи якоря возникает ток Iа,
а на нагрузке устанавливается напряжение:
При подключении к генератору нагрузки,
в цепи якоря возникает ток Iа,
а на нагрузке устанавливается напряжение:
![]() - уравнение
напряжений генератора Ток в
проводниках обмотки якоря Iа,
взаимодействуя с магнитным полем,
создает на якоре электромагнитный
момент
М, который в
генераторе направлен встречно вращающему
моменту приводного двигателя, т.е.
является тормозящим.
При неизменной частоте вращения
(n=const)
вращающий момент приводного двигателя
М1
уравновешивается суммой противодействующих
моментов:
- уравнение
напряжений генератора Ток в
проводниках обмотки якоря Iа,
взаимодействуя с магнитным полем,
создает на якоре электромагнитный
момент
М, который в
генераторе направлен встречно вращающему
моменту приводного двигателя, т.е.
является тормозящим.
При неизменной частоте вращения
(n=const)
вращающий момент приводного двигателя
М1
уравновешивается суммой противодействующих
моментов:
![]() - уравнение моментов
генератора М0
– момент
х. х. , т.е. момент, создаваемый силами
трения и действием вихревых токов в
якоре. Умножив уравнение моментов
на угловую скорость вращения w
получим уравнение
мощностей:
- уравнение моментов
генератора М0
– момент
х. х. , т.е. момент, создаваемый силами
трения и действием вихревых токов в
якоре. Умножив уравнение моментов
на угловую скорость вращения w
получим уравнение
мощностей:
![]() где
где![]() - механическая мощность подводимая к
генератору,
- механическая мощность подводимая к
генератору,
![]() - мощность х. х.
(подводимая к генератору в режиме х. х.,
т. е. при отключенной нагрузке);
- мощность х. х.
(подводимая к генератору в режиме х. х.,
т. е. при отключенной нагрузке);
![]() -
электромагнитная мощность генератора.
С другой стороны
-
электромагнитная мощность генератора.
С другой стороны
![]() тогда
тогда![]() где
где
![]() - полезная мощность генератора,
т.е. мощность отдаваемая генератором
нагрузке;
- полезная мощность генератора,
т.е. мощность отдаваемая генератором
нагрузке;
![]() -
мощность потерь на нагрев обмоток и
щеточного контакта в цепи якоря. В
результате, учитывая потери на
возбуждение
-
мощность потерь на нагрев обмоток и
щеточного контакта в цепи якоря. В
результате, учитывая потери на
возбуждение![]() ,
получаем уравнение
мощностей генератора:
,
получаем уравнение
мощностей генератора:
![]() Механическая мощность, развиваемая
приводным двигателем , преобра-зуется
в генераторе в
полезную мощность , передаваемую
нагрузке, и мощность, затрачиваемую на
покрытие потерь
Механическая мощность, развиваемая
приводным двигателем , преобра-зуется
в генераторе в
полезную мощность , передаваемую
нагрузке, и мощность, затрачиваемую на
покрытие потерь![]()
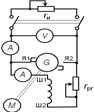
56. Генератор постоянного тока независимого возбуждения, его особенности и характеристики. Обмотка возбуждения питается от внешнего, независимого от якорной цепи, источника постоянного тока. 1. Характеристика холостого хода U0 = f (Iв), при Iа = 0 и n = const.

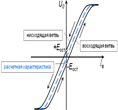 Еост
– остаточная
ЭДС,
обусловленная явлением остаточного
намагничивания. Характеристика U0
= f
(Iв)
повторяет в другом масштабе магнитную
характе-ристику машины и дает возможность
судить о магнитных
свойствах
машины .
2.
Нагрузочная характеристика – зависимость
Uа
= f
(Iв),
при I
= const
и n
= const.
Нагрузочная
характеристика проходит ниже
характеристики холостого хода по
следующим причинам:
Еост
– остаточная
ЭДС,
обусловленная явлением остаточного
намагничивания. Характеристика U0
= f
(Iв)
повторяет в другом масштабе магнитную
характе-ристику машины и дает возможность
судить о магнитных
свойствах
машины .
2.
Нагрузочная характеристика – зависимость
Uа
= f
(Iв),
при I
= const
и n
= const.
Нагрузочная
характеристика проходит ниже
характеристики холостого хода по
следующим причинам:
![]()
 1
– падение
напряжения в обмотке якоря
1
– падение
напряжения в обмотке якоря![]() ;
2 – размагничивающее
воздействие реакции якоря
на магнитный поток
Ф и,
следовательно, снижение Еа.
Треугольник a
b
c
– характеристический.
ab
– падение напряжения на обмотке якоря
;
bc
– ток возбуждения, компенсирующий
размагничивающее воздействия реакции
якоря
;
2 – размагничивающее
воздействие реакции якоря
на магнитный поток
Ф и,
следовательно, снижение Еа.
Треугольник a
b
c
– характеристический.
ab
– падение напряжения на обмотке якоря
;
bc
– ток возбуждения, компенсирующий
размагничивающее воздействия реакции
якоря
![]() ;
ae
– напряжение на выходе генератора U
под нагрузкой; be
– ЭДС генератора Еа
под нагрузкой; de
– напряжение на выходе генератора U0
в режиме холостого хода при токе
возбуждения
;
ae
– напряжение на выходе генератора U
под нагрузкой; be
– ЭДС генератора Еа
под нагрузкой; de
– напряжение на выходе генератора U0
в режиме холостого хода при токе
возбуждения![]() .
3. Внешняя
характеристика
Uа
= f
(Iа),
при Iв
= const
и n
= const.
Изменение
напряжения на якоре ΔU
при
изменении нагрузки от 0 до Iном
обусловлено:
1 – падением напряжения в обмотке
якоря
2 – размагничивающим воздействием
реакции якоря на магнитный поток. 4.
Регулировочная
характеристика
Iв
= f
(Iа),
при Uа
= const
и n
= const.
Эта характеристика показывает каким
образом необходимо регулировать ток
возбуждения Iв
при изменении нагрузки, чтобы напряжение
на выходе генера-тора Uа
оставалось неизменным.
.
3. Внешняя
характеристика
Uа
= f
(Iа),
при Iв
= const
и n
= const.
Изменение
напряжения на якоре ΔU
при
изменении нагрузки от 0 до Iном
обусловлено:
1 – падением напряжения в обмотке
якоря
2 – размагничивающим воздействием
реакции якоря на магнитный поток. 4.
Регулировочная
характеристика
Iв
= f
(Iа),
при Uа
= const
и n
= const.
Эта характеристика показывает каким
образом необходимо регулировать ток
возбуждения Iв
при изменении нагрузки, чтобы напряжение
на выходе генера-тора Uа
оставалось неизменным.
![]()
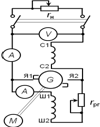
57. Генератор
постоянного тока параллельного
возбуждения. Условие самовозбуждения.
Принцип
самовозбуждения
ГПТ параллельного возбуждения основан
на способности магнитной системы
длительное время сохранять небольшой
магнитный поток
остаточного
магнетизма.
![]() При вращении якоря поток Фост
индуцирует в якорной обмотке ЭДС Еост,
под действием которой в обмотке
возбуждения возникает небольшой ток
Iв
ост Если
МДС обмотки возбуждения имеет такое же
направление, что и Фост,
то поток главных полюсов увеличивается.
Это приводит к увеличению ЭДС генератора,
отчего ток возбуждения вновь увеличивается.
Этот процесс самовозбуждения будет
продолжаться до тех пор пока напряжение
генератора не будет уравновешено
падением напряжения в цепи возбуждения,
т. е.
При вращении якоря поток Фост
индуцирует в якорной обмотке ЭДС Еост,
под действием которой в обмотке
возбуждения возникает небольшой ток
Iв
ост Если
МДС обмотки возбуждения имеет такое же
направление, что и Фост,
то поток главных полюсов увеличивается.
Это приводит к увеличению ЭДС генератора,
отчего ток возбуждения вновь увеличивается.
Этот процесс самовозбуждения будет
продолжаться до тех пор пока напряжение
генератора не будет уравновешено
падением напряжения в цепи возбуждения,
т. е.
![]()
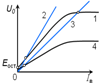 1
– характеристика холостого хода U0
= f
(Iв),
при n
= nном;
2 – характеристика Iв
rв
= f
(Iв),
при rв
>rв
кр;
3 –
характеристика Iв
rв
= f
(Iв),
при rв<
rв
кр;
4 –
характеристика холостого хода U0
= f
(Iв),
при n
= 0,5 nном;
Условие
самовозбуждения
генератора
параллельного
возбуждения:
1. магнитная система должна обладать
остаточным магнетизмом; 2.
присоединение обмотки возбуждения
должно быть таким, чтобы МДС обмотки
возбуждения совпадала с остаточным
потоком Фост;
3. сопротивление в цепи возбуждения
должно быть меньше критического, т.
е. rв<
rв
кр;
4. частота
вращения якоря должна быть больше
критической, т. е. n
> n
кр.
1
– характеристика холостого хода U0
= f
(Iв),
при n
= nном;
2 – характеристика Iв
rв
= f
(Iв),
при rв
>rв
кр;
3 –
характеристика Iв
rв
= f
(Iв),
при rв<
rв
кр;
4 –
характеристика холостого хода U0
= f
(Iв),
при n
= 0,5 nном;
Условие
самовозбуждения
генератора
параллельного
возбуждения:
1. магнитная система должна обладать
остаточным магнетизмом; 2.
присоединение обмотки возбуждения
должно быть таким, чтобы МДС обмотки
возбуждения совпадала с остаточным
потоком Фост;
3. сопротивление в цепи возбуждения
должно быть меньше критического, т.
е. rв<
rв
кр;
4. частота
вращения якоря должна быть больше
критической, т. е. n
> n
кр.
58. Основные
характеристики генераторов параллельного
и смешанного
возбуждения.
1. Характеристика
холостого хода
– зависимость U0
= f
(Iв),
при I
= 0 и n
= const.
Так как ГПТ параллельного возбуждения
самовозбуждается лишь при одном
направ-лении тока Iв,
то
характеристика х. х. может быть снята
только для одного квадранта осей
координат.
 2. Нагрузочная
характеристика
Uа
= f
(Iв),
при I
= const
и n
= const.
практически не отличается от характеристики
ГПТ независимого возбуждения.
3. Внешняя
характеристика
Uа
= f
(Iа),
при rрг
= const
и n
= const.
2. Нагрузочная
характеристика
Uа
= f
(Iв),
при I
= const
и n
= const.
практически не отличается от характеристики
ГПТ независимого возбуждения.
3. Внешняя
характеристика
Uа
= f
(Iа),
при rрг
= const
и n
= const.
 1 – ГПТ независимого возбуждения 2 –
ГПТ параллельного возбуждения 3 –
«постепенное» короткое замыкание 4 –
«внезапное» короткое замыкание 4.
Регулировочная
характеристика
Iв
= f
(Iа),
при Uа
= const
и n
= const.
1 – ГПТ независимого возбуждения 2 –
ГПТ параллельного возбуждения 3 –
«постепенное» короткое замыкание 4 –
«внезапное» короткое замыкание 4.
Регулировочная
характеристика
Iв
= f
(Iа),
при Uа
= const
и n
= const.
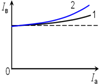 1 – ГПТ независимого возбуждения 2 –
ГПТ параллельного возбуждения Генератор
постоянного тока смешанного возбуждения:
Основной
магнитный
поток
создается обмоткой параллельного
возбуждения. Согласное
включение
обмоток параллельного и последовательного
возбуждения (направления МДС обмоток
совпадают) обеспечивает более жесткую
внешнюю характеристику. МДС обмотки
последовательного возбуждения
компенсирует размагничивающее влияния
реакции якоря и падение напряжения в
якоре.
1 – ГПТ независимого возбуждения 2 –
ГПТ параллельного возбуждения Генератор
постоянного тока смешанного возбуждения:
Основной
магнитный
поток
создается обмоткой параллельного
возбуждения. Согласное
включение
обмоток параллельного и последовательного
возбуждения (направления МДС обмоток
совпадают) обеспечивает более жесткую
внешнюю характеристику. МДС обмотки
последовательного возбуждения
компенсирует размагничивающее влияния
реакции якоря и падение напряжения в
якоре.
![]() При
встречном
включении
обмоток возбуждения внешняя
характеристика
будет более
«мягкой»
из-за размагничивающего влияния
последовательной обмотки возбуждения.
Встречное включение применяют тогда,
когда надо получить круто падающую
внешнюю характеристику, например, у
сварочных генераторов.
Регулировочная
характеристика
Iв
= f
(Iа),
при Uа
= const
и n
= const.
При
встречном
включении
обмоток возбуждения внешняя
характеристика
будет более
«мягкой»
из-за размагничивающего влияния
последовательной обмотки возбуждения.
Встречное включение применяют тогда,
когда надо получить круто падающую
внешнюю характеристику, например, у
сварочных генераторов.
Регулировочная
характеристика
Iв
= f
(Iа),
при Uа
= const
и n
= const.
![]() 1 – ГПТ параллельного возбуждения; 2 –
ГПТ смешанного возбуждения (согласное
включение ОВ); 3 – ГПТ смешанного
возбуждения (встречное включение ОВ).
1 – ГПТ параллельного возбуждения; 2 –
ГПТ смешанного возбуждения (согласное
включение ОВ); 3 – ГПТ смешанного
возбуждения (встречное включение ОВ).
59.
Потери и коэффициент полезного действия
машин постоянного тока. Потери
в МПТ: основные
(магнитные, электрические и механические)
и добавочные
Магнитные
потери
![]() В процессе работы машины постоянного
тока перемагничивается только сердечник
якоря. В сердечнике якоря основные
магнитные потери
В процессе работы машины постоянного
тока перемагничивается только сердечник
якоря. В сердечнике якоря основные
магнитные потери
![]() где
Рмz
– магнитные
потери в зубцовом слое якоря; Рмc
– магнитные потери в спинке якоря.
Электрические
потери. Потери в цепи возбуждения
где
Рмz
– магнитные
потери в зубцовом слое якоря; Рмc
– магнитные потери в спинке якоря.
Электрические
потери. Потери в цепи возбуждения
![]() где
Uв
– напряжение на зажимах цепи возбуждения.
Потери в цепи якоря
где
Uв
– напряжение на зажимах цепи возбуждения.
Потери в цепи якоря
![]() где ∑r
– сопротивление в цепи якоря Потери в
контакте щеток
где ∑r
– сопротивление в цепи якоря Потери в
контакте щеток
![]() где ΔUщ
– переходное падение напряжения на
щетках обеих полярностей. Потери
коллекторной машины постоянного тока
Электрические
потери
в
цепи
якоря
и
в
щеточном
контакте
зависят от нагрузки машины и называются
переменными.
Механические потери
где ΔUщ
– переходное падение напряжения на
щетках обеих полярностей. Потери
коллекторной машины постоянного тока
Электрические
потери
в
цепи
якоря
и
в
щеточном
контакте
зависят от нагрузки машины и называются
переменными.
Механические потери
![]() где
Рк
– потери
от трения щеток о коллектор;
Рп
– потери от трения в подшипниках;
Рвен
– вентиляционные потери.
Механические
и
магнитные
потери
при стабильной частоте вращения можно
считать постоянными.
Добавочные потери складываются
из: - потерь
от вихревых токов в меди обмоток, потерь
в уравнительных соединениях, - потерь
в стали якоря из-за неравномерного
распределения индукции при нагрузке,
- потерь в полюсных наконечниках при
пульсации основного магнитного потока
вследствие зубчатого якоря и т.д. В МПТ
без компенсационной обмотки
где
Рк
– потери
от трения щеток о коллектор;
Рп
– потери от трения в подшипниках;
Рвен
– вентиляционные потери.
Механические
и
магнитные
потери
при стабильной частоте вращения можно
считать постоянными.
Добавочные потери складываются
из: - потерь
от вихревых токов в меди обмоток, потерь
в уравнительных соединениях, - потерь
в стали якоря из-за неравномерного
распределения индукции при нагрузке,
- потерь в полюсных наконечниках при
пульсации основного магнитного потока
вследствие зубчатого якоря и т.д. В МПТ
без компенсационной обмотки
![]() от полезной мощности ; В МПТ с компенсационной
обмоткой
от полезной мощности ; В МПТ с компенсационной
обмоткой
![]() от полезной мощности . Коэффициент
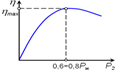
полезного действия:
от полезной мощности . Коэффициент
полезного действия:
![]() Подводимая
мощность Р1
. Для генератора
– механическая
мощность
Подводимая
мощность Р1
. Для генератора
– механическая
мощность
![]() Для
двигателя – электрическая
мощность
Для
двигателя – электрическая
мощность
![]() Полезная мощность
Р2
Для генератора – электрическая
мощность
Полезная мощность
Р2
Для генератора – электрическая
мощность![]() Для
двигателя – механическая
мощность
Для
двигателя – механическая
мощность
![]() Суммарная
мощность потерь
Суммарная
мощность потерь
![]() Для
генератора
Для
генератора
![]() Для
двигателя
Для
двигателя
![]() Для
машин с мощностью от 1 до 100 кВт КПД - от
75% до 90%.Для машин с мощностью более 100
кВт КПД - от 90% до 97%.
КПД
можно определить:
1) методом
непосредственной
нагрузки
– по результа-там измерений подведенной
и отдаваемой мощностей (Применяется
для машин малой мощности). 2) косвенным
методом
– по результатам измерения потерь. Из
опыта х.х. определяются магнитные и
механические потери, а электрические
потери рассчитываются после измерения
электрических сопротивлений.
Для
машин с мощностью от 1 до 100 кВт КПД - от
75% до 90%.Для машин с мощностью более 100
кВт КПД - от 90% до 97%.
КПД
можно определить:
1) методом
непосредственной
нагрузки
– по результа-там измерений подведенной
и отдаваемой мощностей (Применяется
для машин малой мощности). 2) косвенным
методом
– по результатам измерения потерь. Из
опыта х.х. определяются магнитные и
механические потери, а электрические
потери рассчитываются после измерения
электрических сопротивлений.